
渲染感知地图的方法和装置.pdf

猫巷****奕声


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

渲染感知地图的方法和装置.pdf
公开了一种渲染感知地图的方法和装置。该方法包括:确定虚拟目标车辆在自动驾驶虚拟场景的当前帧中的当前位置;通过解析高精度地图来至少获得以当前位置为基准点且在预定范围内的车道线;根据相邻的车道线来确定车道的结构;根据所确定的车道的结构来确定所述车道是否是可行驶的;以及在包括预定范围的感知地图上至少将可行驶的车道渲染为可行驶区域。通过该方法和装置,能够在渲染例如车道及车道线等地图元素的同时高效且准确地渲染障碍物的遮挡情况。
地图渲染方法和地图渲染装置.pdf
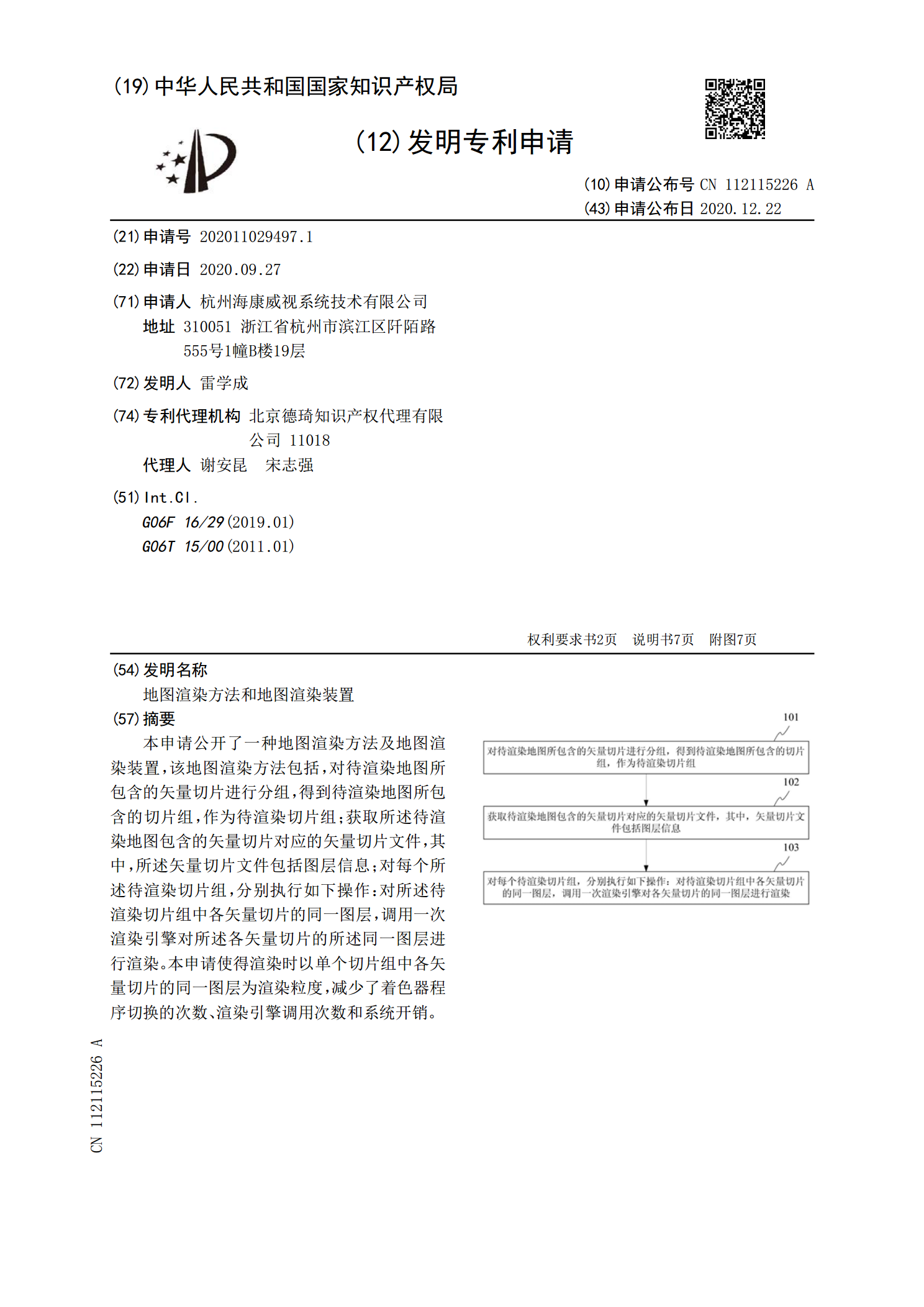
