
基于三维GIS的物联设备可视化渲染方法及系统.pdf

英哲****公主

1/10
2/10

3/10
4/10

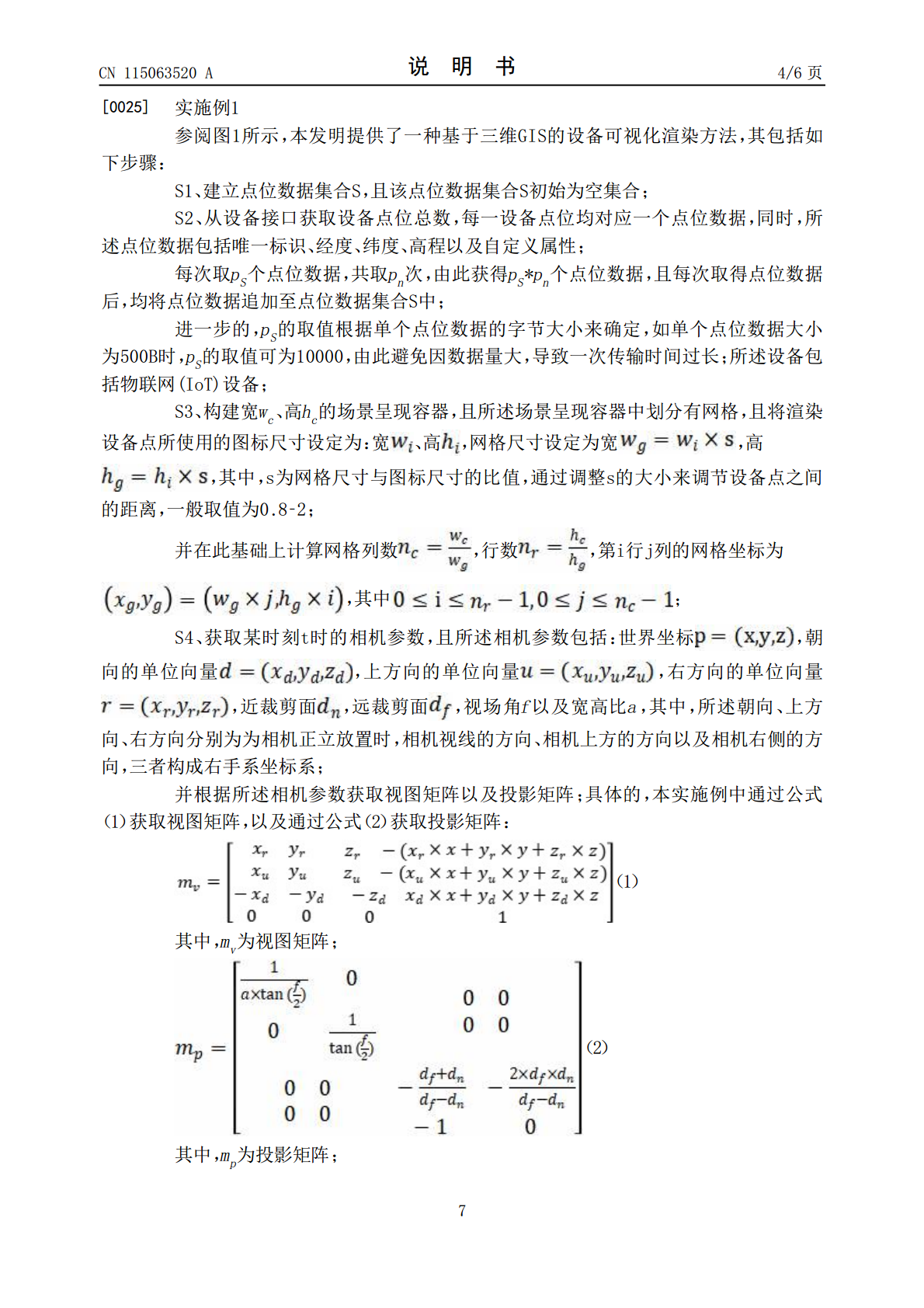
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于三维GIS的物联设备可视化渲染方法及系统.pdf
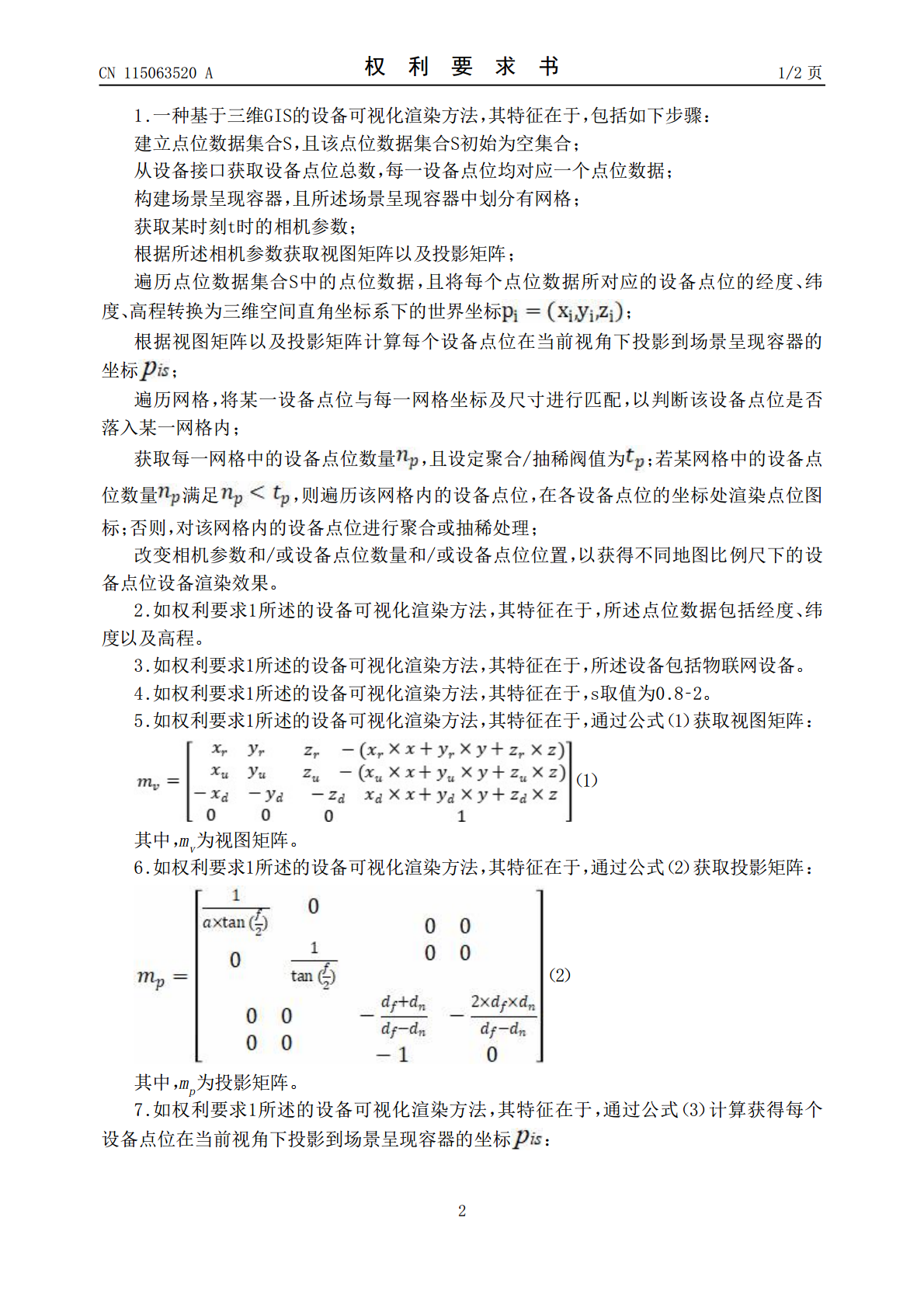
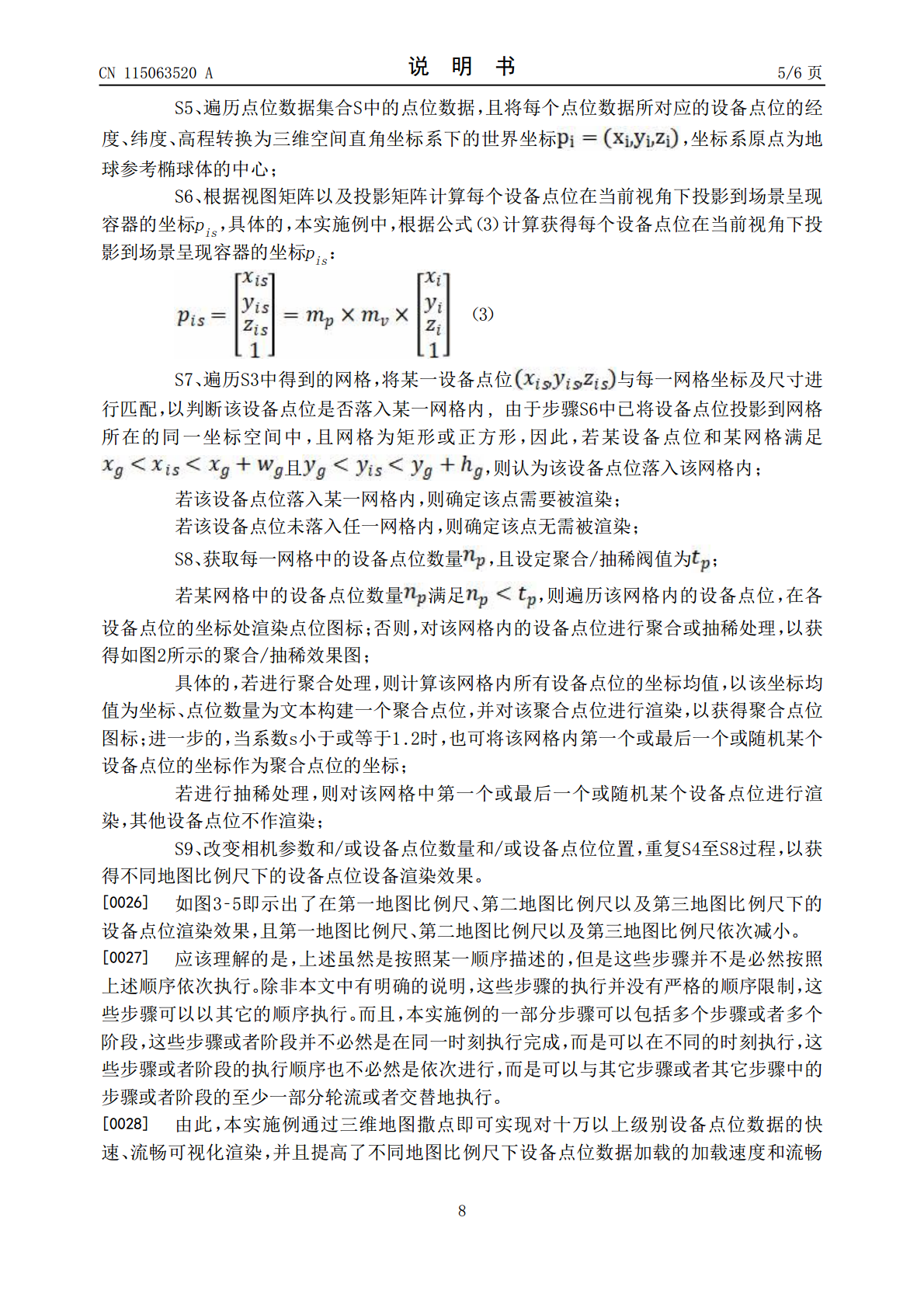
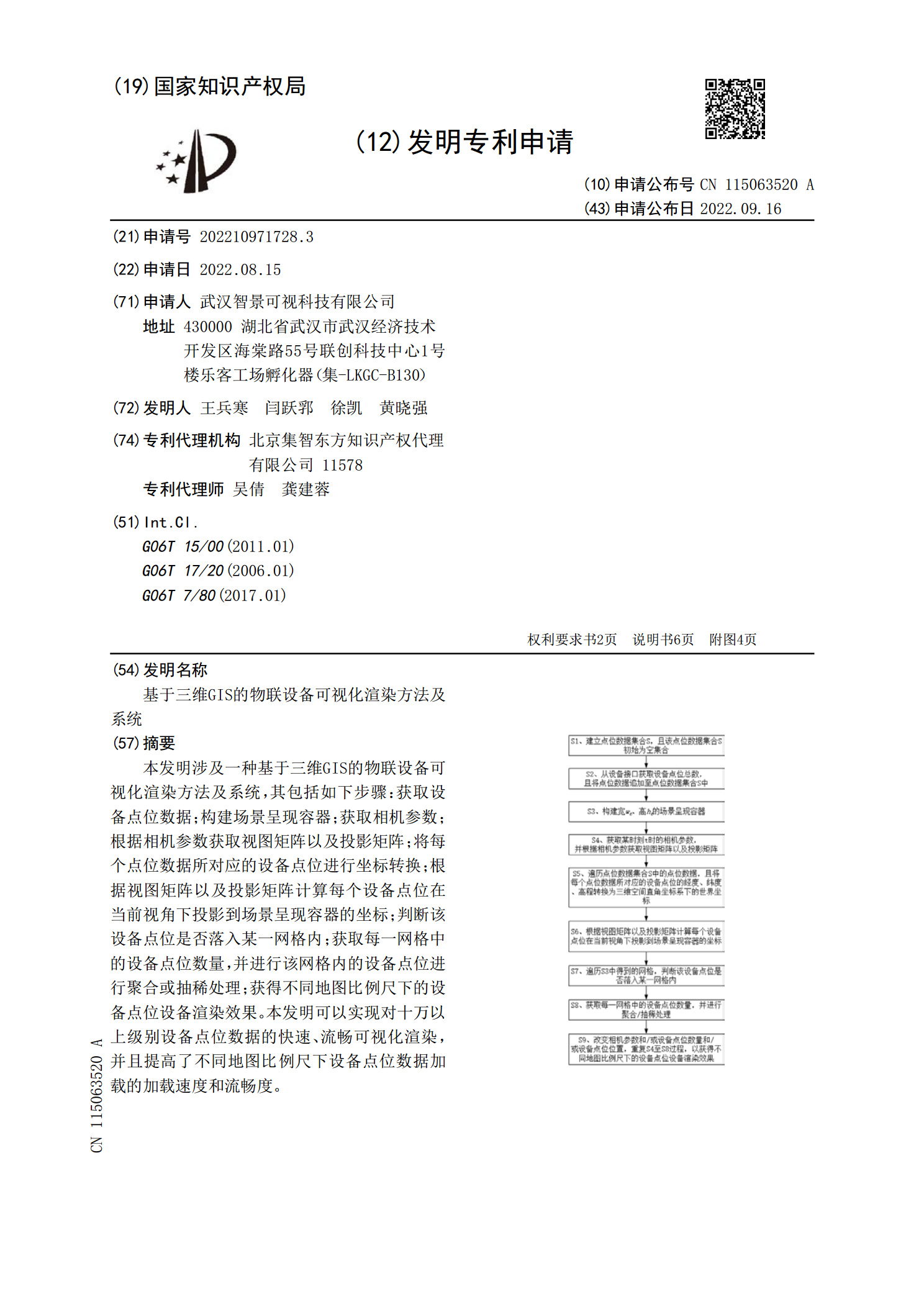
