
基于智慧城市的多模型融合方法及系统.pdf

Jo****63

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于智慧城市的多模型融合方法及系统.pdf
本发明提供基于智慧城市的多模型融合方法、系统、电子设备及存储介质,方法包括:根据航拍摄影图像,生成BIM模型和倾斜摄影模型;通过B/S端方式且采用GUP渲染方式对BIM模型和倾斜摄影模型进行渲染;对渲染后的BIM模型和倾斜摄影模型进行融合,得到融合后的实景三维模型;根据实时采集的室内外移动目标的坐标点、移动轨迹和属性信息,构建移动目标的实时感知模型,将构建的移动目标的实时感知模型融合于实景三维模型中并显示。本发明能够将多种模型进行融合,通过B/S端且基于GPU与服务器渲染技术,将倾斜摄影数据、BIM数据模

一种基于多源数据融合的智慧城市优化管理方法和系统.pdf
本发明涉及电数字数据处理技术领域,具体涉及一种基于多源数据融合的智慧城市优化管理方法和系统。方法包括:基于各监测点在当前时间段内前后两个采集时刻的监测数据的差值构建初始直方图;对各监测点在当前时间段内前后两个采集时刻的监测数据的差值进行转换获得第一差值直方图,计算第一差值直方图对应的正态分布程度以及转换前后数据分布特征的一致性,进而获得对应的目标直方图;根据目标直方图、各监测点当前时刻的监测数据、各监测点的预设距离内的监测点当前时刻的监测数据,计算各监测点当前时刻监测数据的异常程度,进而获得目标监测数据,

基于多目标优化选择策略的多模型融合旅游推荐方法及其系统.pdf
本发明公开了一种基于多目标优化选择策略的多模型融合旅游推荐方法,包括以下步骤:S1:选取旅游推荐问题中的两个或两个以上的单模型,并得出每个单推荐模型的推荐结果,得到待优化总集合;S2:将多模型融合推荐问题建模为多目标优化问题;S3:将待优化总集合构建为旅游推荐方案的多个待优化子集合;S4:利用多目标优化方法计算出所有待优化子集合中个体的排序得到优化后子集合;S5:合并所有优化后子集合,根据需求在优化后总集合中选取前k个景点作为模型的最终输出结果,即得出最终的旅游推荐结果。还公开了一种基于多目标优化选择策略

