
一种基于深度信息的图像渲染方法及装置.pdf

是你****噩呀

1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于深度信息的图像渲染方法及装置.pdf
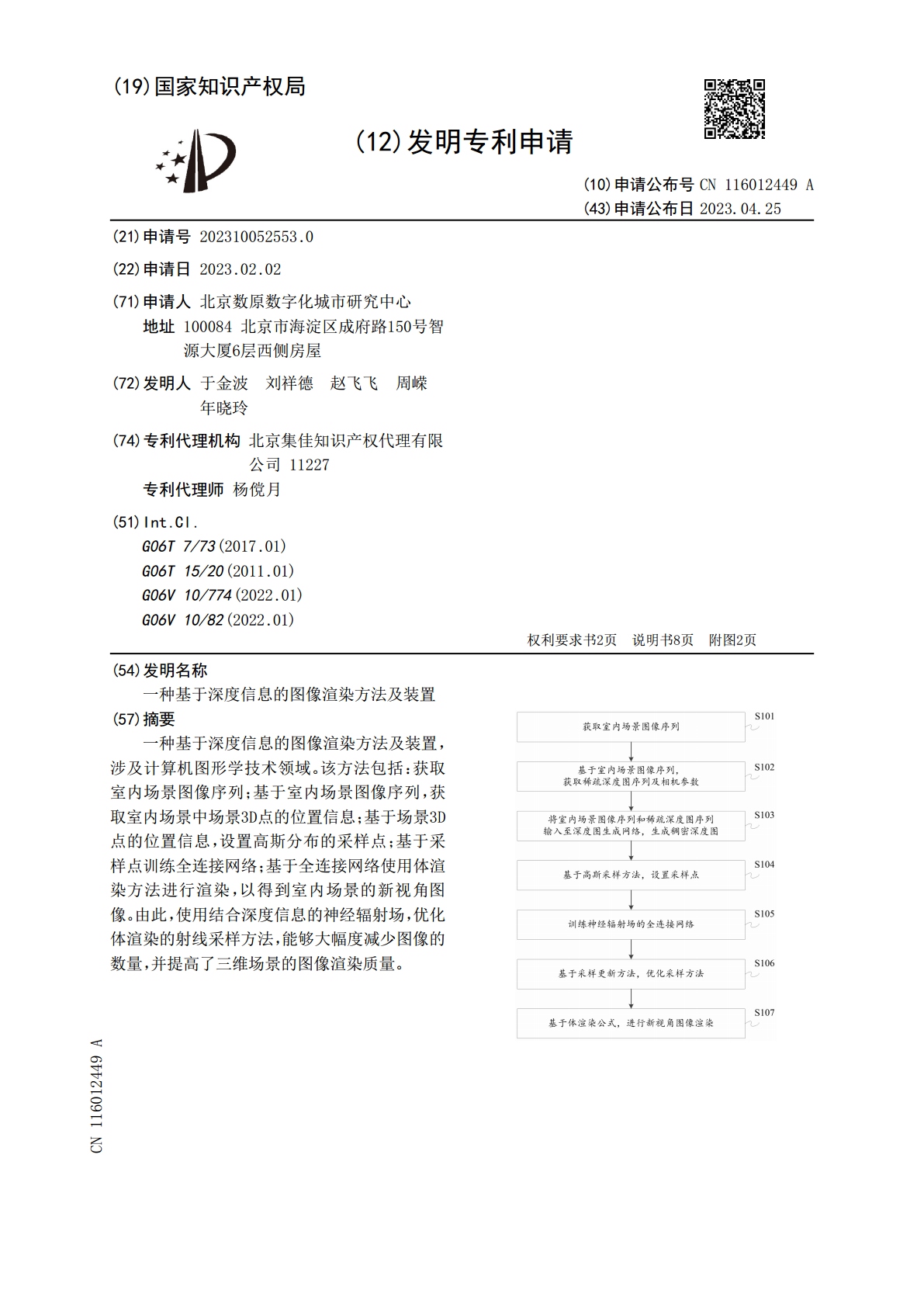
一种基于深度信息的图像渲染方法及装置,涉及计算机图形学技术领域。该方法包括:获取室内场景图像序列;基于室内场景图像序列,获取室内场景中场景3D点的位置信息;基于场景3D点的位置信息,设置高斯分布的采样点;基于采样点训练全连接网络;基于全连接网络使用体渲染方法进行渲染,以得到室内场景的新视角图像。由此,使用结合深度信息的神经辐射场,优化体渲染的射线采样方法,能够大幅度减少图像的数量,并提高了三维场景的图像渲染质量。
