
一种基于数字孪生的减材加工实时仿真方法.pdf

小凌****甜蜜


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于数字孪生的减材加工实时仿真方法.pdf
本发明公开了一种基于数字孪生的减材加工实时仿真方法,包括以下步骤:构建工件模型;生成刀具模型和输入刀具的移动路径;根据工件模型生成初始高度图,其中,以高度图通道数据表示该位置(x,z)对应的工件在(x,z)的高度值y,采用多通道表示高度值y,y是一个浮点类型;碰撞计算;更新后的高度图数据传输至顶点着色器,生成实时渲染效果图;判断加工是否完成,若未完成则更新刀具位置,重复碰撞计算步骤并更新实时渲染效果图;根据更新后的高度图还原工件模型。本发明的实时仿真方法解决减材加工仿真中的实时加工、实时渲染和精度要求问题
一种基于数字孪生技术的设备实时监控方法.pdf
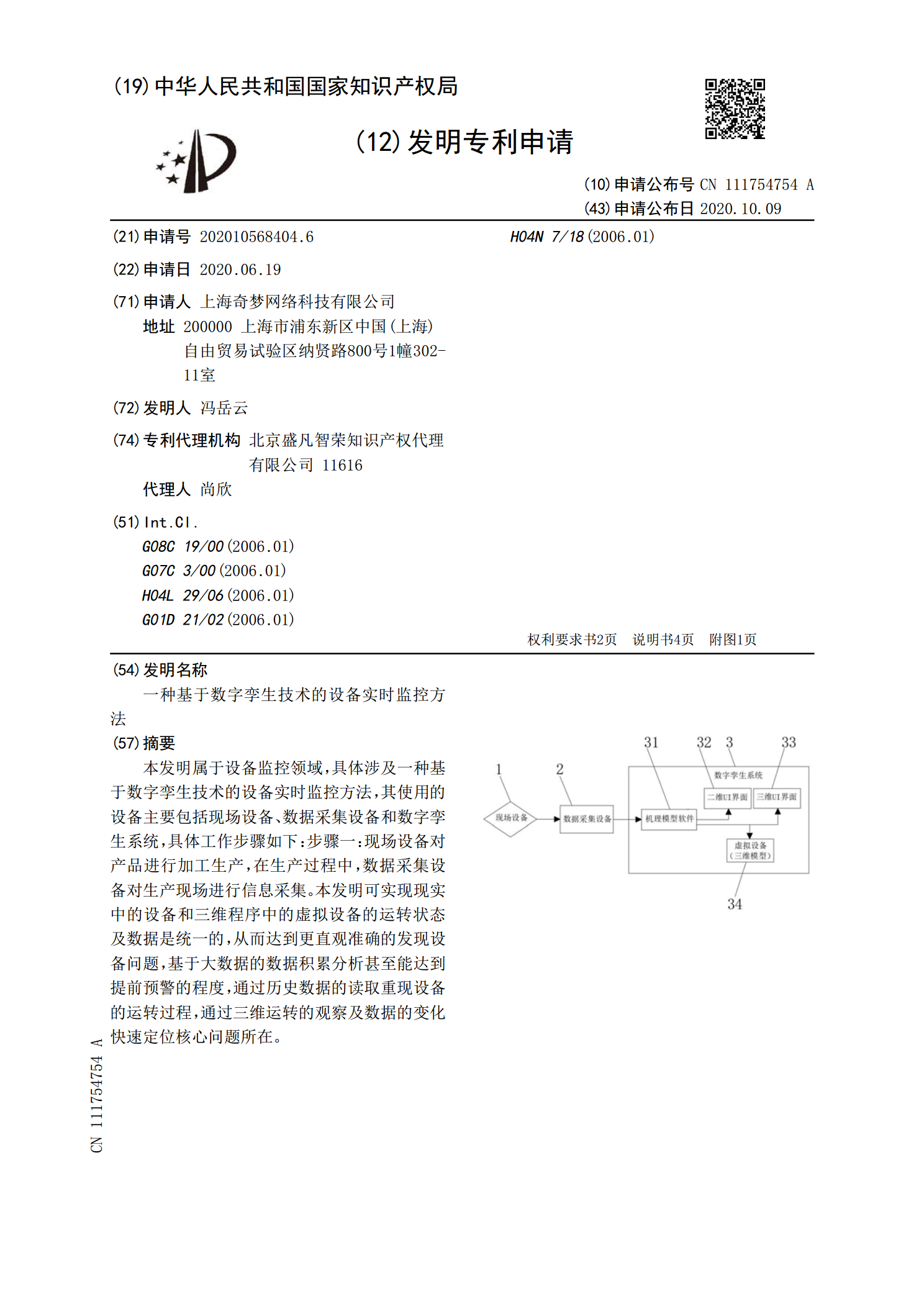
本发明属于设备监控领域,具体涉及一种基于数字孪生技术的设备实时监控方法,其使用的设备主要包括现场设备、数据采集设备和数字孪生系统,具体工作步骤如下:步骤一:现场设备对产品进行加工生产,在生产过程中,数据采集设备对生产现场进行信息采集。本发明可实现现实中的设备和三维程序中的虚拟设备的运转状态及数据是统一的,从而达到更直观准确的发现设备问题,基于大数据的数据积累分析甚至能达到提前预警的程度,通过历史数据的读取重现设备的运转过程,通过三维运转的观察及数据的变化快速定位核心问题所在。
