
基于VR的室内布景设置方法、装置及系统.pdf

傲丝****账号


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于VR的室内布景设置方法、装置及系统.pdf
本发明涉及虚拟现实应用技术领域,具体公开了一种基于VR的室内布景设置方法、装置及系统,所述方法包括接收用户发送的含有建筑数据的布景请求,获取场景的感知数据,根据所述建筑数据和所述感知数据建立场景模型;显示预设的布景物品表,根据所述布景物品表接收用户的选取信息和布置信息,根据所述选取信息和布置信息填充所述场景模型;基于预设的展示标签实时接收用户发送的展示指令,获取场景模型的位置信息,根据所述位置信息确定环境影响因子;基于所述环境影响因子展示填充后的场景模型。本发明建立场景模型,通过VR设备向用户提供布景服务
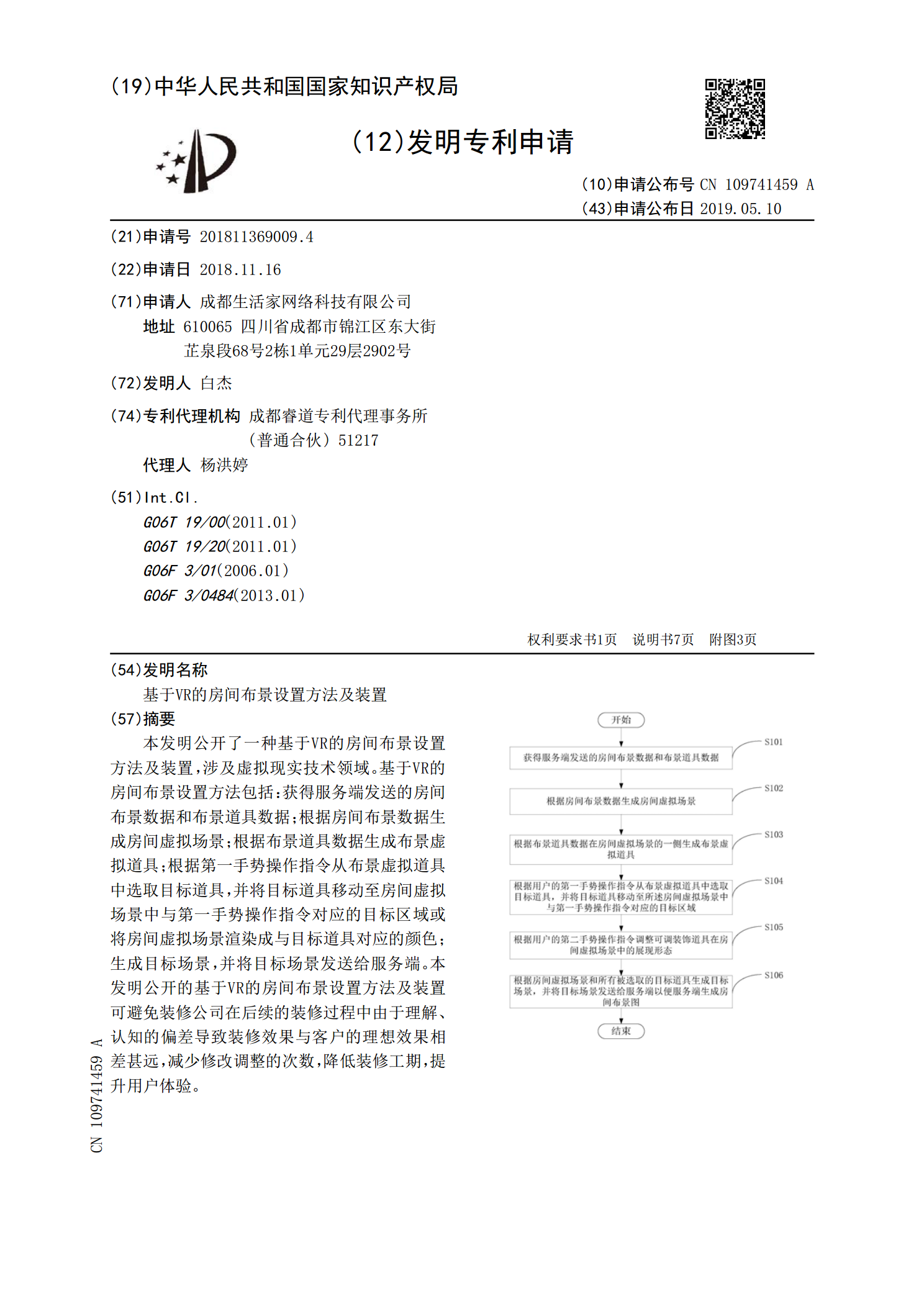
基于VR的房间布景设置方法及装置.pdf
本发明公开了一种基于VR的房间布景设置方法及装置,涉及虚拟现实技术领域。基于VR的房间布景设置方法包括:获得服务端发送的房间布景数据和布景道具数据;根据房间布景数据生成房间虚拟场景;根据布景道具数据生成布景虚拟道具;根据第一手势操作指令从布景虚拟道具中选取目标道具,并将目标道具移动至房间虚拟场景中与第一手势操作指令对应的目标区域或将房间虚拟场景渲染成与目标道具对应的颜色;生成目标场景,并将目标场景发送给服务端。本发明公开的基于VR的房间布景设置方法及装置可避免装修公司在后续的装修过程中由于理解、认知的偏差