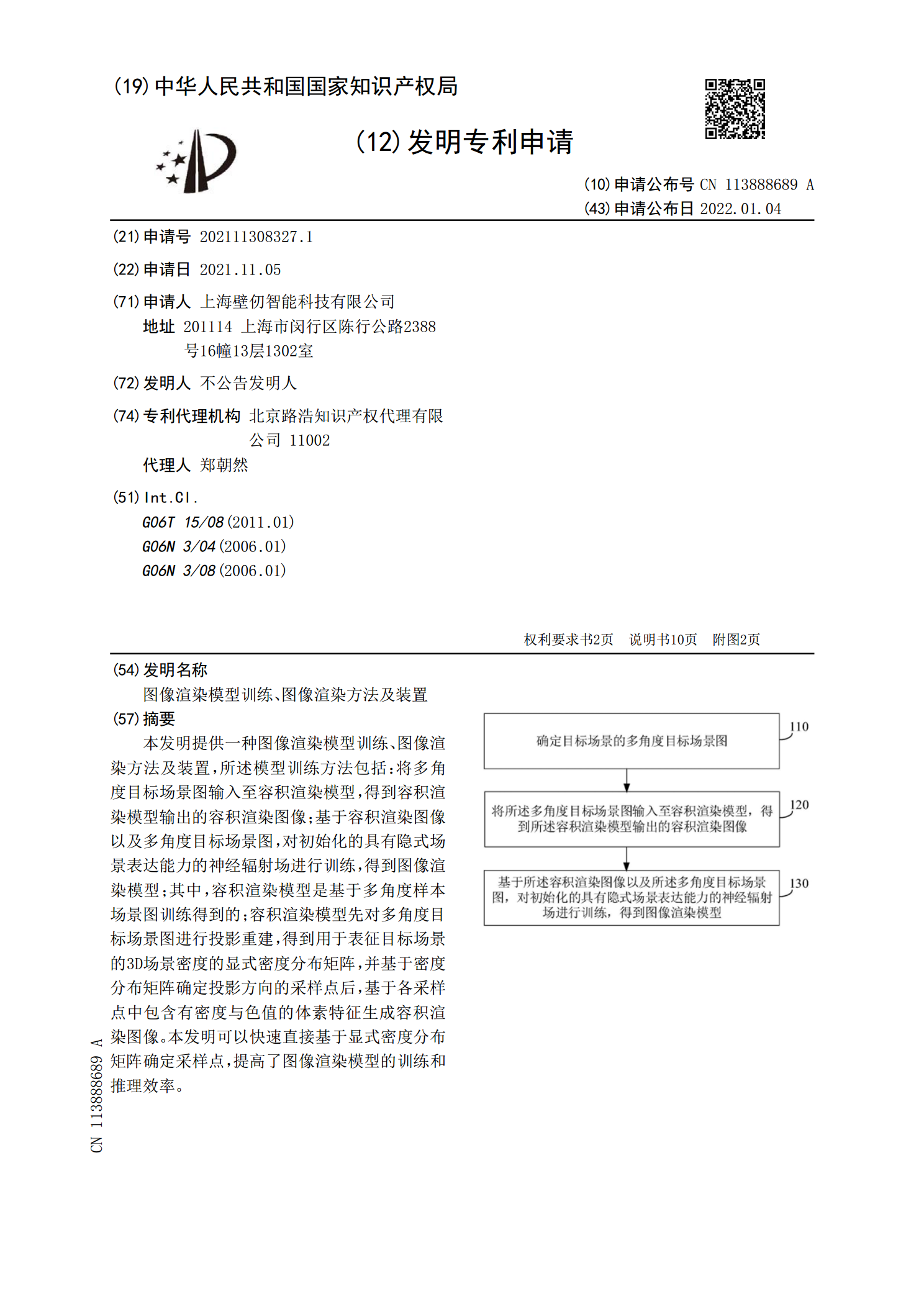
图像渲染模型训练、图像渲染方法及装置.pdf
本发明提供一种图像渲染模型训练、图像渲染方法及装置,所述模型训练方法包括:将多角度目标场景图输入至容积渲染模型,得到容积渲染模型输出的容积渲染图像;基于容积渲染图像以及多角度目标场景图,对初始化的具有隐式场景表达能力的神经辐射场进行训练,得到图像渲染模型;其中,容积渲染模型是基于多角度样本场景图训练得到的;容积渲染模型先对多角度目标场景图进行投影重建,得到用于表征目标场景的3D场景密度的显式密度分布矩阵,并基于密度分布矩阵确定投影方向的采样点后,基于各采样点中包含有密度与色值的体素特征生成容积渲染图像。本
