
用于实时、物理准确且逼真的眼镜试戴的流程和方法.pdf

一条****然后

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于实时、物理准确且逼真的眼镜试戴的流程和方法.pdf
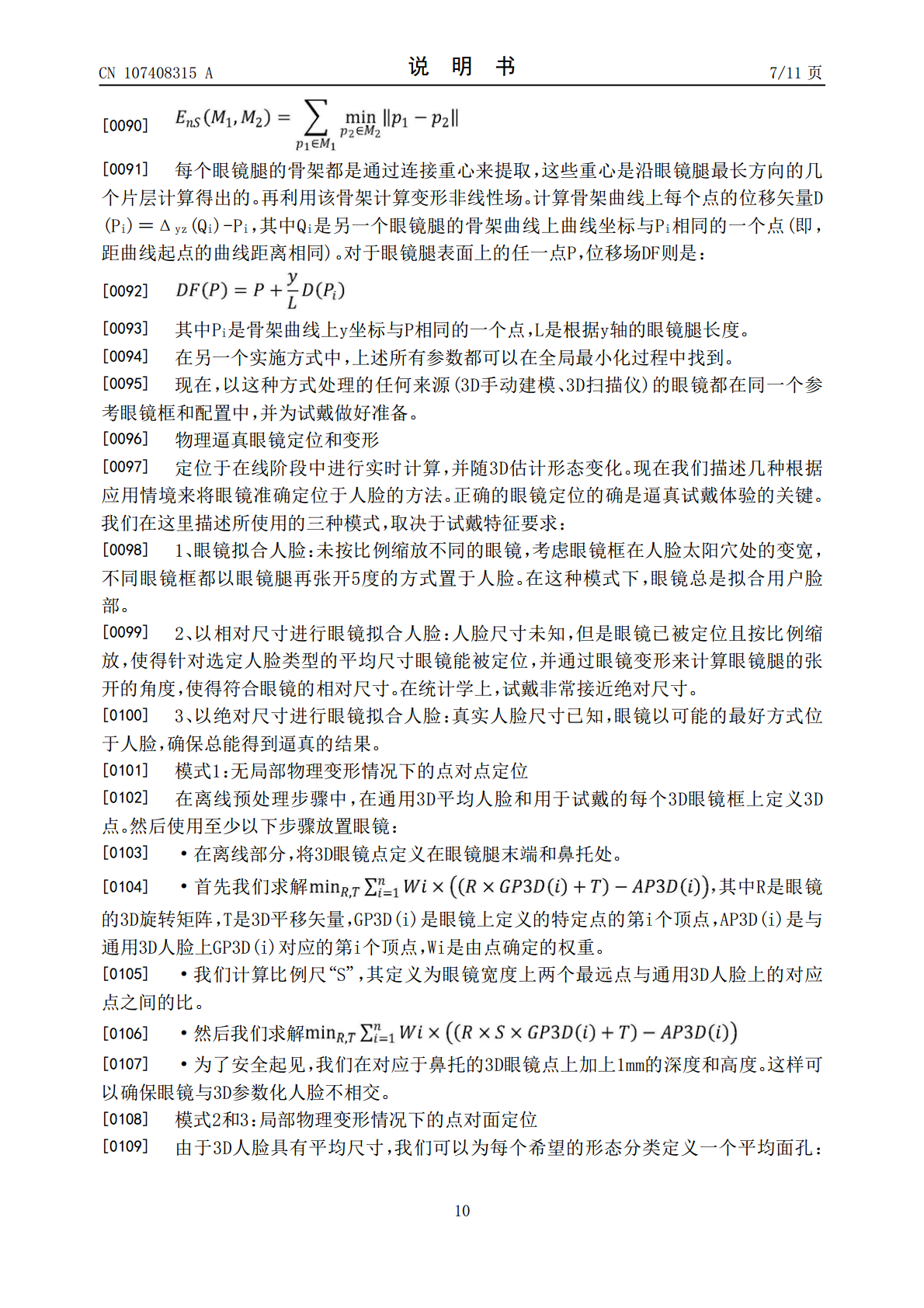
本发明旨在提供一种用于创建位于一个真实用户脸部图像上的一副虚拟眼镜的实时逼真图像的方法,所述真实用户脸部图像来自单个图像、一组图片、视频剪辑或实时相机视频流,该方法特征在于包括以下步骤:‑100、一个人脸分析过程,该过程用于估计用户脸部的3D旋转矩阵、3D平移矢量和形态参数;‑200、一个眼镜定位过程,该过程与