一种基于区块链的水利数字孪生仿真模拟方法.pdf
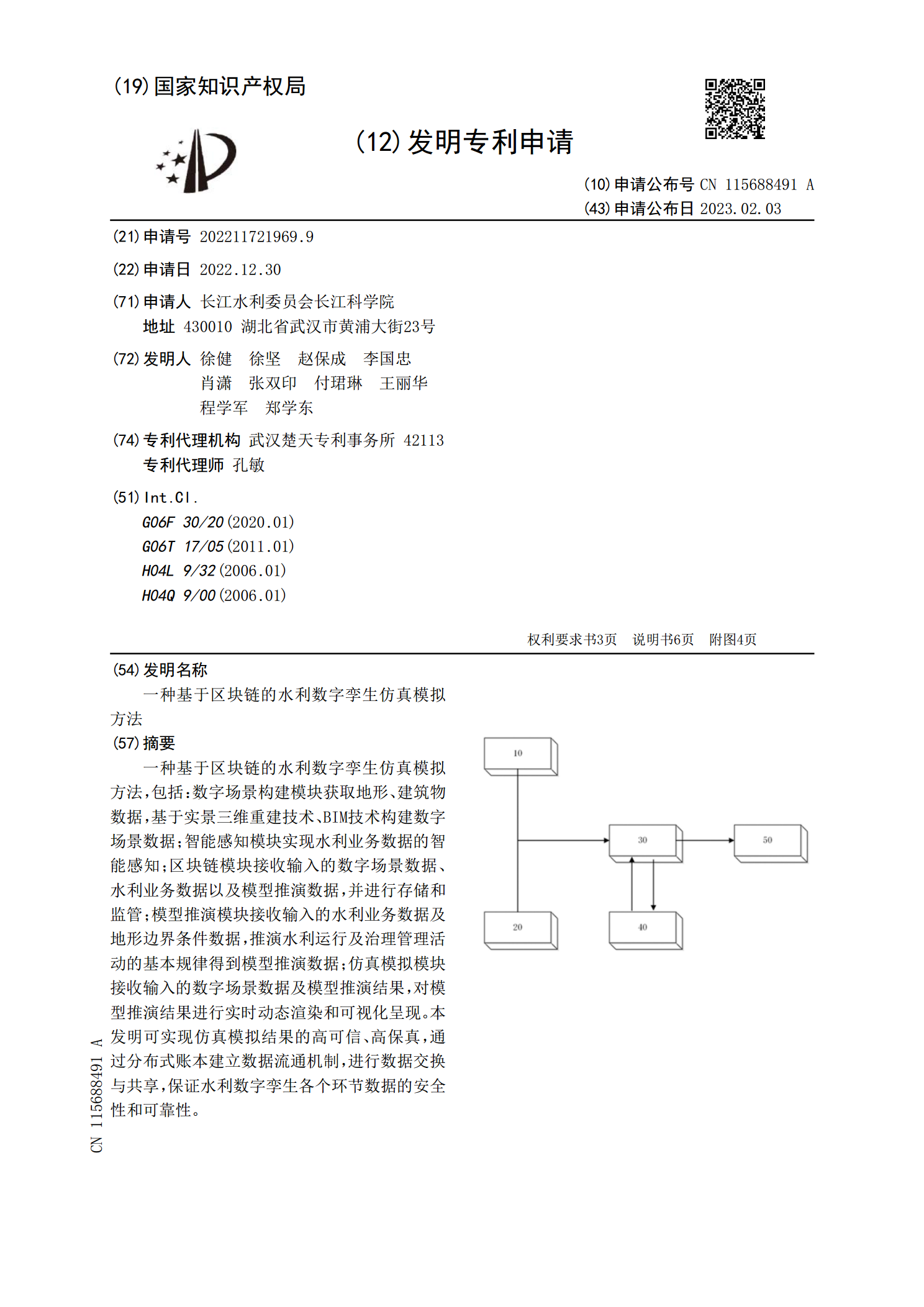
一种基于区块链的水利数字孪生仿真模拟方法,包括:数字场景构建模块获取地形、建筑物数据,基于实景三维重建技术、BIM技术构建数字场景数据;智能感知模块实现水利业务数据的智能感知;区块链模块接收输入的数字场景数据、水利业务数据以及模型推演数据,并进行存储和监管;模型推演模块接收输入的水利业务数据及地形边界条件数据,推演水利运行及治理管理活动的基本规律得到模型推演数据;仿真模拟模块接收输入的数字场景数据及模型推演结果,对模型推演结果进行实时动态渲染和可视化呈现。本发明可实现仿真模拟结果的高可信、高保真,通过分布
