
基于共享显存优化的光子收集方法和光子映射渲染方法.pdf

努力****弘毅


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于共享显存优化的光子收集方法和光子映射渲染方法.pdf
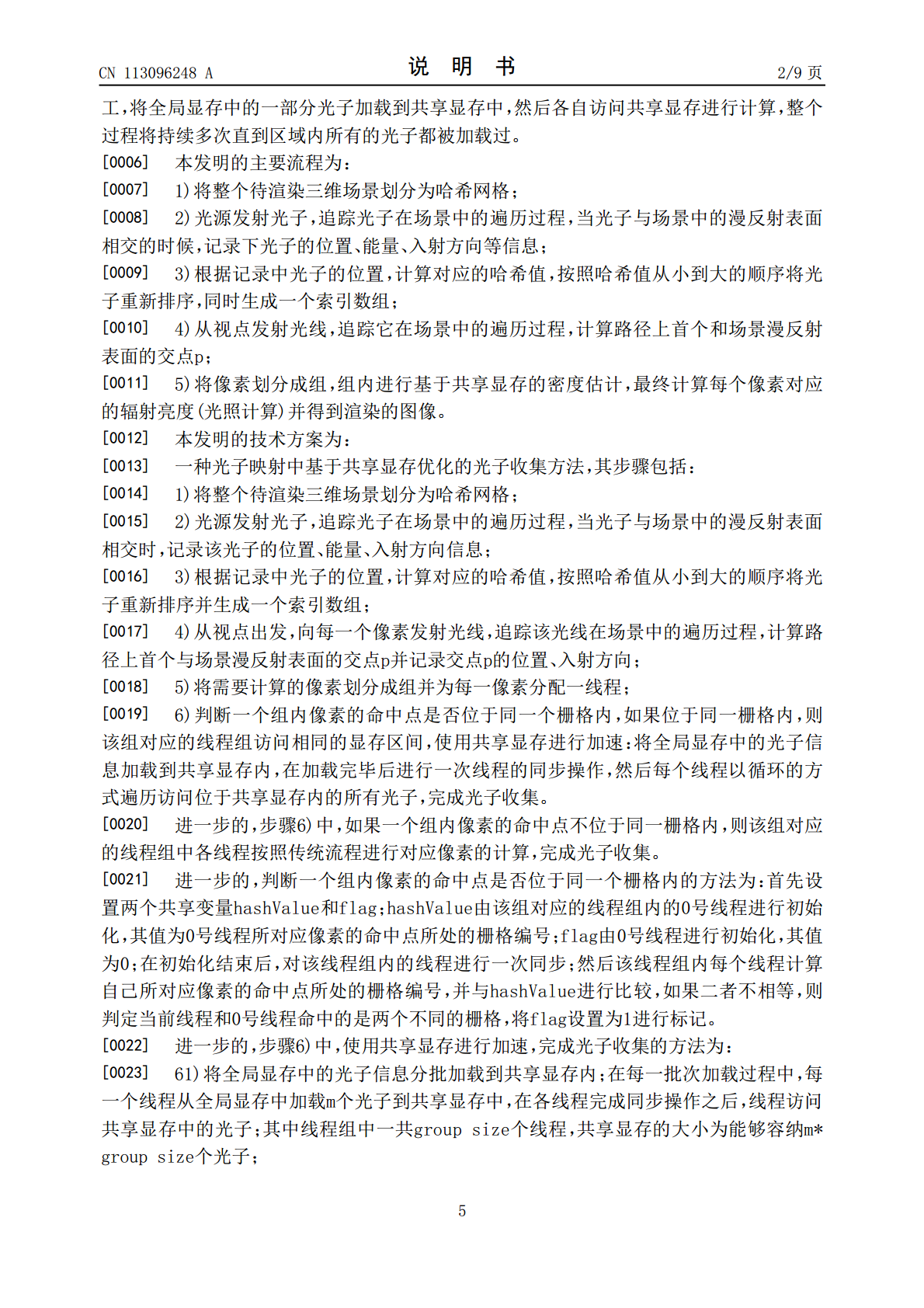
本发明公开了一种基于共享显存优化的光子收集方法和光子映射渲染方法。本发明的光子收集方法,其步骤包括:1)将整个待渲染三维场景划分为哈希网格;2)光源发射光子,当光子与场景中的漫反射表面相交时,记录该光子的位置、能量、入射方向信息;3)根据记录中光子的位置,计算对应的哈希值,按照哈希值从小到大的顺序将光子重新排序并生成一个索引数组;4)从视点出发,向每一个像素发射光线,计算路径上首个与场景漫反射表面的交点p并记录交点p的位置、入射方向;5)将需要计算的像素划分成组并为每一像素分配一线程;6)判断一个组内像素
基于光子重采样的随机渐近光子映射图像渲染方法及系统.pdf
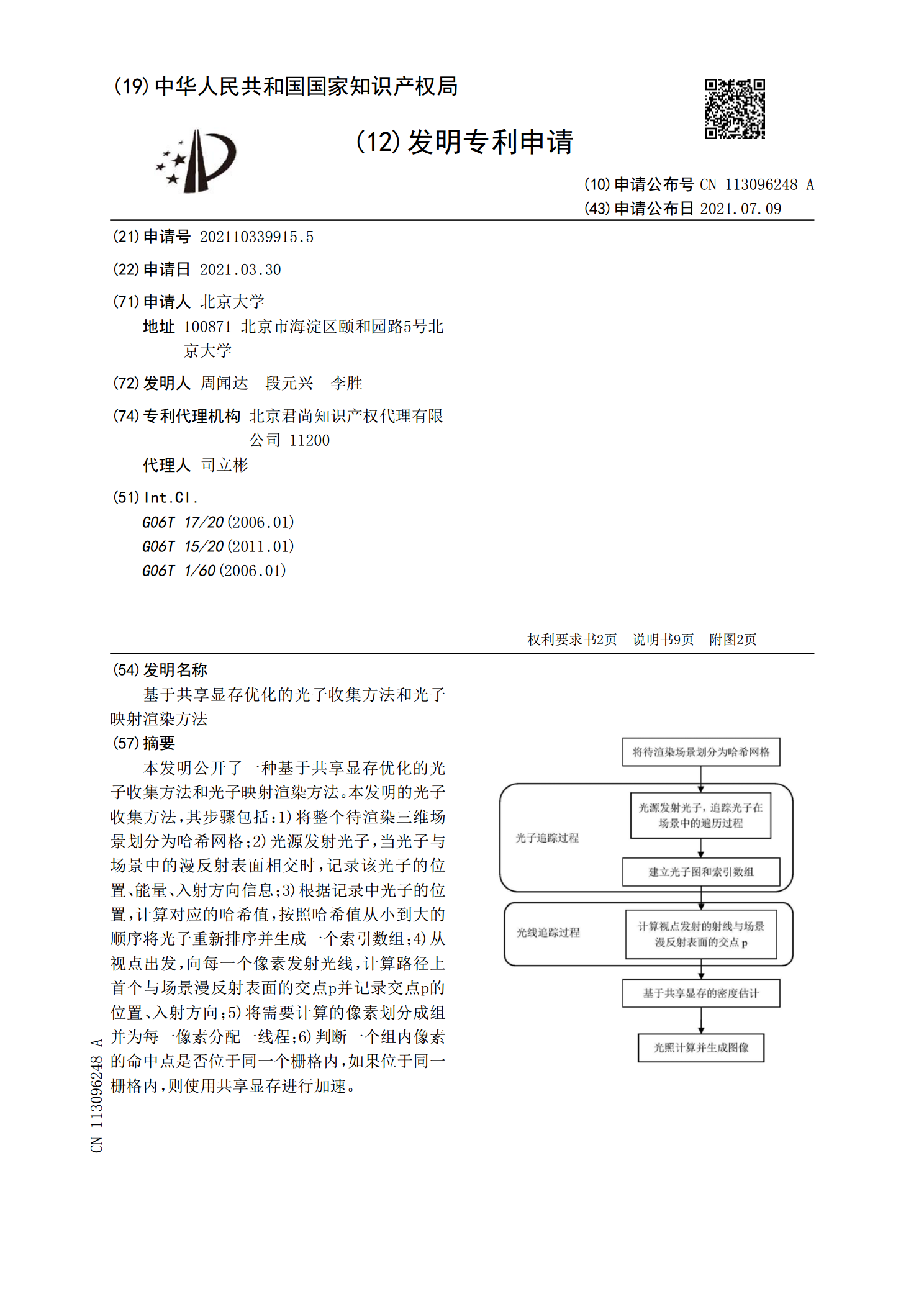