用于外观或真实尺寸模拟的试戴模式相关联,用于估计虚拟眼镜的3D旋转矩阵、3D平移矢量和全局与局部变形参数,以及眼镜腿与眼镜框的连接,适于步骤100中计算得到的形态参数;‑400、一个逼真渲染过程,该
眼镜虚拟三维试戴方法和眼镜虚拟三维试戴系统.pdf
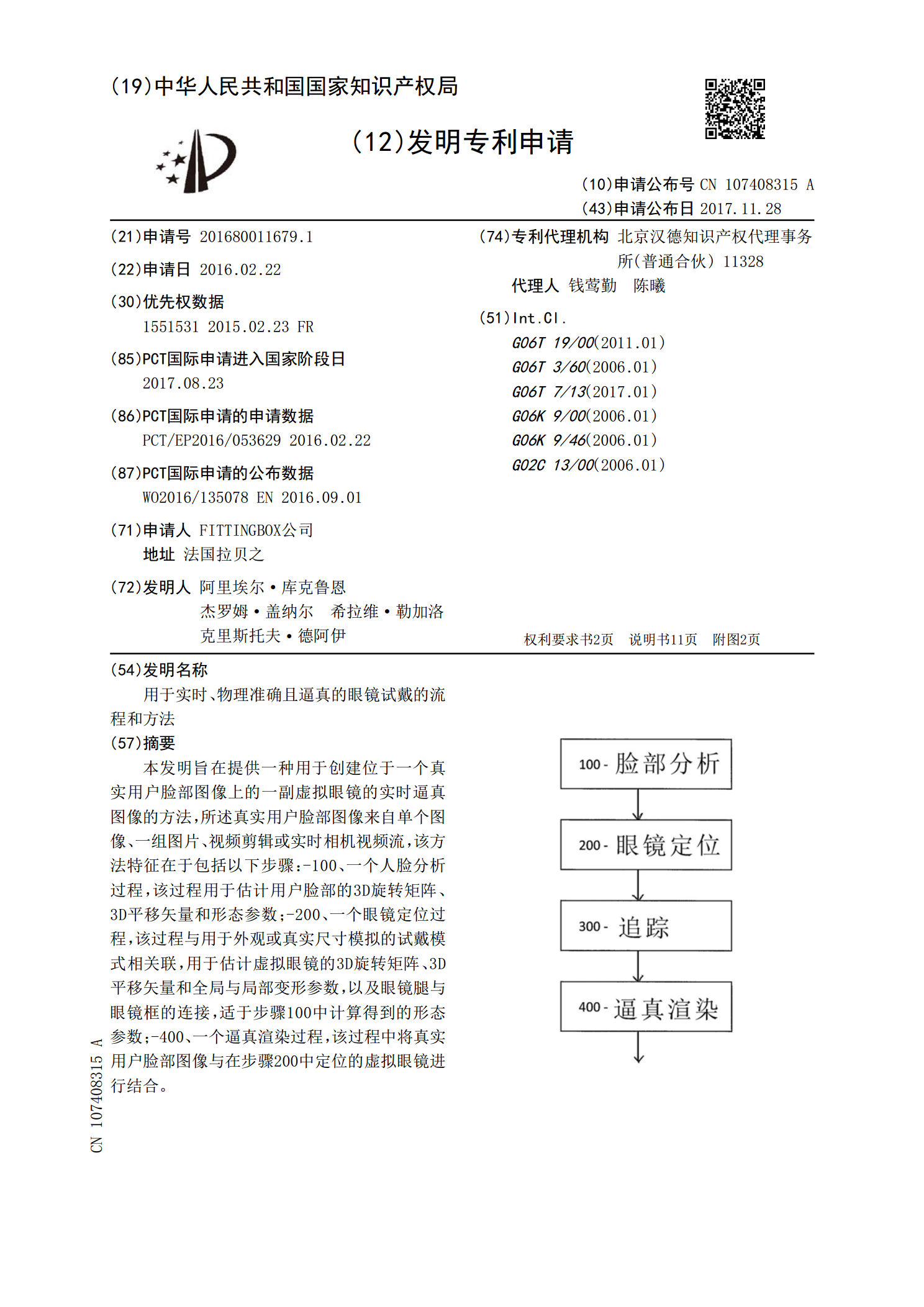
本发明涉及一种眼镜虚拟三维试戴方法和眼镜虚拟三维试戴系统,包括获取人脸戴眼镜和不戴眼镜的三维模型,将人脸戴眼镜和不戴眼镜的三维模型进行匹配对齐,获取佩戴的眼镜在人脸不戴眼镜的三维模型上的佩戴位置,根据佩戴位置将三维眼镜模型佩戴到人脸不戴眼镜的三维模型上,此方法通过三维虚拟试戴,能实现多个不同角度的三维试戴效果展示,提高三维眼镜试戴的逼真度和效率,提高用户试戴体验。

