
一种基于多视角特征的工件识别方法和装置.pdf

景山****魔王

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于多视角特征的工件识别方法和装置.pdf
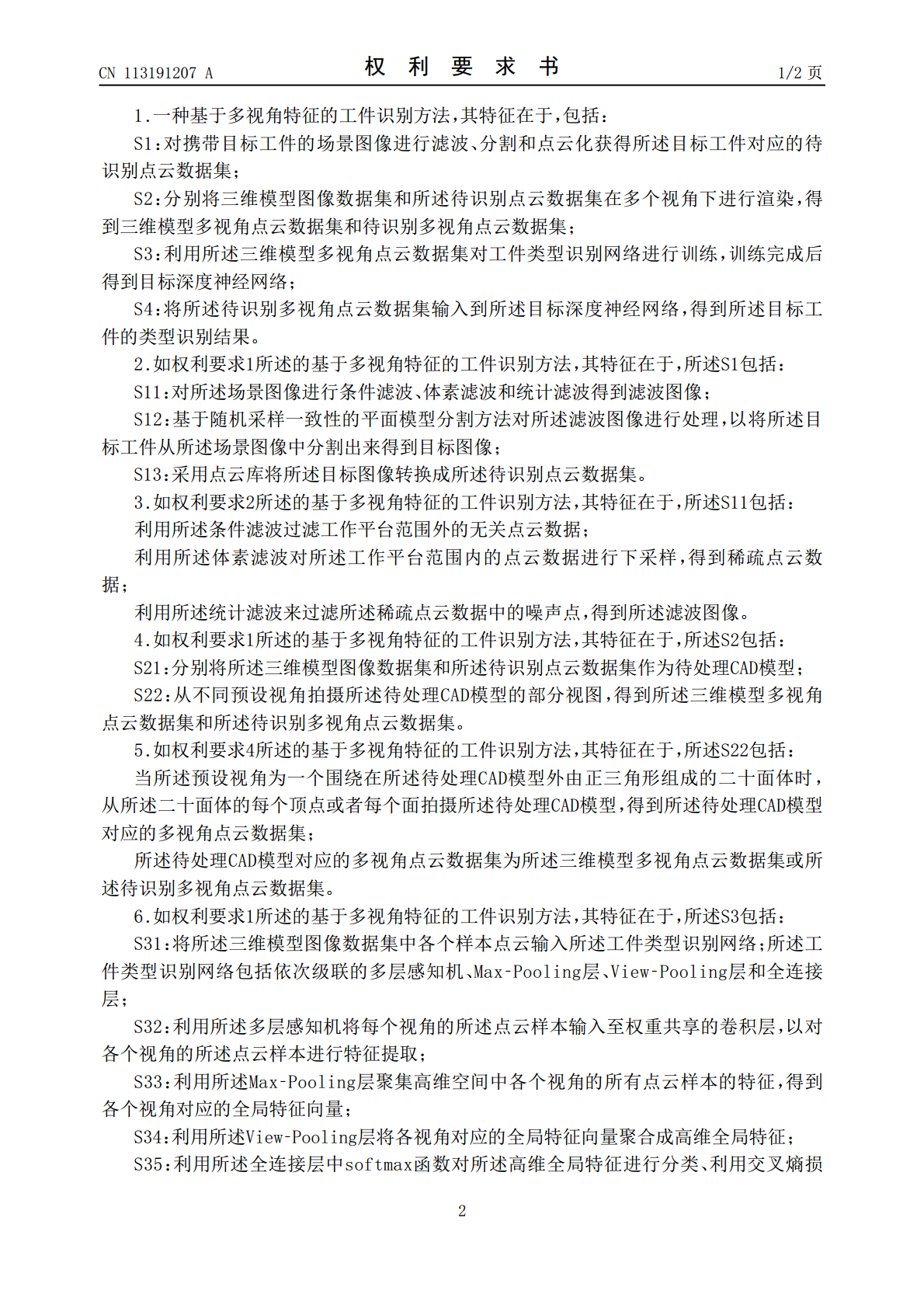
本发明公开了一种基于多视角特征的工件识别方法和装置,属于图像数据处理技术领域,所述方法包括:S1:对携带目标工件的场景图像进行滤波、分割和点云化获得所述目标工件对应的待识别点云数据集;S2:分别将三维模型图像数据集和所述待识别点云数据集在多个视角下进行渲染,得到三维模型多视角点云数据集和待识别多视角点云数据集;S3:利用所述三维模型多视角点云数据集对工件类型识别网络进行训练,训练完成后得到目标深度神经网络;S4:将所述待识别多视角点云数据集输入到所述目标深度神经网络,得到所述目标工件的类型识别结果。本发明