基于多模型数据融合的量子加密通信方法.pdf
本发明公开了一种基于多模型数据融合的量子加密通信方法,由云服务器、多个本地节点组成,本地节点之间建立独立的量子信道互联,不同本地节点分别存储不同异构数据,以本地节点中的任何一个节点的隐含层参数为初始模型参数,在云服务器进行模型训练后形成新的参数,分发至各本地节点后,进行本地数据的多目标学习训练,各本地节点将训练后的隐含层参数返回至云服务器,进行迭代后直至所有本地节点数据均遍历训练完成。本发明通过模型训练的方式对不同端的数据进行训练,确保了多地不同数据在不共享的情况下能够训练得出相应的参数,整体上优化了模型
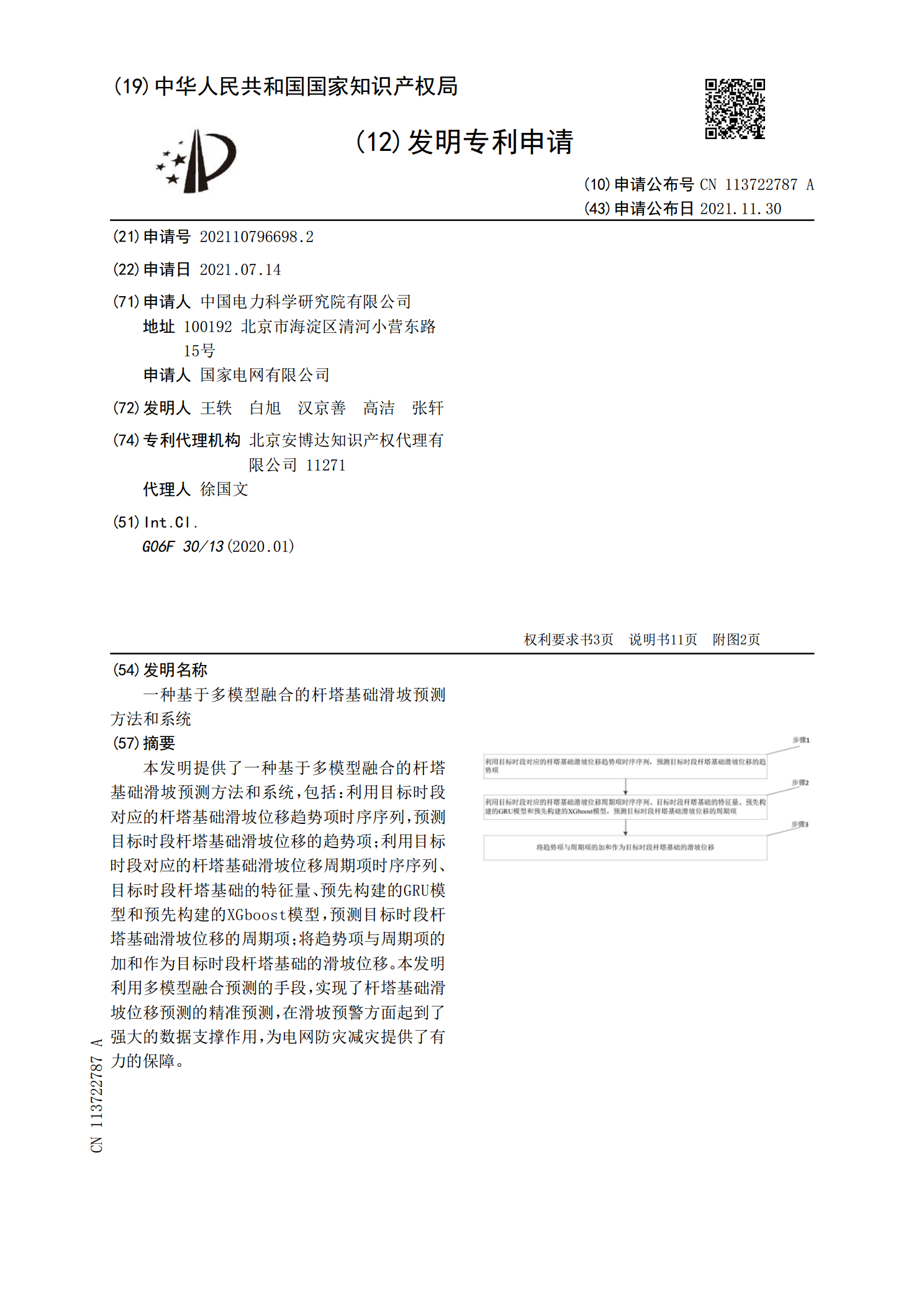
一种基于多模型融合的杆塔基础滑坡预测方法和系统.pdf
本发明提供了一种基于多模型融合的杆塔基础滑坡预测方法和系统,包括:利用目标时段对应的杆塔基础滑坡位移趋势项时序序列,预测目标时段杆塔基础滑坡位移的趋势项;利用目标时段对应的杆塔基础滑坡位移周期项时序序列、目标时段杆塔基础的特征量、预先构建的GRU模型和预先构建的XGboost模型,预测目标时段杆塔基础滑坡位移的周期项;将趋势项与周期项的加和作为目标时段杆塔基础的滑坡位移。本发明利用多模型融合预测的手段,实现了杆塔基础滑坡位移预测的精准预测,在滑坡预警方面起到了强大的数据支撑作用,为电网防灾减灾提供了有力的