本申请公开了一种地图渲染方法及地图渲染装置,该地图渲染方法包括,对待渲染地图所包含的矢量切片进行分组,得到待渲染地图所包含的切片组,作为待渲染切片组;获取所述待渲染地图包含的矢量切片对应的矢量切片文件,其中,所述矢量切片文件包括图层信息;对每个所述待渲染切片组,分别执行如下操作:对所述待渲染切片组中各矢量切片的同一图层,调用一次渲染引擎对所述各矢量切片的所述同一图层进行渲染。本申请使得渲染时以单个切片组中各矢量切片的同一图层为渲染粒度,减少了着色器程序切换的次数、渲染引擎调用次数和系统开销。
地图渲染方法、地图渲染装置、地图服务器和存储介质.pdf
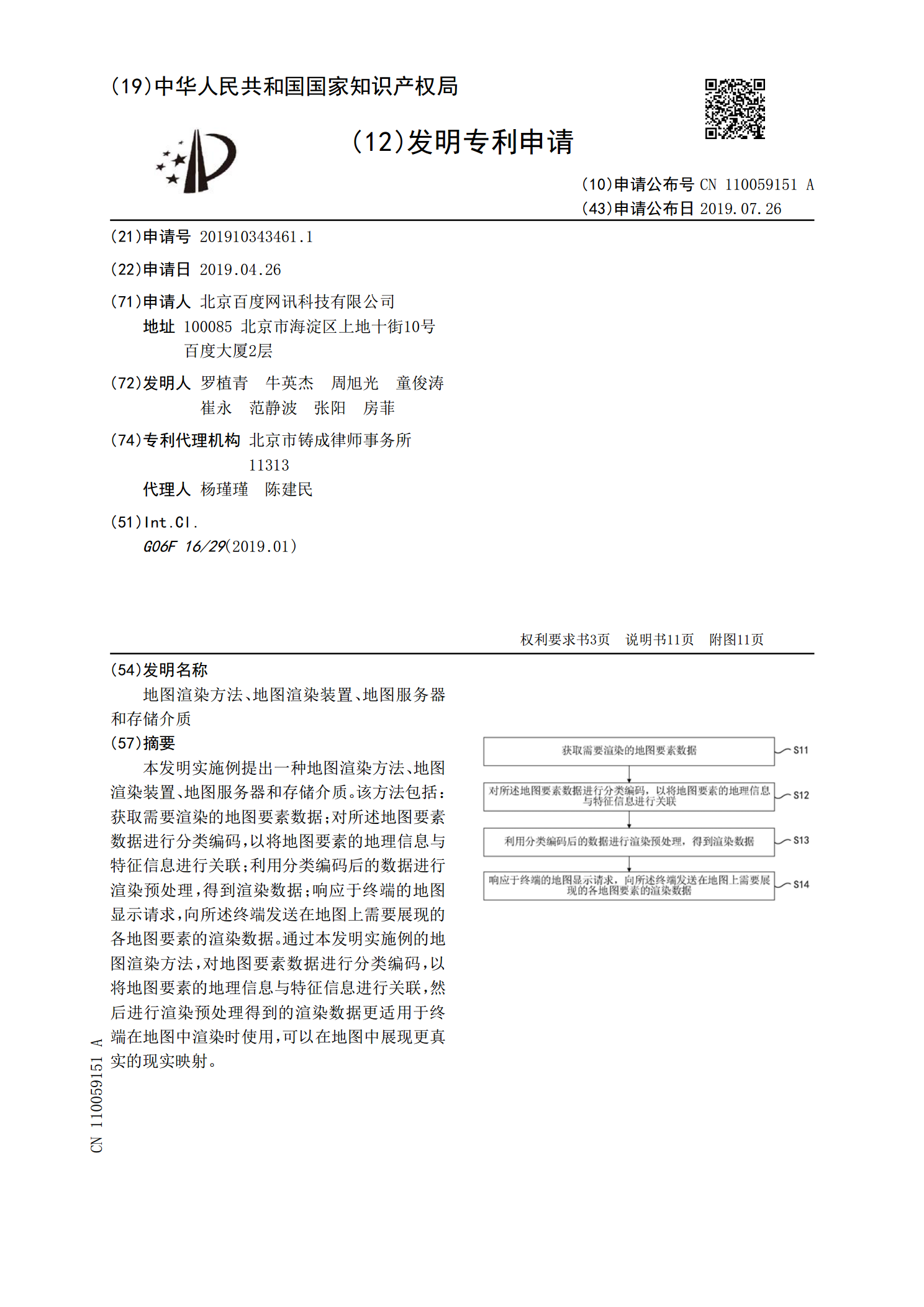
本发明实施例提出一种地图渲染方法、地图渲染装置、地图服务器和存储介质。该方法包括:获取需要渲染的地图要素数据;对所述地图要素数据进行分类编码,以将地图要素的地理信息与特征信息进行关联;利用分类编码后的数据进行渲染预处理,得到渲染数据;响应于终端的地图显示请求,向所述终端发送在地图上需要展现的各地图要素的渲染数据。