基于多视角特征的车型识别方法.docx
基于多视角特征的车型识别方法摘要:车型识别在智能交通系统中具有重要的应用价值,本文提出了一种基于多视角特征的车型识别方法。首先,采用三维点云数据获取车辆外部形状,在此基础上构建车辆三维模型。然后,通过多个摄像机拍摄车辆不同视角实现多视角特征获取,对特征向量进行简单处理后,使用卷积神经网络进行特征分类。实验结果表明,本文的方法具有较高的识别率和稳定性,适用于智能交通系统中车型识别任务。关键词:车型识别;多视角特征;三维点云数据;卷积神经网络1.引言随着智能交通系统的不断发展,车型识别技术受到了越来越广泛的关
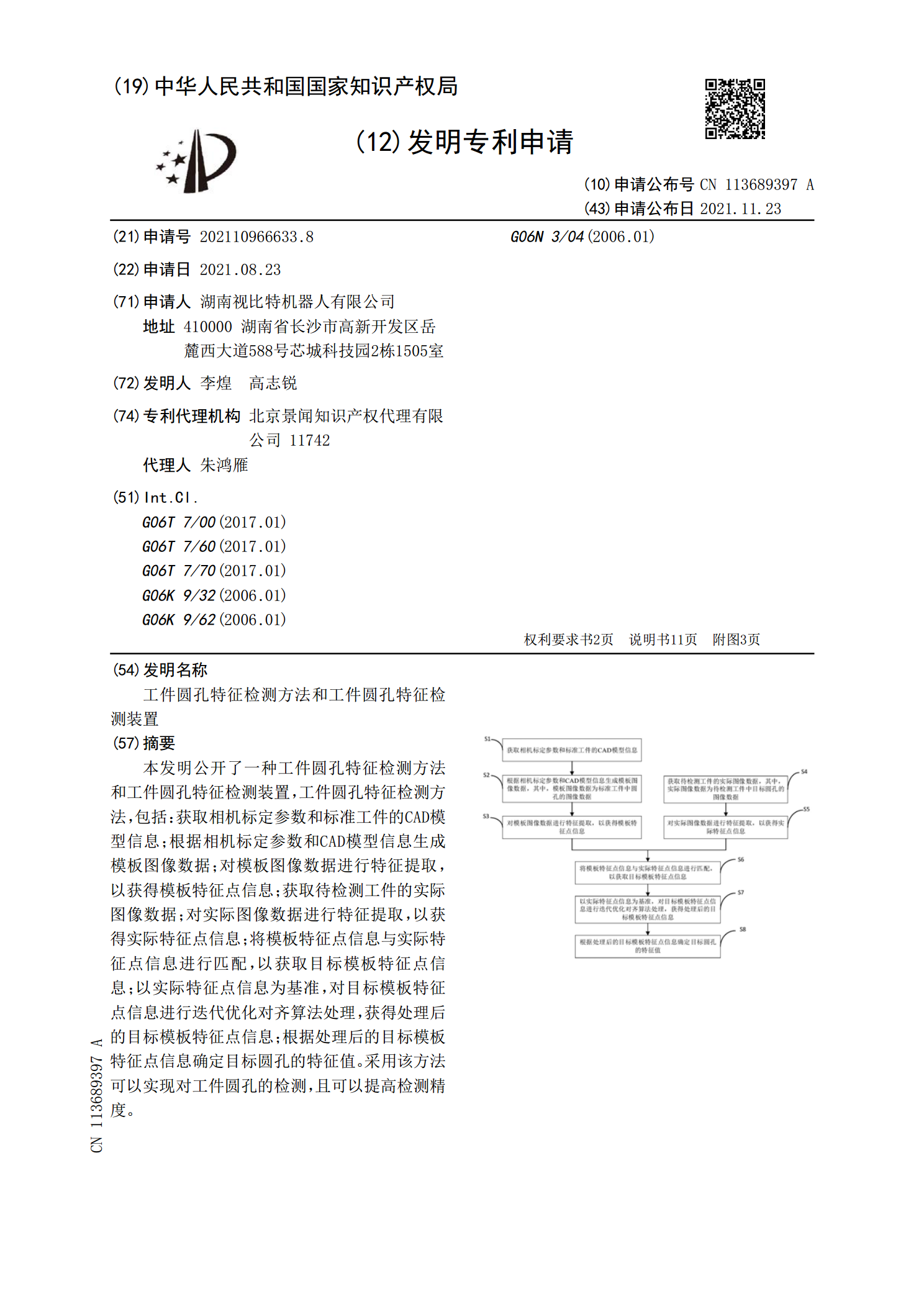
工件圆孔特征检测方法和工件圆孔特征检测装置.pdf
本发明公开了一种工件圆孔特征检测方法和工件圆孔特征检测装置,工件圆孔特征检测方法,包括:获取相机标定参数和标准工件的CAD模型信息;根据相机标定参数和CAD模型信息生成模板图像数据;对模板图像数据进行特征提取,以获得模板特征点信息;获取待检测工件的实际图像数据;对实际图像数据进行特征提取,以获得实际特征点信息;将模板特征点信息与实际特征点信息进行匹配,以获取目标模板特征点信息;以实际特征点信息为基准,对目标模板特征点信息进行迭代优化对齐算法处理,获得处理后的目标模板特征点信息;根据处理后的目标模板特征点信

基于多尺度和特征融合的肺癌识别方法.docx
基于多尺度和特征融合的肺癌识别方法基于多尺度和特征融合的肺癌识别方法摘要:肺癌是一种常见且致命的恶性肿瘤,及早准确地识别肺癌对于提高患者的生存率至关重要。为了解决肺癌识别中的挑战,本论文提出了一种基于多尺度和特征融合的肺癌识别方法。该方法通过将不同尺度的图像特征进行融合,旨在提高肺癌识别的准确性和性能。实验结果表明,所提出的方法在肺癌识别中取得了优秀的效果。1.引言肺癌是世界范围内较常见的恶性肿瘤之一,其死亡率高且预后不良。早期肺癌的准确识别对患者的治疗和生存率至关重要。然而,由于肺癌的复杂性和多样性,肺
基于流量特征的应用类型识别方法和装置.pdf
本申请提供基于流量特征的应用类型识别方法和装置,方法包括:基于维度及权重均不同的卷积核,分别对目标应用运行时产生的双向会话流量对应的多类流量特征数据进行特征提取,得到各类所述流量特征数据各自对应的特征结果数据;根据各个所述特征结果数据及预设的全连接层识别得到所述目标应用的应用类型。本申请能够有效提高根据流量特征识别应用类型的准确性及有效性,能够降低识别流量所属的应用类型的资源,并能够有效提高流量类型的识别效率。