
一种基于模糊度评价的多通路Metropolis光线追踪自适应采样方法.pdf

一吃****永贺

1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于模糊度评价的多通路Metropolis光线追踪自适应采样方法.pdf
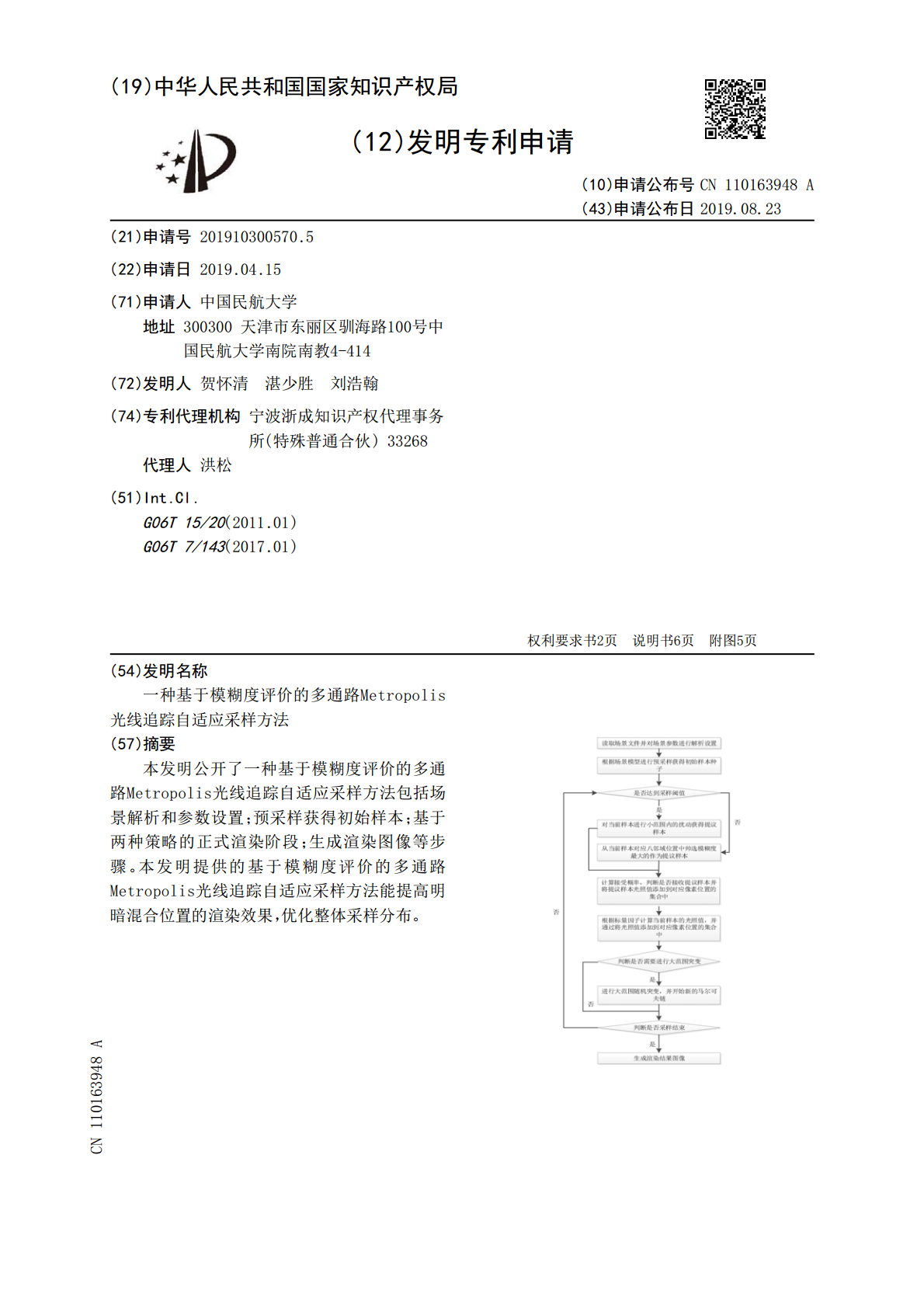
本发明公开了一种基于模糊度评价的多通路Metropolis光线追踪自适应采样方法包括场景解析和参数设置;预采样获得初始样本;基于两种策略的正式渲染阶段;生成渲染图像等步骤。本发明提供的基于模糊度评价的多通路Metropolis光线追踪自适应采样方法能提高明暗混合位置的渲染效果,优化整体采样分布。
一种Metropolis光线追踪自适应两阶段采样方法.pdf
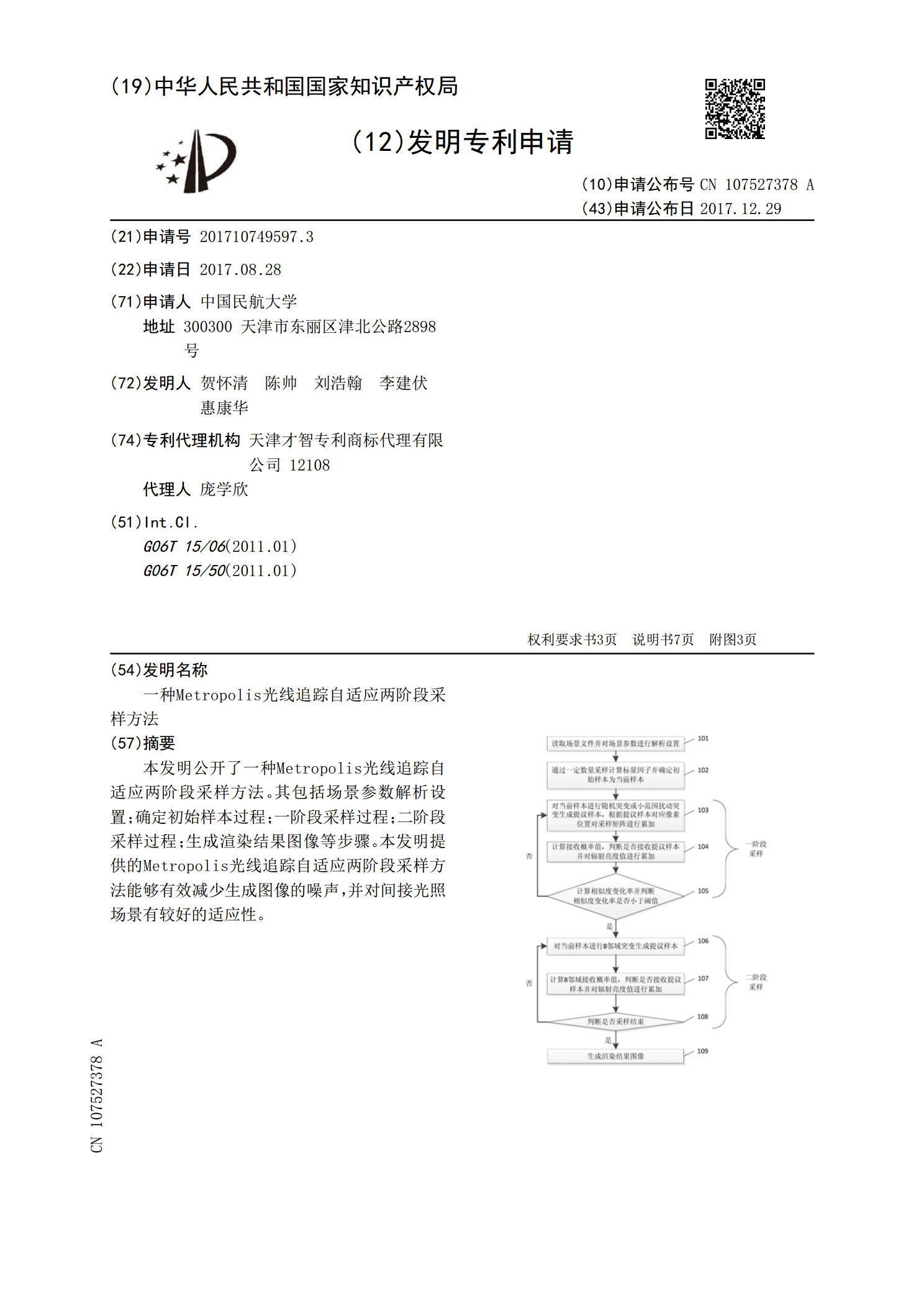
本发明公开了一种Metropolis光线追踪自适应两阶段采样方法。其包括场景参数解析设置;确定初始样本过程;一阶段采样过程;二阶段采样过程;生成渲染结果图像等步骤。本发明提供的Metropolis光线追踪自适应两阶段采样方法能够有效减少生成图像的噪声,并对间接光照场景有较好的适应性。