通过本发明实施例的地图渲染方法,对地图要素数据进行分类编码,以将地图要素的地理信息与特征信息进行关联,然后进行渲染预处理得到的渲染数据更适用于终端在地图中渲染时使用,可以在地图中展现更真实的现实映
地图的渲染方法和装置、存储介质、电子装置.pdf
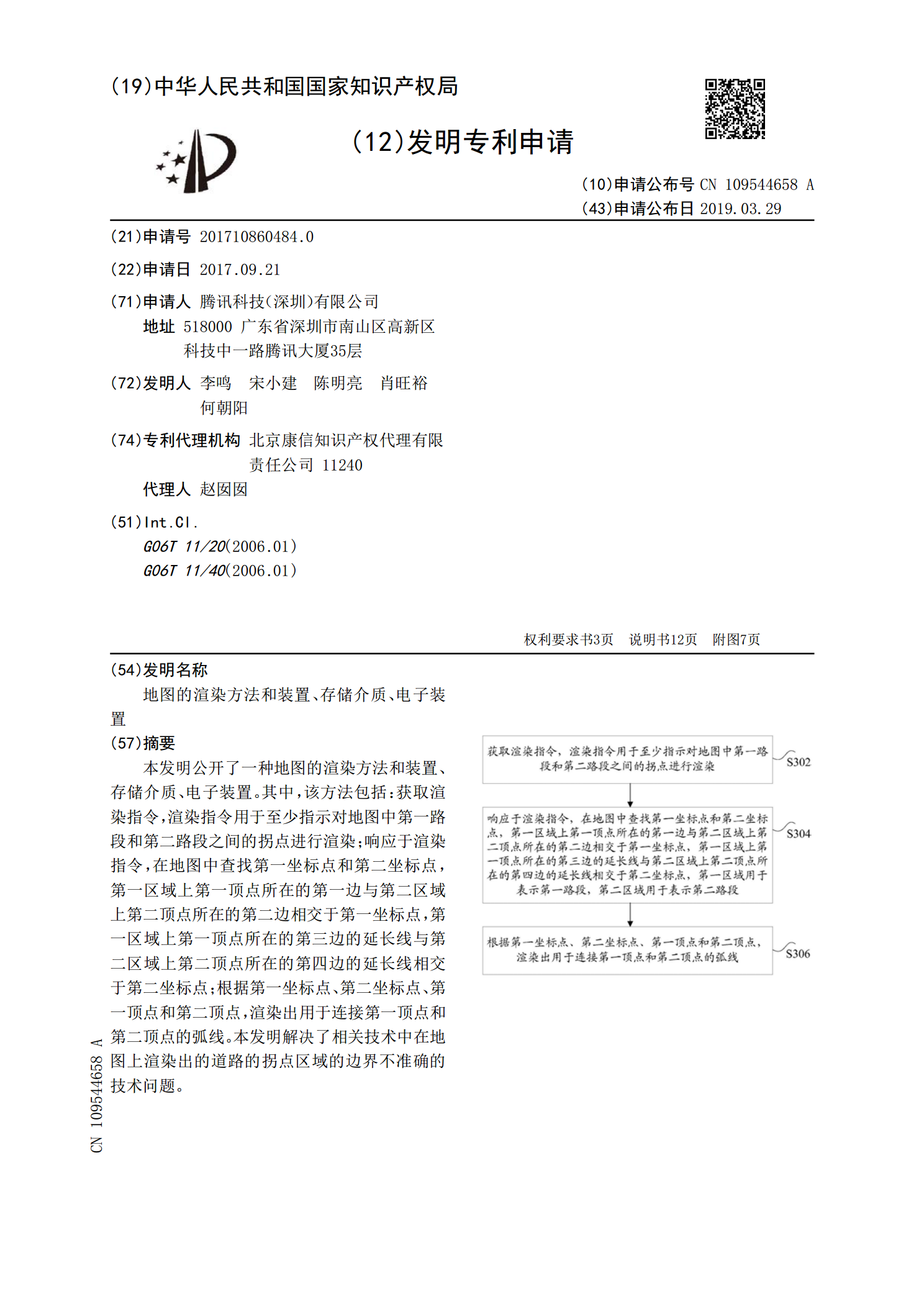
本发明公开了一种地图的渲染方法和装置、存储介质、电子装置。其中,该方法包括:获取渲染指令,渲染指令用于至少指示对地图中第一路段和第二路段之间的拐点进行渲染;响应于渲染指令,在地图中查找第一坐标点和第二坐标点,第一区域上第一顶点所在的第一边与第二区域上第二顶点所在的第二边相交于第一坐标点,第一区域上第一顶点所在的第三边的延长线与第二区域上第二顶点