用于实时仿真的高阶Runge—Kutta方法.docx
用于实时仿真的高阶Runge—Kutta方法用于实时仿真的高阶Runge-Kutta方法摘要:随着科技的不断发展,实时仿真在工业、交通、医疗等领域中应用广泛。而高阶Runge-Kutta方法作为一种常用的数值求解方法,对于实现实时仿真具有重要意义。本文首先介绍了实时仿真的基本概念和需求,然后详细介绍了高阶Runge-Kutta方法的原理和特点,并对其在实时仿真中的应用进行了探讨和分析。通过实例分析,验证了高阶Runge-Kutta方法在实时仿真中的有效性和可行性。关键词:实时仿真;高阶Runge-Kutt
眼镜镜片和用于生产眼镜镜片的方法.pdf
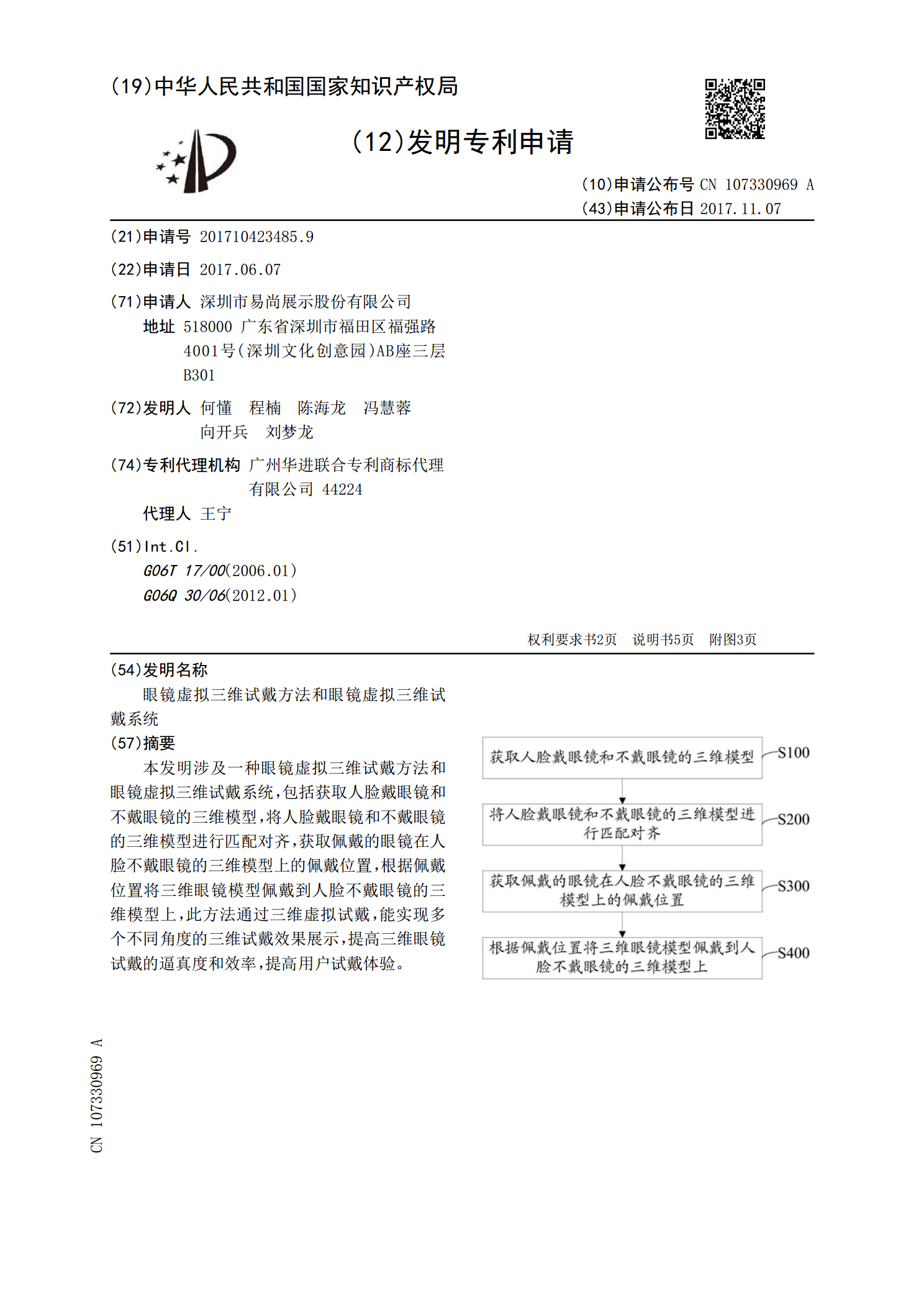
本发明涉及一种用于用户(114)的至少一只眼睛(112)的眼镜镜片(110)、一种用于生产眼镜镜片(110)的方法以及一种计算机程序产品,该计算机程序产品包括执行用于生产眼镜镜片(110)的方法的可执行指令。眼镜镜片(110)包括至少一个永久标记(120),其中,至少一个永久标记(120)是或包括至少一个衍射结构(124),其中,通过照射衍射结构(124)生成的至少一个衍射图案被指定为在第一种照明(132)下不可见并且被指定为仅在第二种照明(144)下可见。眼镜镜片(110)上的永久标记(120)一方面对