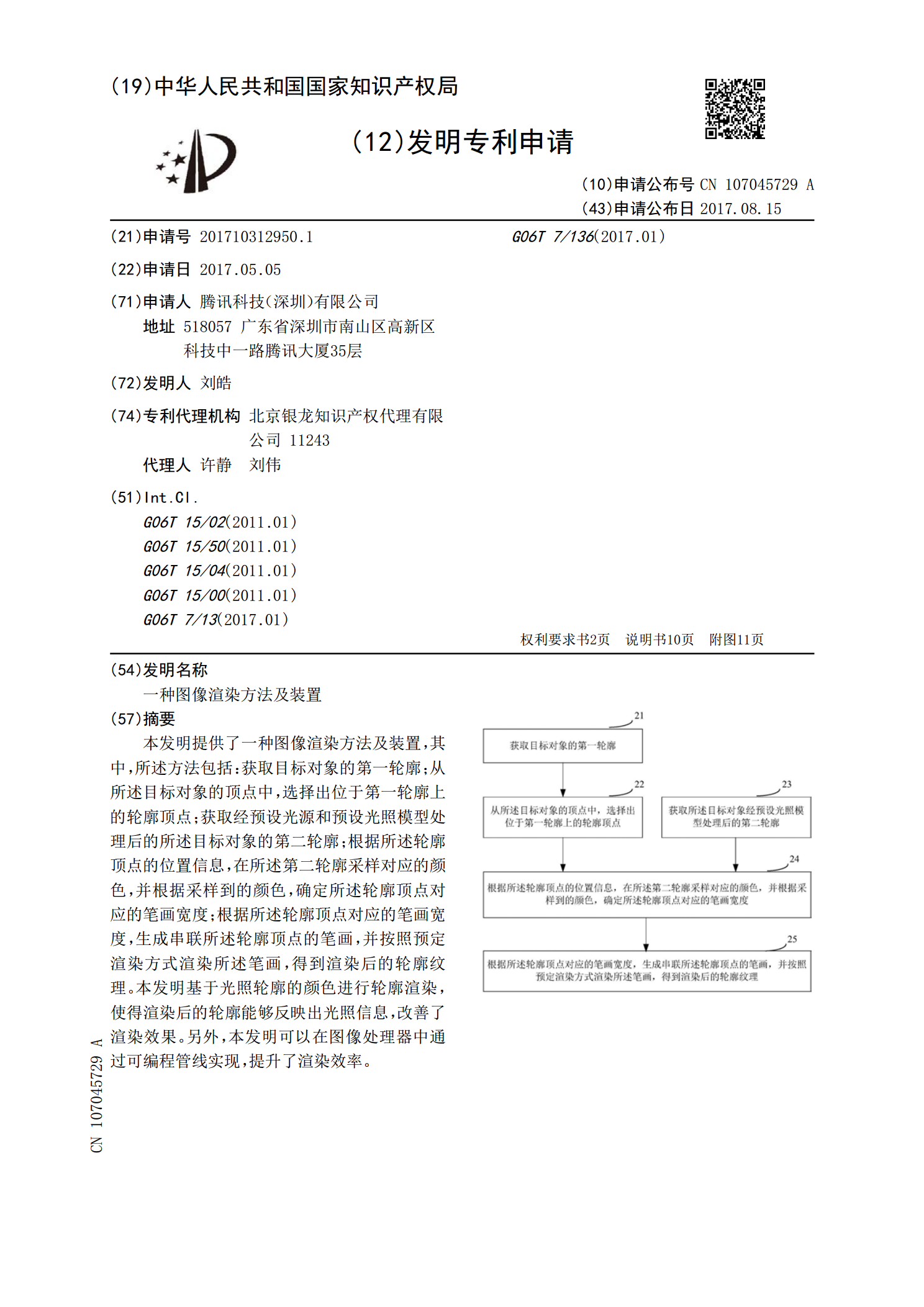
一种图像渲染方法及装置.pdf
本发明提供了一种图像渲染方法及装置,其中,所述方法包括:获取目标对象的第一轮廓;从所述目标对象的顶点中,选择出位于第一轮廓上的轮廓顶点;获取经预设光源和预设光照模型处理后的所述目标对象的第二轮廓;根据所述轮廓顶点的位置信息,在所述第二轮廓采样对应的颜色,并根据采样到的颜色,确定所述轮廓顶点对应的笔画宽度;根据所述轮廓顶点对应的笔画宽度,生成串联所述轮廓顶点的笔画,并按照预定渲染方式渲染所述笔画,得到渲染后的轮廓纹理。本发明基于光照轮廓的颜色进行轮廓渲染,使得渲染后的轮廓能够反映出光照信息,改善了渲染效果。
