
一种点云数据三维可视化渲染方法与计算方法.pdf

是你****盟主

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种点云数据三维可视化渲染方法与计算方法.pdf
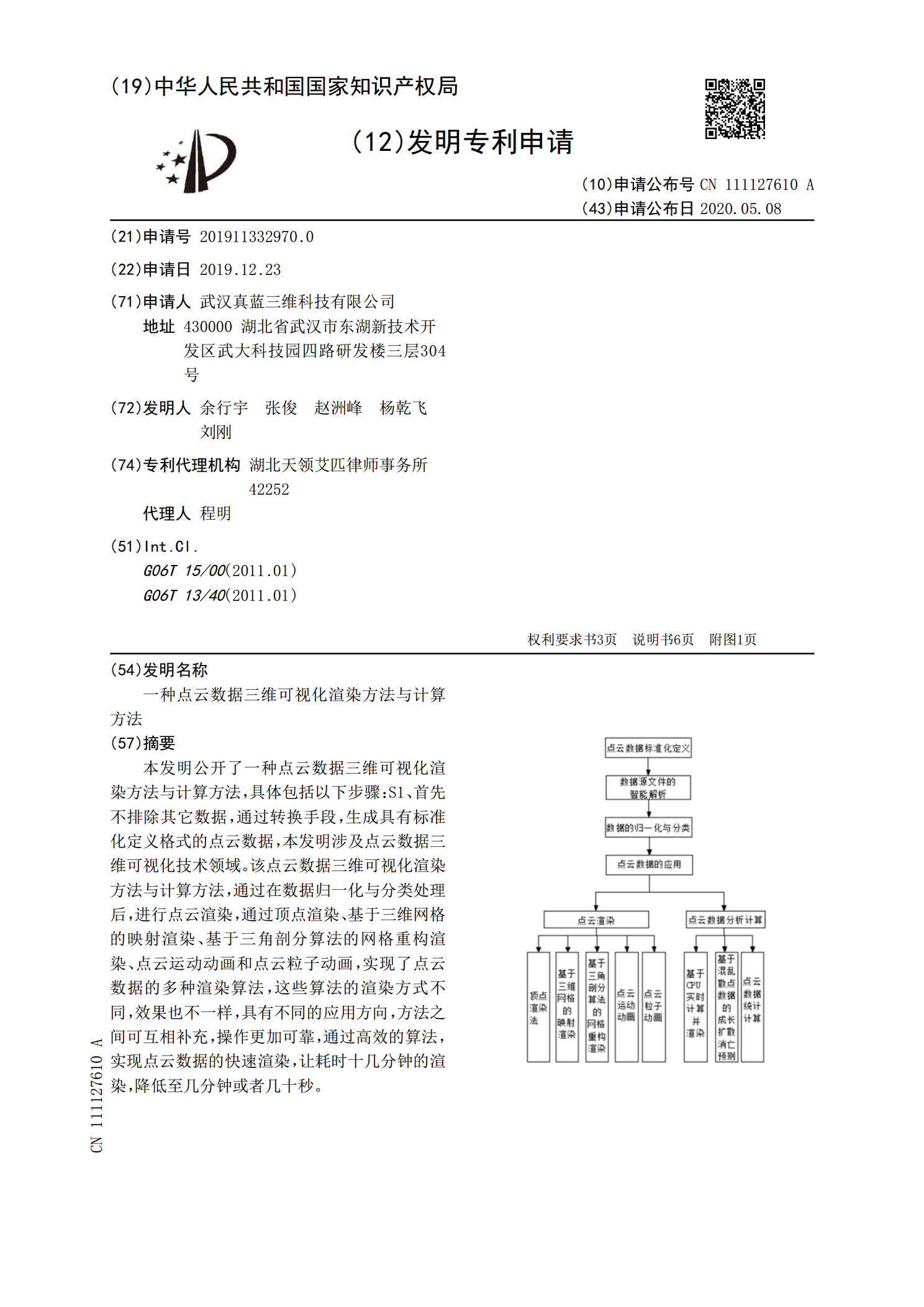
本发明公开了一种点云数据三维可视化渲染方法与计算方法,具体包括以下步骤:S1、首先不排除其它数据,通过转换手段,生成具有标准化定义格式的点云数据,本发明涉及点云数据三维可视化技术领域。该点云数据三维可视化渲染方法与计算方法,通过在数据归一化与分类处理后,进行点云渲染,通过顶点渲染、基于三维网格的映射渲染、基于三角剖分算法的网格重构渲染、点云运动动画和