基于自适应光线采样的并行光路追踪方法.docx
基于自适应光线采样的并行光路追踪方法基于自适应光线采样的并行光路追踪方法摘要:光线追踪是计算机图形学中重要的渲染技术之一。然而,传统的光线采样方法往往会浪费计算资源,导致渲染效率低下。本论文提出了一种基于自适应光线采样的并行光路追踪方法,通过动态调整采样点的数量和位置,提高了渲染速度,并保持了高质量的渲染结果。实验结果表明,该方法在提高渲染效果的同时,具有很高的并行化能力。1.引言光线追踪是一种基于物理原理的渲染方法,模拟了光在场景中的传播和交互过程。通过追踪每条光线的传播路径,可以得到高质量的渲染结果。

基于方差过滤的改进多通路Metropolis光线传输算法.docx
基于方差过滤的改进多通路Metropolis光线传输算法基于方差过滤的改进多通路Metropolis光线传输算法摘要:在计算机生成的三维图形中,光线传输算法是一个非常重要的技术。而Metropolis光线传输算法则是一种重要的MonteCarlo光线追踪算法。本文针对该算法中缺陷,提出了基于方差过滤的改进多通路Metropolis光线传输算法。实验结果表明,这种算法能够更加准确地计算光线传输。1.简介光线传输是计算机图形学中非常重要的技术之一,它用于计算三维场景中光线的传输情况。在光线传输算法中,光线从相

用于光线追踪应用的基于网格的光采样.pdf
将光照效果合并到计算机生成的图形中的设备、系统和技术。在至少一个实施例中,通过细分虚拟区域来渲染包括多个光的虚拟场景,并且在对应于虚拟区域的细分的记录中存储指示基于随机模型选择的虚拟区域中的一个或更多个光的信息。基于存储在细分中的光信息渲染细分附近的像素。