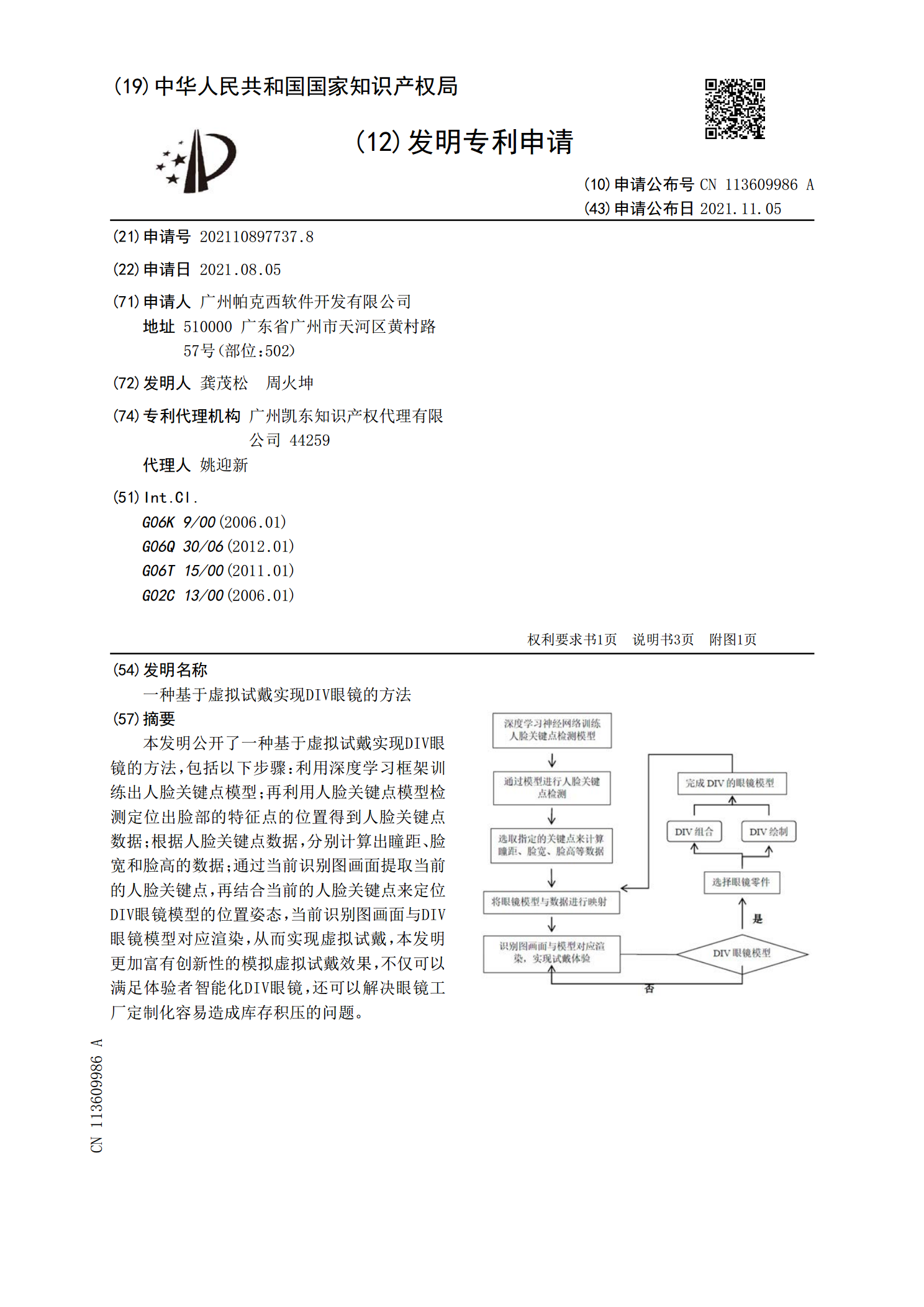
一种基于虚拟试戴实现DIV眼镜的方法.pdf
本发明公开了一种基于虚拟试戴实现DIV眼镜的方法,包括以下步骤:利用深度学习框架训练出人脸关键点模型;再利用人脸关键点模型检测定位出脸部的特征点的位置得到人脸关键点数据;根据人脸关键点数据,分别计算出瞳距、脸宽和脸高的数据;通过当前识别图画面提取当前的人脸关键点,再结合当前的人脸关键点来定位DIV眼镜模型的位置姿态,当前识别图画面与DIV眼镜模型对应渲染,从而实现虚拟试戴,本发明更加富有创新性的模拟虚拟试戴效果,不仅可以满足体验者智能化DIV眼镜,还可以解决眼镜工厂定制化容易造成库存积压的问题。