点云粒子动画,实现了点云数据的多种渲染算法,这些算法的渲染方式不同,效果也不一样,具有不同的应用方向,方法之间可互相补充,操作更加可靠,通过高效的算法,实现点
一种大数据可视化三维GIS云渲染项目生成系统与方法.pdf
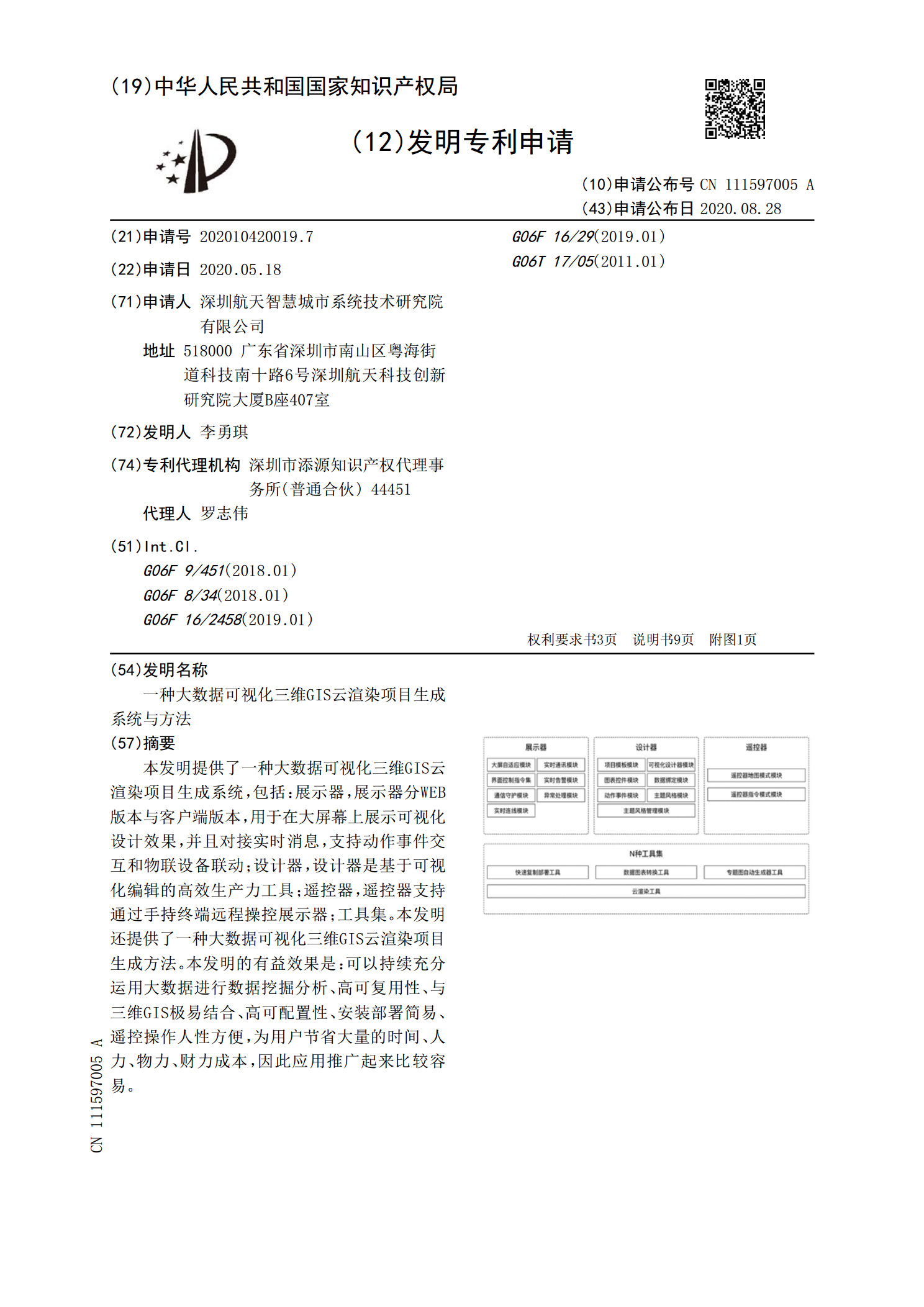
本发明提供了一种大数据可视化三维GIS云渲染项目生成系统,包括:展示器,展示器分WEB版本与客户端版本,用于在大屏幕上展示可视化设计效果,并且对接实时消息,支持动作事件交互和物联设备联动;设计器,设计器是基于可视化编辑的高效生产力工具;遥控器,遥控器支持通过手持终端远程操控展示器;工具集。本发明还提供了一种大数据可视化三维GIS云渲染项目生成方法。