
一种基于八叉树索引的海量点云分层实时渲染方法.pdf

醉香****mm

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于八叉树索引的海量点云分层实时渲染方法.pdf
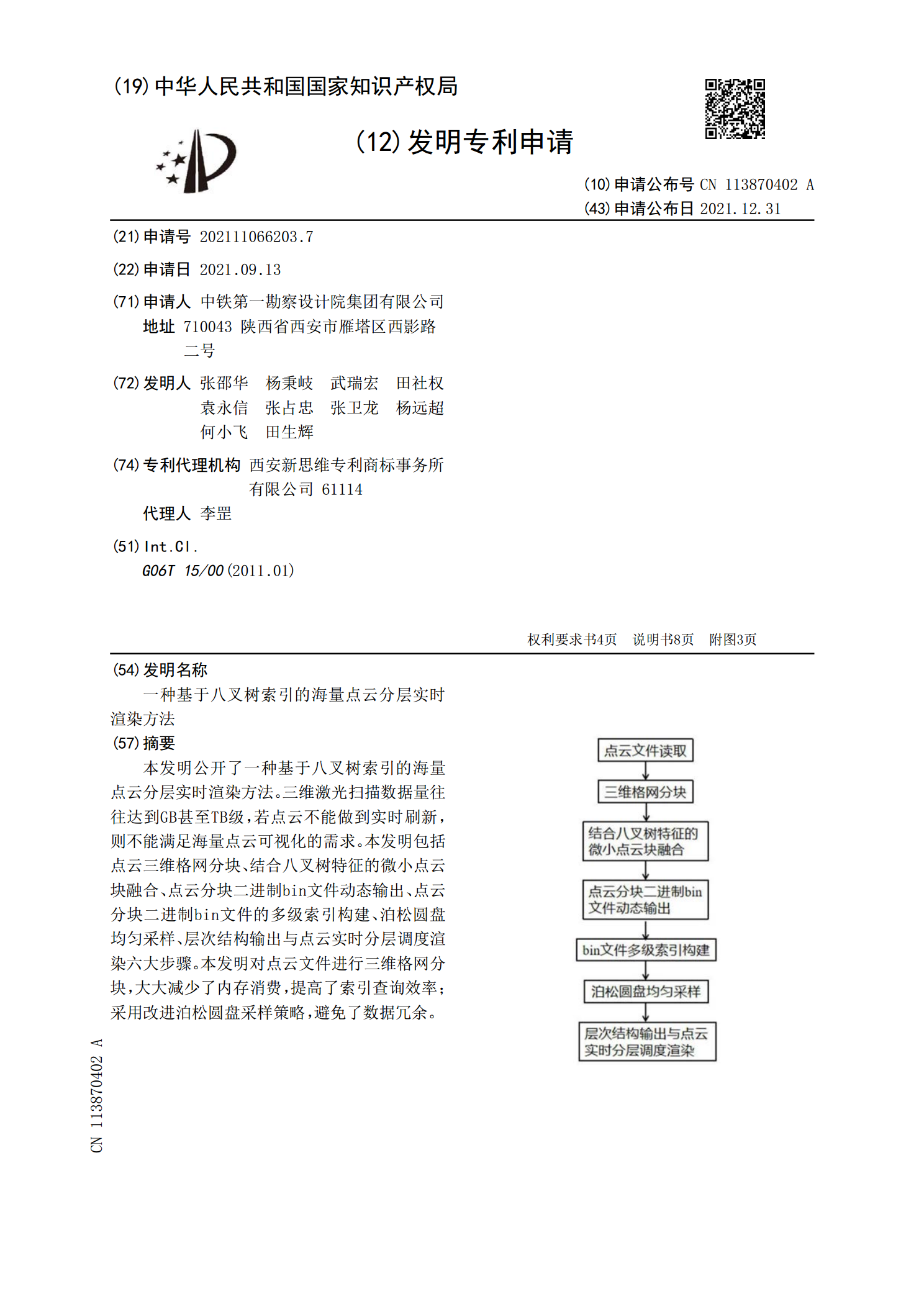
本发明公开了一种基于八叉树索引的海量点云分层实时渲染方法。三维激光扫描数据量往往达到GB甚至TB级,若点云不能做到实时刷新,则不能满足海量点云可视化的需求。本发明包括点云三维格网分块、结合八叉树特征的微小点云块融合、点云分块二进制bin文件动态输出、点云分块二进制bin文件的多级索引构建、泊松圆盘均匀采样、层次结构输出与点云实时分层调度渲染六大步骤。本发明对点云文件进行三维格网分块,大大减少了内存消费,提高了索引查询效率;采用改进泊松圆盘采样策略,避免了数据冗余。

基于线性八叉树的点云数据存贮与索引.docx
基于线性八叉树的点云数据存贮与索引基于线性八叉树的点云数据存储与索引摘要:随着三维点云数据在各个领域的应用越来越广泛,点云数据的存储和索引成为一个重要的问题。本文提出了一种基于线性八叉树的点云数据存储与索引方法。通过将点云数据划分为八叉树节点,在每个节点上存储对应区域内的点云信息,并使用索引结构快速访问特定区域的点云数据。实验结果表明,该方法能够高效地存储和索引大规模的点云数据,并且具有较低的存储空间和查询时间。关键词:点云数据,八叉树,存储,索引一、引言随着三维扫描技术的不断发展和应用领域的逐渐扩展,点

基于外存八叉树的三维激光点云实时渲染技术研究.docx
基于外存八叉树的三维激光点云实时渲染技术研究基于外存八叉树的三维激光点云实时渲染技术研究摘要:随着三维激光扫描技术的发展,三维激光点云数据在许多领域中得到了广泛应用。然而,传统的点云渲染技术在处理大规模点云数据时面临着存储和计算的挑战。为了解决这个问题,本文提出了一种基于外存八叉树的三维激光点云实时渲染技术。通过在外存中构建八叉树索引结构,并采用逐级加载和自适应分辨率技术,实现了实时渲染大规模点云数据的目标。该方法不仅可以有效地管理和存储点云数据,还能够在渲染过程中根据需求动态调整分辨率,保证了渲染效果和
一种基于Web的海量点云渲染方法.pdf
本发明公开了一种基于Web的海量点云渲染方法,它包括以下步骤:S1,获取点云数据;S2,采用四叉树数据结构进行分配数据;S3,利用Potree将点云数据进行渲染到Web浏览器上。本发明使得对于由扫描得到的海量的数据可以转换为点云数据,并且用户还可以在不需要安装第三方软件的基础上在浏览器上传输数据,并且可以在浏览器上实时的查看三维模型的海量数据。应用本发明可以方便用户在浏览器上查看三维海量数据时像浏览网页一样方便。
基于类八叉树索引的点云管理策略研究.pptx
汇报人:CONTENTSPARTONEPARTTWO八叉树的定义类八叉树的构建过程类八叉树的特点PARTTHREE点云的采集与预处理点云的压缩与存储点云的检索与提取点云的分析与应用PARTFOUR类八叉树索引在点云管理中的应用场景类八叉树索引在点云管理中的优势类八叉树索引在点云管理中的实现方法类八叉树索引在点云管理中的性能评估PARTFIVE索引结构的优化检索效率的优化数据压缩与存储的优化应用场景的拓展与适应性优化PARTSIX在虚拟现实领域的应用前景在机器人领域的应用前景在智能制造领域的应用前景在其他领