本公开公开了基于光子重采样的随机渐近光子映射图像渲染方法及系统,从视点发射第一光线,记录第一光线与场景物体的碰撞点位置;从光源发射第二光线,得到光子图;将光子图划分为若干个连续的图像子块,计算每个图像子块内碰撞点距离误差值和光子数误差值;在着色阶段,遍历碰撞点;首次执行时,对每一个碰撞点,根据设定半径进行光子采样;在非首次执行时,对每一个碰撞点,根据碰撞点距离误差值和光子数误差值,计算碰撞点的若干个新的采样半径,利用若干个新的采样半径,对当前图像子块内碰撞点新的采样半径内的光子进行重新采样;当所有的碰撞点

一种基于神经网络的光子映射渲染方法和系统.pdf
本发明涉及一种基于神经网络的光子映射渲染方法和系统。该方法包括:1)采用光子映射方法生成k张不同渲染质量的彩色效果图;2)将多组由k张不同渲染质量的彩色效果图构成的训练集输入神经网络进行训练得到神经网络模型;3)基于所述神经网络模型合成全局光照明渲染图像。与现有的渐进式光子映射方法相比,本发明只需要通过由几次迭代的光子映射所产生的中间粗糙结果,就可以藉由本发明提出的神经网络,推测合成渐进式光子映射收敛的渲染结果,从而解决了传统渐进式光子映射方法需要非常耗时的大量迭代才能生成较为理想的渲染结果的问题。