本发明的有益效果是:可以持续充分运用大数据进行数据挖掘分析、高可复用性、与三维GIS极易结合、高可配置性、安装部署简易、遥控操作人性方便,为用户节省大量的时间、
一种点云数据的处理方法及装置和点云渲染方法及装置.pdf
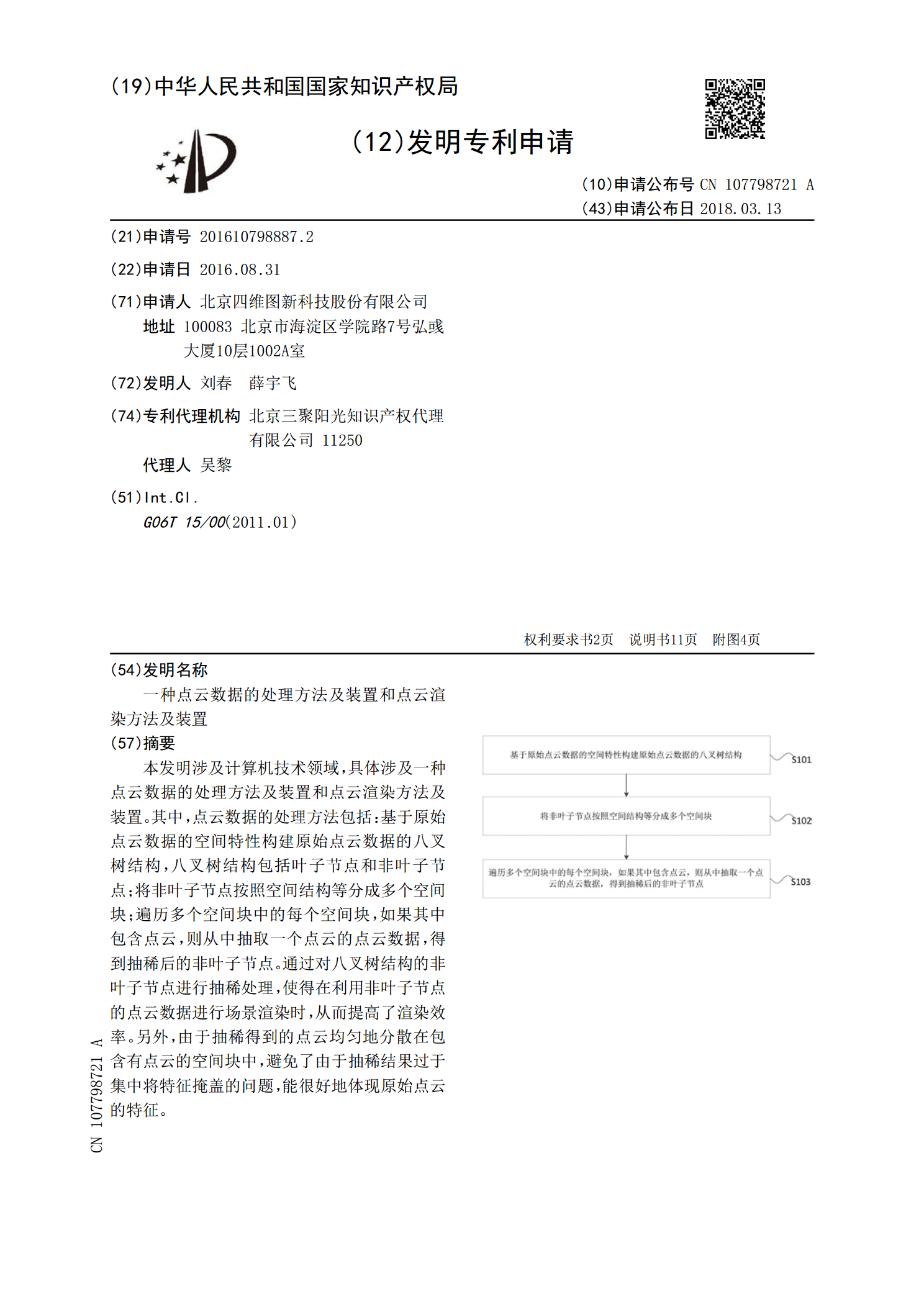
本发明涉及计算机技术领域,具体涉及一种点云数据的处理方法及装置和点云渲染方法及装置。其中,点云数据的处理方法包括:基于原始点云数据的空间特性构建原始点云数据的八叉树结构,八叉树结构包括叶子节点和非叶子节点;将非叶子节点按照空间结构等分成多个空间块;遍历多个空间块中的每个空间块,如果其中包含点云,则从中抽取一个点云的点云数据,得到抽稀后的非叶子节点。