
一种三维视频融合标定及实时渲染的方法及装置.pdf

和裕****az


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种三维视频融合标定及实时渲染的方法及装置.pdf
本发明公开了一种三维视频融合标定及实时渲染的方法及装置,所述方法包括:获取视频帧图像,进行畸变校正,保存进行畸变校正的畸变参数;分别在所述视频帧图像及所述视频帧图像对应三维场景的画面位置中选取多个特征点,对所述视频帧图像与所述三维场景的画面位置进行配准;获取拍摄所述视频的相机的初始内参,通过优化求解的方式,求出最优内参;基于所述最优内参,确定所述相机相对世界坐标系原点的旋转、平移向量;确定所述相机在三维场景中的世界坐标和旋转角度,将畸变校正后的图像以纹理投影的方式,投影到所述三维场景的画面位置对应的三维面

一种视频实时渲染的方法和装置.pdf
本发明提供了一种视频实时渲染的方法和装置,所述装置包括视频解码单元、视频显示单元和内存单元;所述视频解码单元用于从内存单元中获取待解码数据,并将内存标识发送至视频显示单元;所述视频显示单元用于接收内存标识,开始执行显示预处理;所述视频解码单元用于对待解码数据进行解码,得到解码数据,并将解码数据返回给内存单元;所述视频显示单元还用于在接收到显示同步信号时,执行步骤S1:根据当前内存单元中的解码完成标志位来确定解码数据是否可渲染,若是则执行步骤S2:渲染显示接收的内存标识对应的解码数据;否则执行步骤S3:在接

一种监控实时视频与场景三维模型融合方法及系统.pdf
本发明公开了一种监控实时视频与场景三维模型融合方法及系统,包括建立监控场景真实感三维模型,视频监控摄像机位姿计算,摄像机视频帧图像到场景三维模型映射关系计算,摄像机实时动态监控视频流传输解码至可视化客户端,动态监控视频流实时三维模型纹理映射和渲染。本发明提出了一套实时监控视频与场景三维模型无缝融合的技术方案,实现视频画面按照严密的几何关系融入到三维场景中,利用动态监控视频数据,增强了场景三维可视化表达效果,为三维实时“Video+GIS”建设提供了一种高效、可靠和可行的方法,具有成本低、可操作性强等优势,
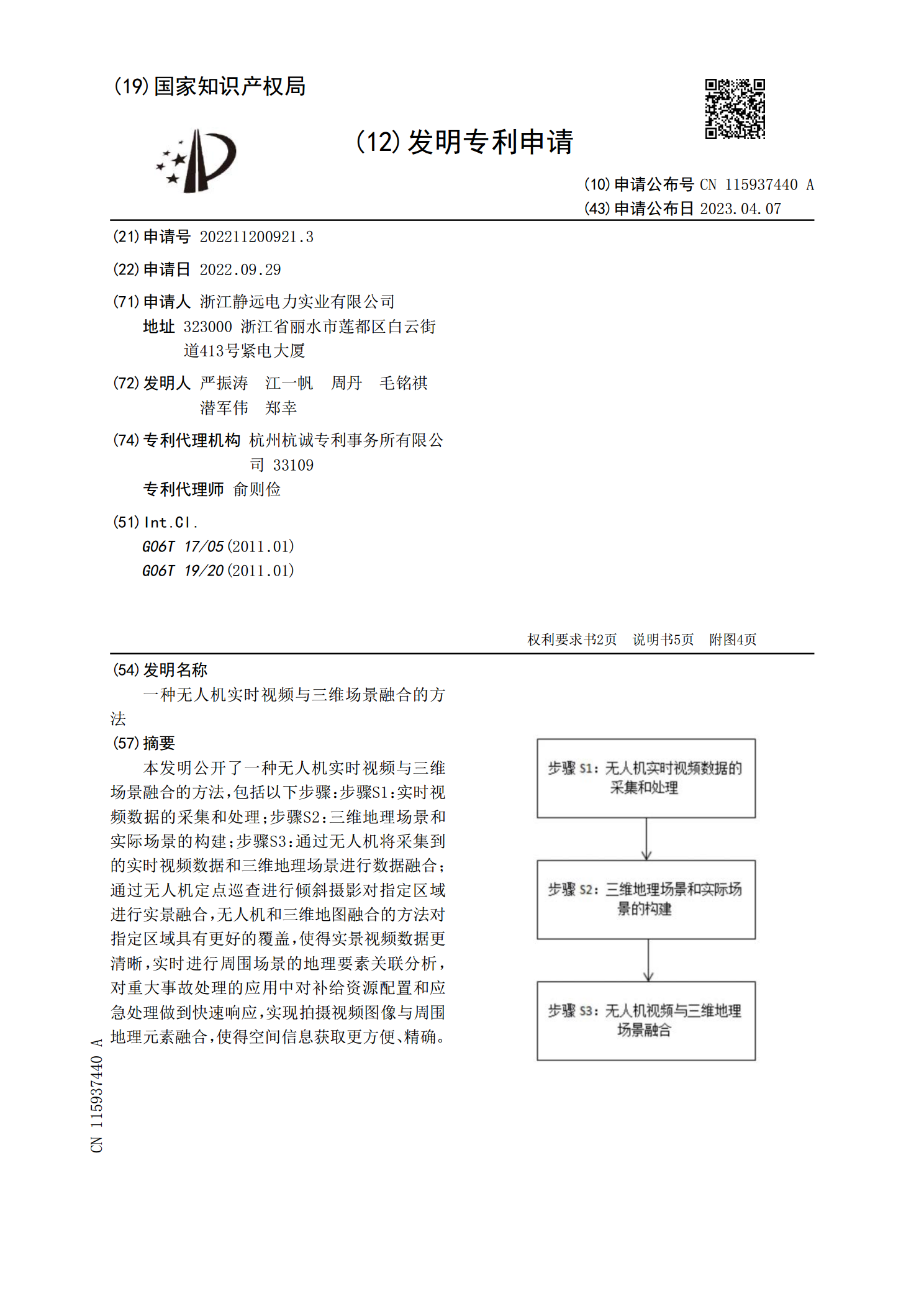
一种无人机实时视频与三维场景融合的方法.pdf
本发明公开了一种无人机实时视频与三维场景融合的方法,包括以下步骤:步骤S1:实时视频数据的采集和处理;步骤S2:三维地理场景和实际场景的构建;步骤S3:通过无人机将采集到的实时视频数据和三维地理场景进行数据融合;通过无人机定点巡查进行倾斜摄影对指定区域进行实景融合,无人机和三维地图融合的方法对指定区域具有更好的覆盖,使得实景视频数据更清晰,实时进行周围场景的地理要素关联分析,对重大事故处理的应用中对补给资源配置和应急处理做到快速响应,实现拍摄视频图像与周围地理元素融合,使得空间信息获取更方便、精确。
一种实时渲染方法、装置及终端.pdf
本发明公开了一种实时渲染方法,包括:将输入画面中对象占用的每个像素点的法向量分别映射为与所述像素点相关联的预设二维坐标,从而获取虚拟物体对应的三维模型的表面纹理;一种所述的实时渲染方法的装置,包括:映射单元、客户端数据加载单元、动态显示管理单元、结构转换渲染单元、操作终端单元;一种所述的一种实时渲染方法的装置的终端,包括:显示装置、存储器以及耦合于所述存储器的处理器。与现有技术相比的优点在于:本发明通过对场景进行优化,降低场景的复杂程度,并利用实时光线追踪算法,有效降低渲染时长,加快图像显示速率,从而达到