一种基于数字孪生技术的工业全真仿真方法及系统.pdf
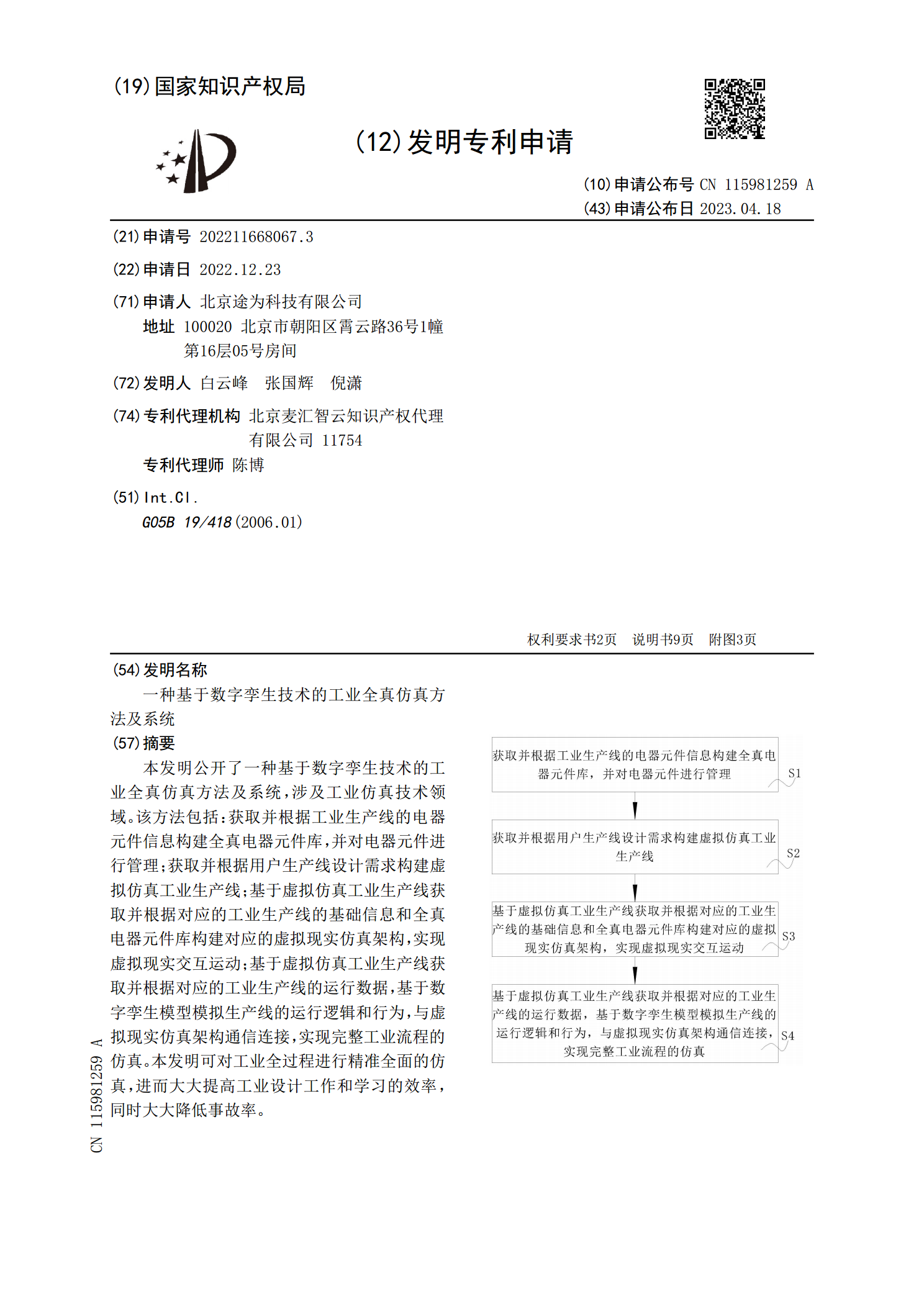
本发明公开了一种基于数字孪生技术的工业全真仿真方法及系统,涉及工业仿真技术领域。该方法包括:获取并根据工业生产线的电器元件信息构建全真电器元件库,并对电器元件进行管理;获取并根据用户生产线设计需求构建虚拟仿真工业生产线;基于虚拟仿真工业生产线获取并根据对应的工业生产线的基础信息和全真电器元件库构建对应的虚拟现实仿真架构,实现虚拟现实交互运动;基于虚拟仿真工业生产线获取并根据对应的工业生产线的运行数据,基于数字孪生模型模拟生产线的运行逻辑和行为,与虚拟现实仿真架构通信连接,实现完整工业流程的仿真。本发明可对