所在的第四边的延长线相交于第二坐标点;根据第一坐标点、第二坐标点、第一顶点和第二顶点,渲染出用于连接第一顶点和第二顶点的弧线。本发明解决了相关技术中在地图上渲染出的
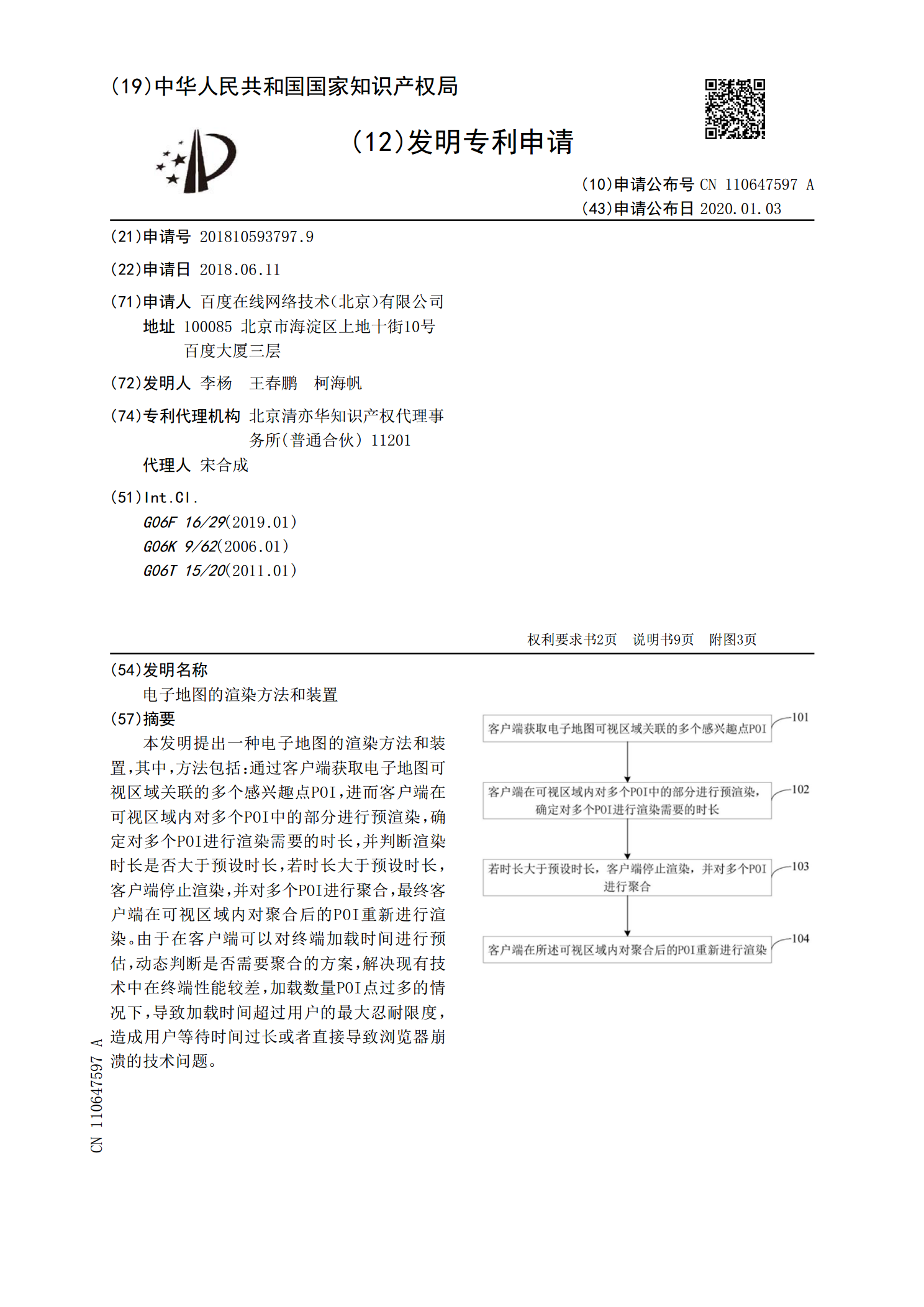
电子地图的渲染方法和装置.pdf
本发明提出一种电子地图的渲染方法和装置,其中,方法包括:通过客户端获取电子地图可视区域关联的多个感兴趣点POI,进而客户端在可视区域内对多个POI中的部分进行预渲染,确定对多个POI进行渲染需要的时长,并判断渲染时长是否大于预设时长,若时长大于预设时长,客户端停止渲染,并对多个POI进行聚合,最终客户端在可视区域内对聚合后的POI重新进行渲染。由于在客户端可以对终端加载时间进行预估,动态判断是否需要聚合的方案,解决现有技术中在终端性能较差,加载数量POI点过多的情况下,导致加载时间超过用户的最大忍耐限度,