本发明涉及一种基于三维GIS的物联设备可视化渲染方法及系统,其包括如下步骤:获取设备点位数据;构建场景呈现容器;获取相机参数;根据相机参数获取视图矩阵以及投影矩阵;将每个点位数据所对应的设备点位进行坐标转换;根据视图矩阵以及投影矩阵计算每个设备点位在当前视角下投影到场景呈现容器的坐标;判断该设备点位是否落入某一网格内;获取每一网格中的设备点位数量,并进行该网格内的设备点位进行聚合或抽稀处理;获得不同地图比例尺下的设备点位设备渲染效果。本发明可以实现对十万以上级别设备点位数据的快速、流畅可视化渲染,并且提高

基于远程渲染的移动三维GIS可视化研究.docx
基于远程渲染的移动三维GIS可视化研究摘要:本文基于远程渲染的移动三维GIS可视化,探讨了相关的技术和应用,分析了其优势和不足,并提出相应的解决方案。首先,介绍了移动三维GIS可视化的背景和意义,并讨论了远程渲染的技术原理,以及其在三维GIS可视化中的应用。然后,阐述了远程渲染技术的优势和不足,分析了其局限性和难点。最后,针对远程渲染技术的不足,提出了解决方案,并探讨了未来的研究方向。关键词:远程渲染,移动三维GIS可视化,技术原理,优劣势,解决方案,研究方向正文:移动三维GIS可视化是当前热门的研究方向
基于三维GIS技术的电网可视化系统及方法.pdf
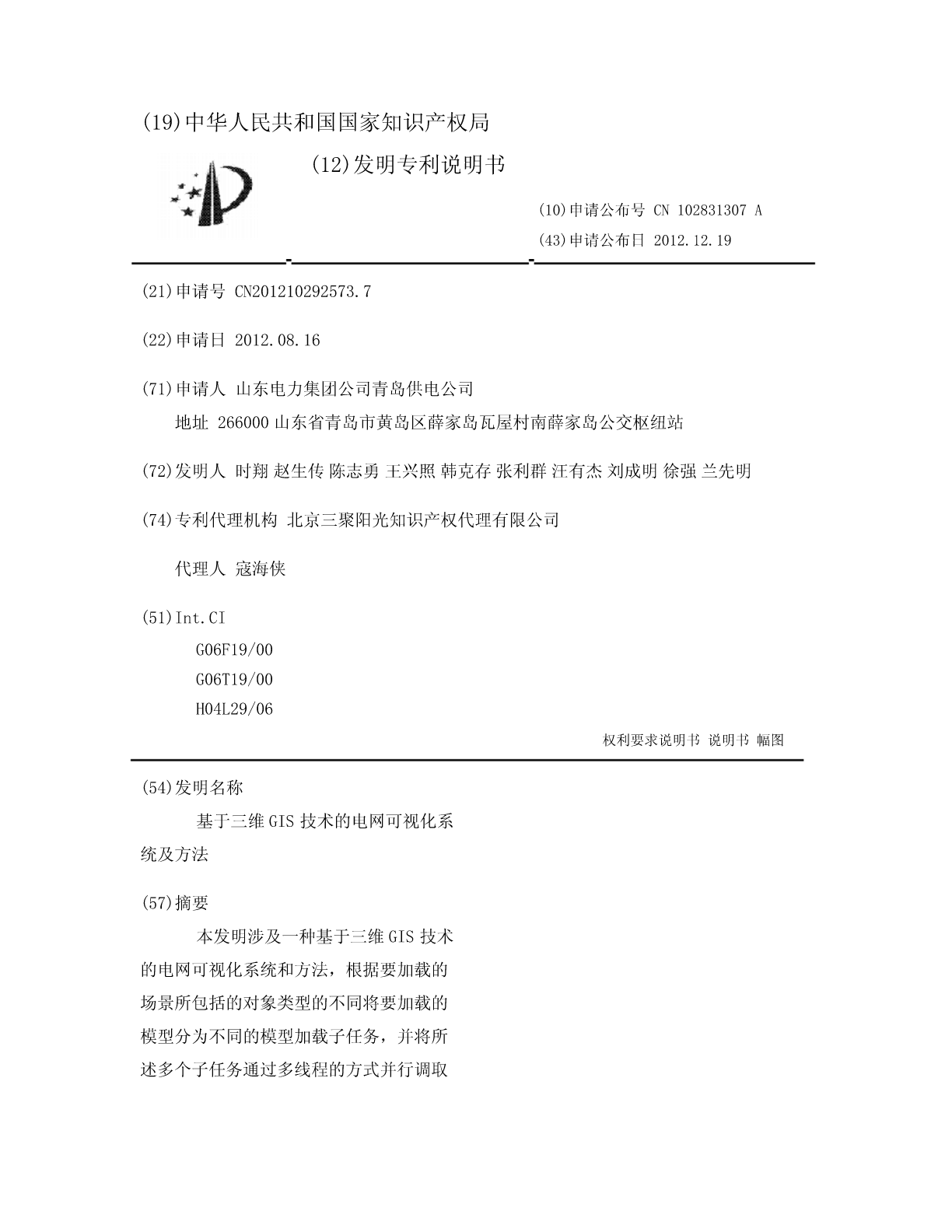