基于VR的房间布景设置方法、装置及VR穿戴设备.pdf
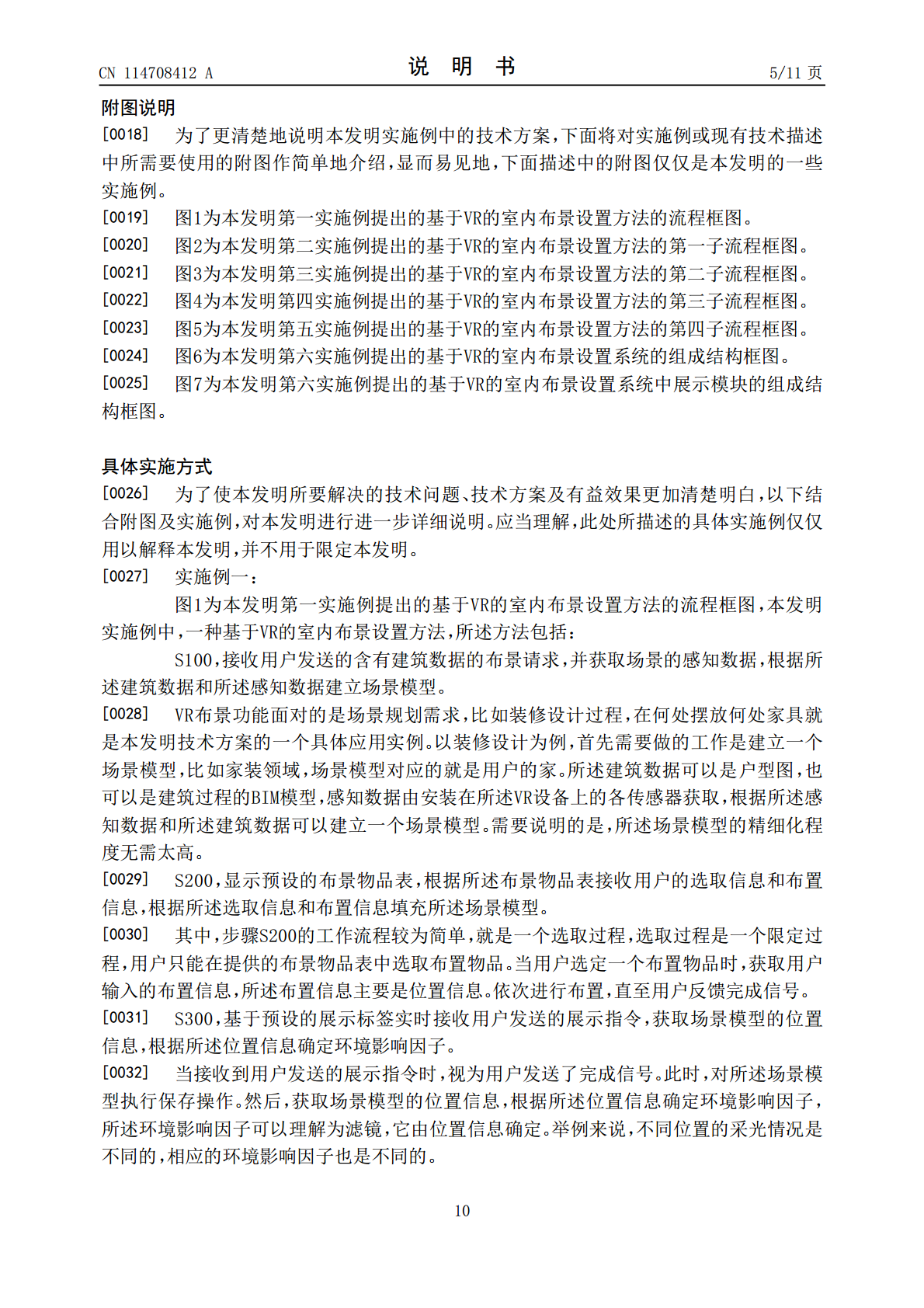
本发明公开了一种基于VR的房间布景设置方法、装置及VR穿戴设备,涉及虚拟现实技术领域。该方法包括:依据获得房间内的多张图像进行图像融合生成房间虚拟场景;根据服务端发送的布景道具数据在房间虚拟场景的一侧生成布景虚拟道具;根据第一手势操作指令选取目标道具,将目标道具移动至对应的目标区域或将房间虚拟场景渲染成与目标道具对应的颜色;根据房间虚拟场景和所有被选取的目标道具生成目标场景,并将目标场景发送给服务端。本发明公开的基于VR的房间布景设置方法、装置及VR穿戴设备避免装修公司在后续的装修过程中由于理解、认知的偏