一种基于样本消除的渐进式光子映射优化方法.pdf
本发明公开了一种基于样本消除的渐进式光子映射优化方法,包括光线跟踪阶段;光子跟踪阶段;光子消除阶段;渲染成像阶段:遍历着色点,查询着色点的光子搜索半径范围内且在光子图中的光子,利用着色点对屏幕空间的贡献参数计算着色点的贡献颜色,并将贡献颜色返回给屏幕空间以形成渲染图像;光子渲染迭代:缩小着色点的光子搜索半径范围,重复光子跟踪阶段至渲染成像阶段,直至达到设定的迭代渲染次数,将所有形成的渲染图像累加后求平均,得到最终渲染图像。本发明具有易实施,方法简单,蓝噪声属性好的特点。
一种基于光子映射的全局光照方法.pdf
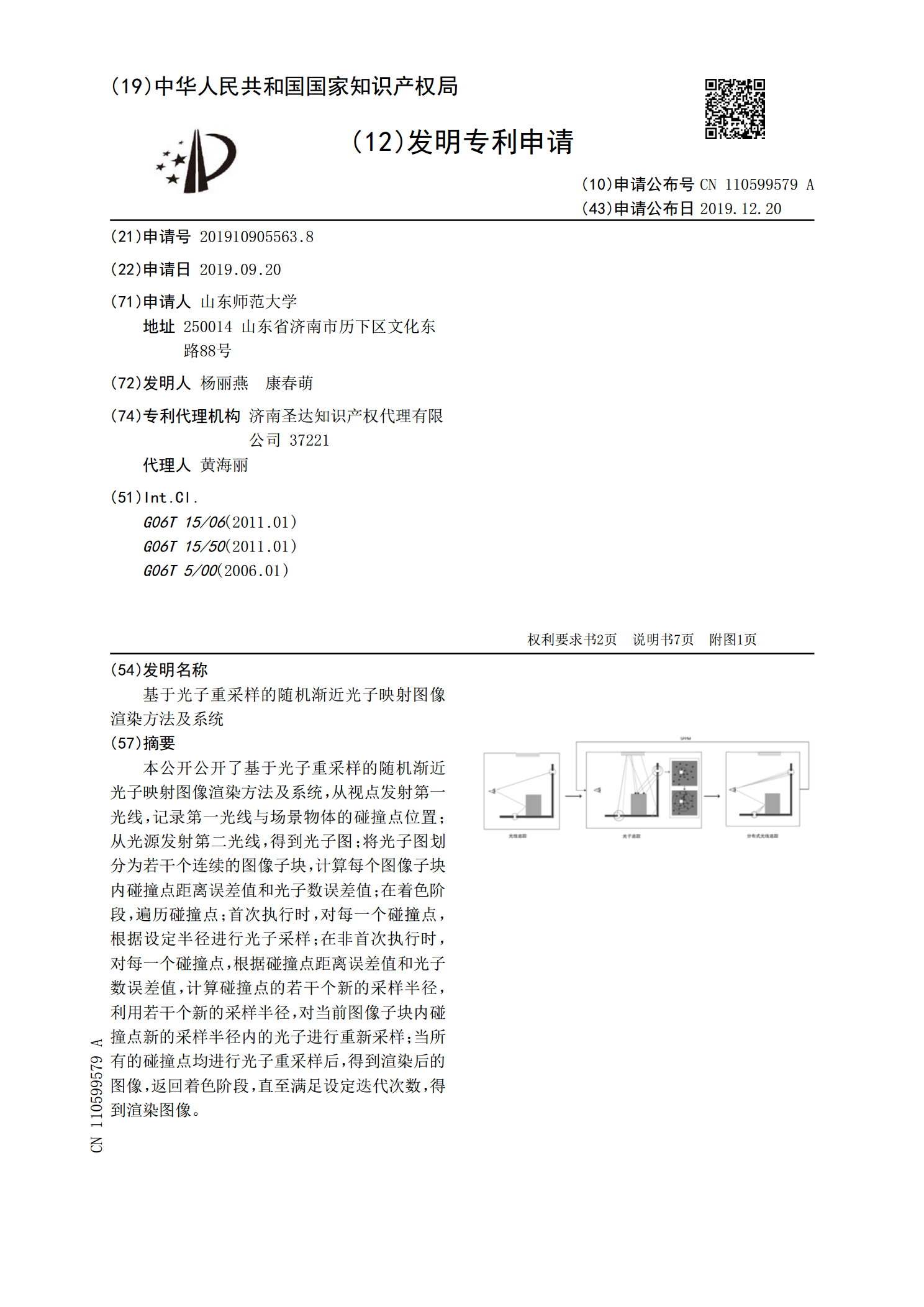
本发明公开了一种新的基于光子映射的全局光照方法,本发明属于图像处理技术领域。本发明方法的步骤主要包括:(1)光源向场景随机发射光子;(2)判断发射后的光子状态;(3)根据物体表面的信息递归跟踪光子;(4)保存光子信息;(5)进行渲染场景,包括将蒙特卡罗反向追踪方法与原光子映射方法相结合使用来进行渲染场景。使用本发明的技术方案,可以使得运行速度、渲染效果,以及使用的存储空间等方面得到一定的改进。