
一种基于硅胶愈合模型的虚拟切割算法.pdf

映雁****魔王


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于硅胶愈合模型的虚拟切割算法.pdf
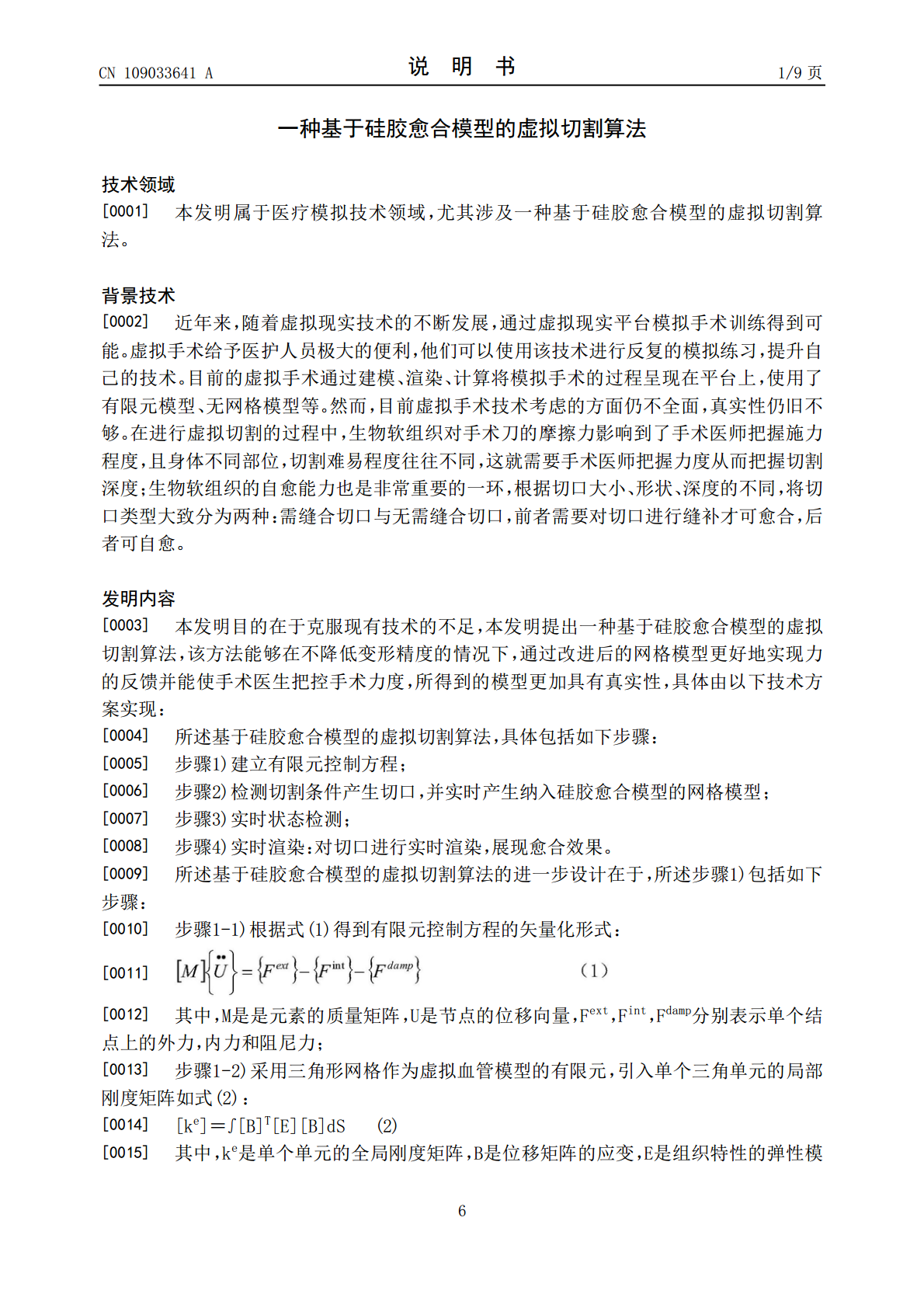
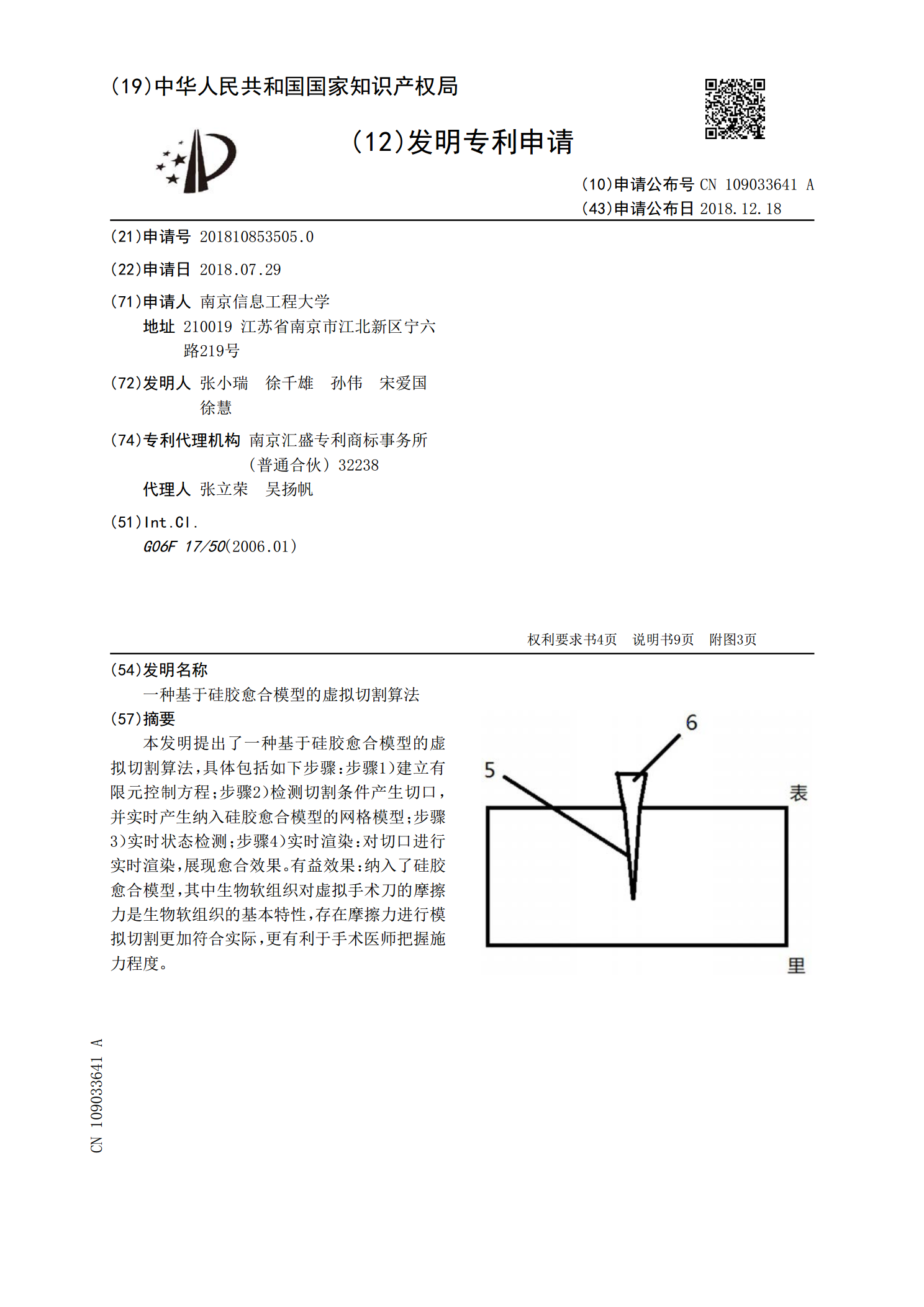
本发明提出了一种基于硅胶愈合模型的虚拟切割算法,具体包括如下步骤:步骤1)建立有限元控制方程;步骤2)检测切割条件产生切口,并实时产生纳入硅胶愈合模型的网格模型;步骤3)实时状态检测;步骤4)实时渲染:对切口进行实时渲染,展现愈合效果。有益效果:纳入了硅胶愈合模型,其中生物软组织对虚拟手术刀的摩擦力是生物软组织的基本特性,存在摩擦力进行模拟切割更加符合实际,更有利于手术医师把握施力程度。
一种基于磁性氧化模型的虚拟切割算法.pdf
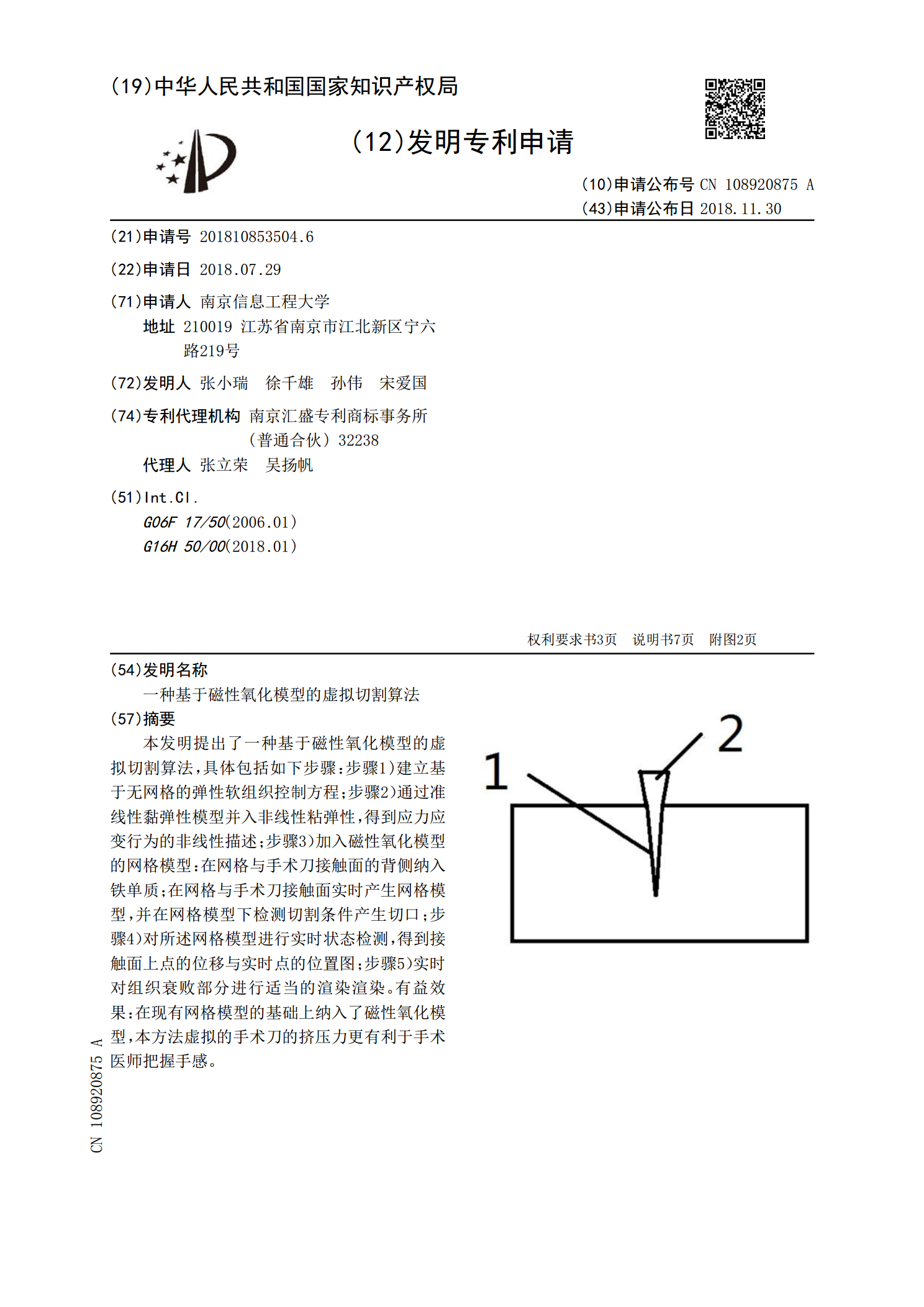