一种基于数字孪生的加工过程自适应控制方法.pdf
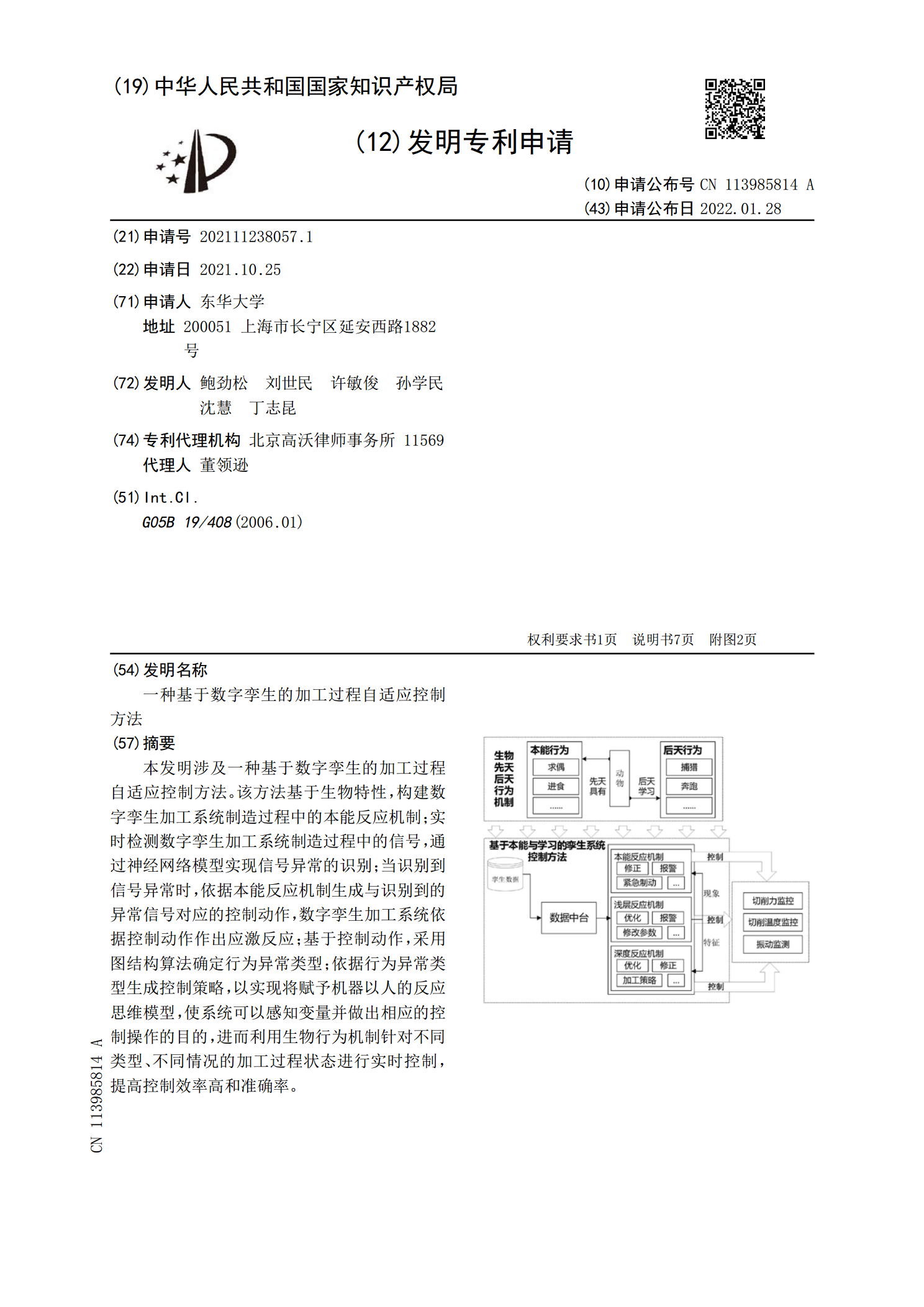
本发明涉及一种基于数字孪生的加工过程自适应控制方法。该方法基于生物特性,构建数字孪生加工系统制造过程中的本能反应机制;实时检测数字孪生加工系统制造过程中的信号,通过神经网络模型实现信号异常的识别;当识别到信号异常时,依据本能反应机制生成与识别到的异常信号对应的控制动作,数字孪生加工系统依据控制动作作出应激反应;基于控制动作,采用图结构算法确定行为异常类型;依据行为异常类型生成控制策略,以实现将赋予机器以人的反应思维模型,使系统可以感知变量并做出相应的控制操作的目的,进而利用生物行为机制针对不同类型、不同情