通过对八叉树结构的非叶子节点进行抽稀处理,使得在利用非叶子节点的点云数据进行场景渲染时,从而提高了渲染效率。另外,由于抽稀得到的点云均匀地分散在包含有点云的空间
云渲染三维可视化实现方法及系统.pdf
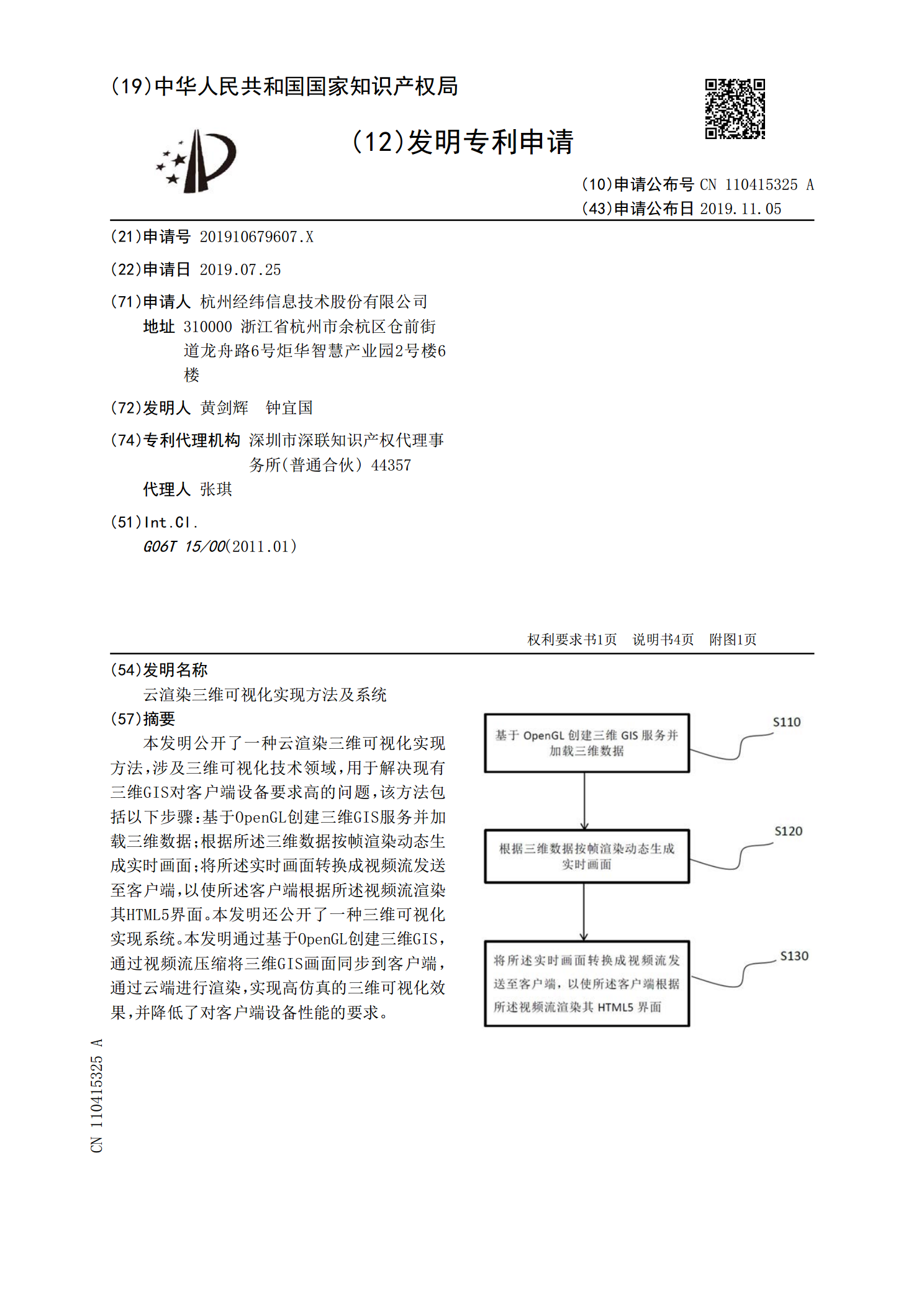
本发明公开了一种云渲染三维可视化实现方法,涉及三维可视化技术领域,用于解决现有三维GIS对客户端设备要求高的问题,该方法包括以下步骤:基于OpenGL创建三维GIS服务并加载三维数据;根据所述三维数据按帧渲染动态生成实时画面;将所述实时画面转换成视频流发送至客户端,以使所述客户端根据所述视频流渲染其HTML5界面。本发明还公开了一种三维可视化实现系统。本发明通过基于OpenGL创建三维GIS,通过视频流压缩将三维GIS画面同步到客户端,通过云端进行渲染,实现高仿真的三维可视化效果,并降低了对客户端设备性能

一种海量点云数据多视图渲染方法.pdf
本发明提供一种海量点云数据多视图渲染方法,包括以下步骤:对原始点云数据进行多尺度自适应分块和八叉树索引构建;根据视口范围对各个视图分别筛选需要加载的八叉树,并确定八叉树加载的层次细节模型层级;层次细节模型加载线程加载层次细节模型数据,得到可供渲染的点云模型,将可供渲染的点云模型放入模型共享队列;各个视图根据自身需要加载的八叉树,从模型共享队列中查找视图范围内的可供渲染的点云模型,合并可供渲染的点云模型到场景,同时移除过期的可供渲染的点云模型;删除过期的可供渲染的点云模型。本发明可以解决对于海量点云数据进行