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN102831307A(43)申请公布日2012.12.19(21)申请号CN201210292573.7(22)申请日2012.08.16(71)申请人山东电力集团公司青岛供电公司地址266000山东省青岛市黄岛区薛家岛瓦屋村南薛家岛公交枢纽站(72)发明人时翔赵生传陈志勇王兴照韩克存张利群汪有杰刘成明徐强兰先明(74)专利代理机构北京三聚阳光知识产权代理有限公司代理人寇海侠(51)Int.CIG06F19/00G06T19/

基于远程渲染的移动三维GIS构建方法.docx
基于远程渲染的移动三维GIS构建方法随着移动技术的不断发展和普及,移动三维GIS的需求也越来越高。移动三维GIS能够提供更加直观、便捷的地图服务,使用户能够更加方便地获取所需要的地理信息。然而,在移动设备上实现三维GIS也面临着一些挑战,例如移动设备性能有限、内存容量较小等。为了解决这些问题,基于远程渲染的移动三维GIS构建方法应运而生。基于远程渲染的移动三维GIS构建方法主要分为两个部分:服务器端渲染和客户端渲染。服务器端渲染是指将地图数据传输到服务器端进行渲染处理,然后将处理后的图像传输到客户端显示。
一种大数据可视化三维GIS云渲染项目生成系统与方法.pdf