一种基于VR装置的显示方法及系统.pdf
本发明实施例涉及显示技术领域,尤其涉及一种基于VR装置的显示方法及系统,其中,一种基于VR装置的显示方法,包括:于所述VR装置工作于正常模式状态下,控制显示单元的第一预定区域工作于显示状态;获取头部运动的采集数据,根据所述采集数据计算形成一补偿数据;根据所述补偿数据结合所述第一预定区域形成第一显示区域,以使所述第一显示区域匹配所述补偿数据。本发明中,VR装置预留一补偿区域,在用户发送头部运动时,利用补偿区域将当前的第一预定显示区域切换至与头部运动匹配的第一显示区域,无需切换整个屏幕的显示,仅切换当前显示面

一种基于VR装置的显示方法及系统.pdf
本发明实施例涉及显示技术领域,尤其涉及一种基于VR装置的显示方法及系统,其中显示方法,包括于VR装置工作于正常模式状态下,显示单元内的第一预定区域工作于显示状态;实时获取人眼图像,并基于眼球追踪技术计算形成视线焦点与眼球的景深数据;获取头部运动的采集数据,根据采集数据、景深数据计算形成补偿数据,并保存补偿数据;根据补偿数据结合第一预定区域形成第一显示区域,以使第一显示区域与第一预定区域之间的相对位移匹配补偿数据。本发明中,VR装置预留补偿区域,利用补偿区域将当前的第一预定显示区域切换至与头部运动匹配的第一