本发明提出了一种基于磁性氧化模型的虚拟切割算法,具体包括如下步骤:步骤1)建立基于无网格的弹性软组织控制方程;步骤2)通过准线性黏弹性模型并入非线性粘弹性,得到应力应变行为的非线性描述;步骤3)加入磁性氧化模型的网格模型:在网格与手术刀接触面的背侧纳入铁单质;在网格与手术刀接触面实时产生网格模型,并在网格模型下检测切割条件产生切口;步骤4)对所述网格模型进行实时状态检测,得到接触面上点的位移与实时点的位置图;步骤5)实时对组织衰败部分进行适当的渲染渲染。有益效果:在现有网格模型的基础上纳入了磁性氧化模型,
虚拟服装网格模型切割及参数化算法研究.pdf
浙江理工大学硕士学位论文虚拟服装网格模型切割及参数化算法研究姓名:金耀申请学位级别:硕士专业:计算机应用技术指导教师:李重20100312摘要服装CAD技术大大改变了传统服装行业的面貌,成为服装工业化生产不可或缺的利器。随着计算机技术的迅猛发展和服装个性化生产的迫切需求,3D服装CAD技术受到普遍关注,各项针对3D虚拟服装网格模型的研究工作蓬勃展开。虚拟服装模型的切割算法是其中一个研究方向,在服装曲面展平、款式自由编辑、虚拟立体裁剪等方面有着重要应用;而与此相关的网格参数化方法同样在服装CAD中扮演着重要

基于Bézier曲线的虚拟手术切割新算法.docx
基于Bézier曲线的虚拟手术切割新算法摘要:手术模拟是一种虚拟现实技术,可以让医学学生和医生在模拟环境下学习各种手术操作,提高手术技能。本文介绍了一种基于Bézier曲线的手术切割算法,该算法通过将受控曲线应用于手术切割模型中,确保了切割线的精确度和实时性。同时,我们对算法进行了测试并分析了其效率和精度。关键词:Bézier曲线、手术模拟、切割、精度、实时性引言虚拟手术模拟技术已经成为医学领域发展的重要趋势。虚拟手术模拟技术可以帮助医学学生以及医生练习各种手术,提高其技能,同时还可以减少真实手术环境下的

基于体模型优化的虚拟试衣算法.pptx
基于体模型优化的虚拟试衣算法目录添加目录项标题算法概述算法定义算法应用场景算法优缺点体模型优化技术体模型基本概念体模型优化方法体模型优化效果虚拟试衣算法实现算法流程关键技术实现算法效果评估实验结果与分析实验数据集实验结果展示结果分析结论与展望结论总结未来研究方向感谢观看