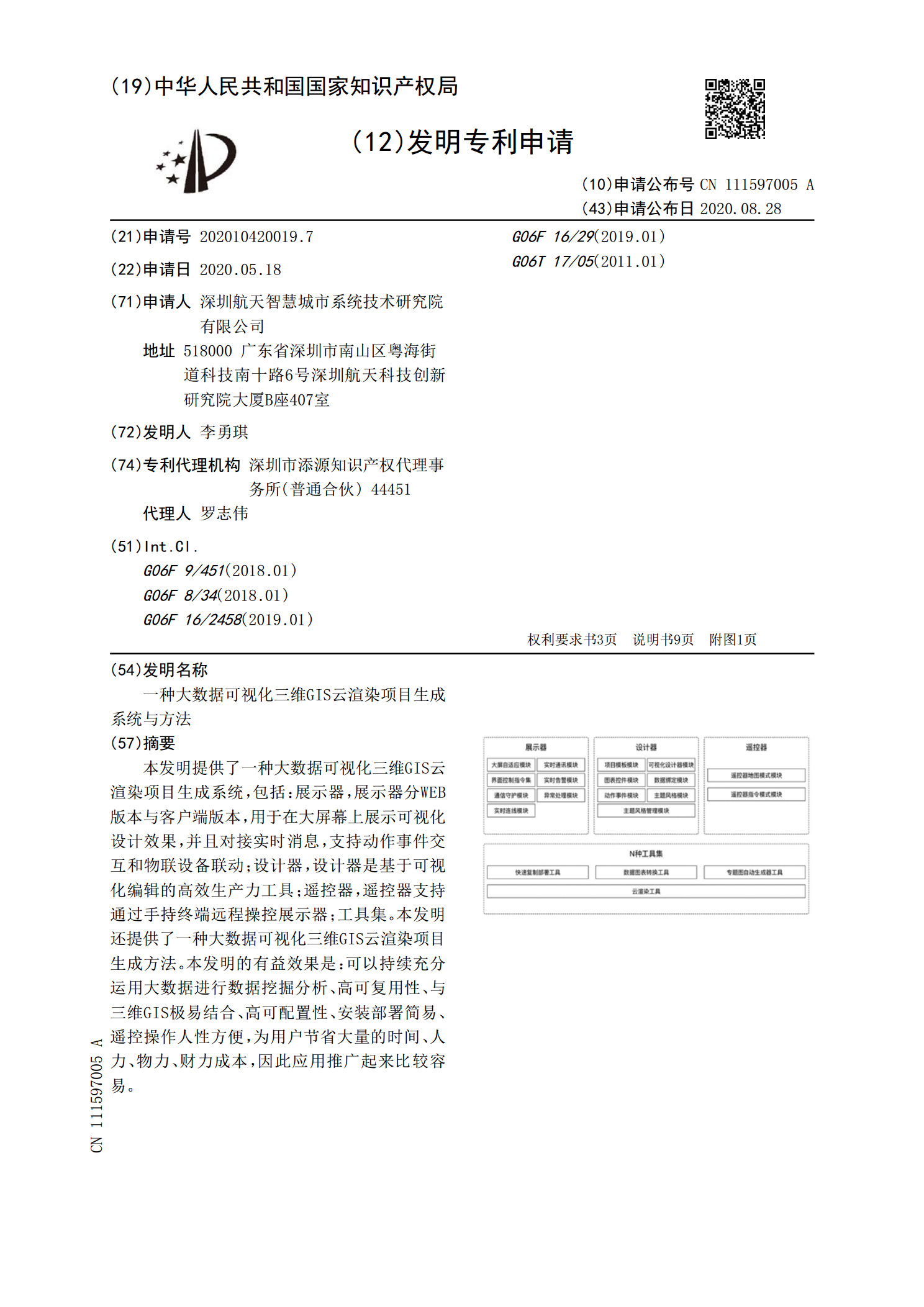
本发明提供了一种大数据可视化三维GIS云渲染项目生成系统,包括:展示器,展示器分WEB版本与客户端版本,用于在大屏幕上展示可视化设计效果,并且对接实时消息,支持动作事件交互和物联设备联动;设计器,设计器是基于可视化编辑的高效生产力工具;遥控器,遥控器支持通过手持终端远程操控展示器;工具集。本发明还提供了一种大数据可视化三维GIS云渲染项目生成方法。本发明的有益效果是:可以持续充分运用大数据进行数据挖掘分析、高可复用性、与三维GIS极易结合、高可配置性、安装部署简易、遥控操作人性方便,为用户节省大量的时间、