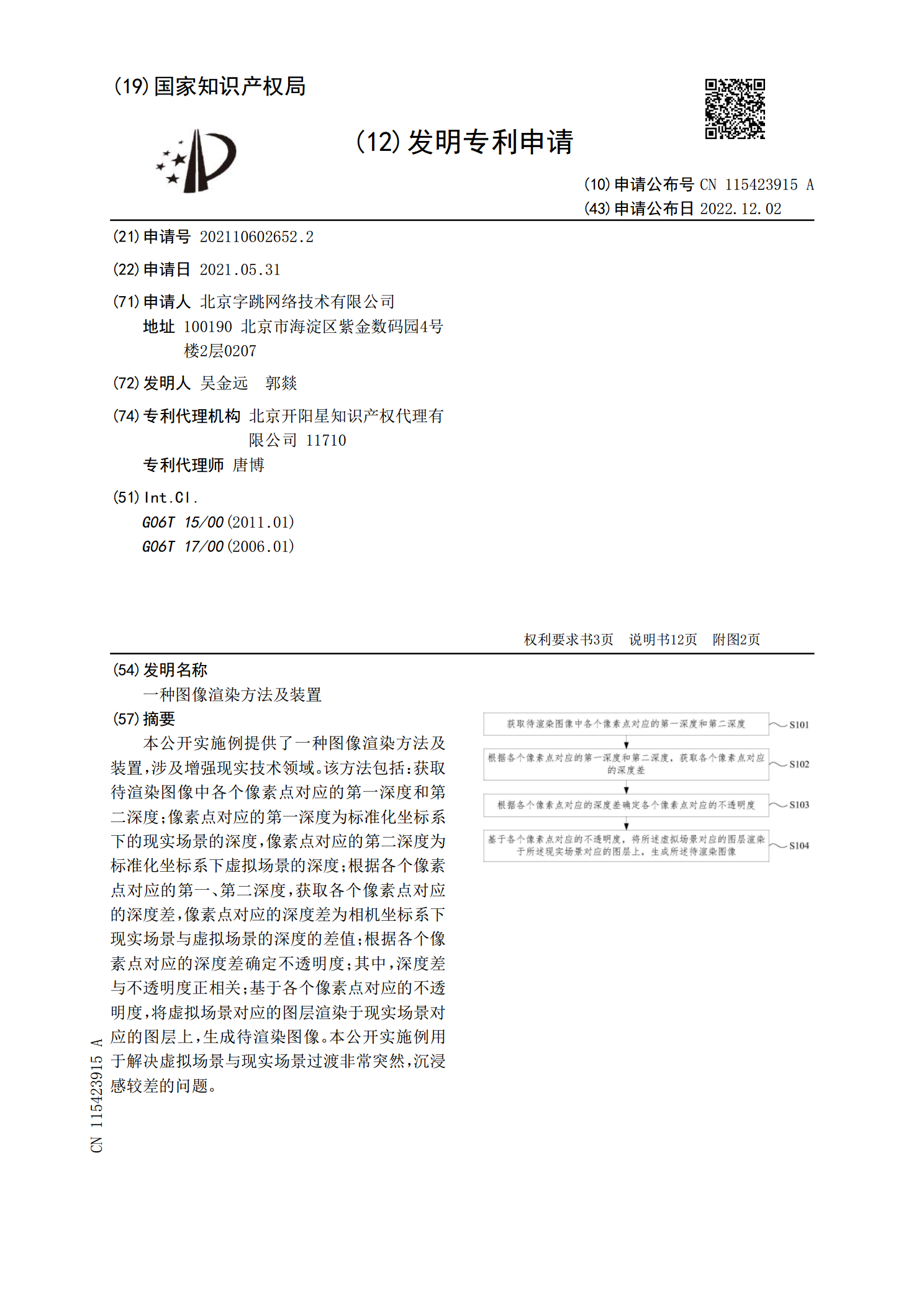
一种图像渲染方法及装置.pdf
本公开实施例提供了一种图像渲染方法及装置,涉及增强现实技术领域。该方法包括:获取待渲染图像中各个像素点对应的第一深度和第二深度;像素点对应的第一深度为标准化坐标系下的现实场景的深度,像素点对应的第二深度为标准化坐标系下虚拟场景的深度;根据各个像素点对应的第一、第二深度,获取各个像素点对应的深度差,像素点对应的深度差为相机坐标系下现实场景与虚拟场景的深度的差值;根据各个像素点对应的深度差确定不透明度;其中,深度差与不透明度正相关;基于各个像素点对应的不透明度,将虚拟场景对应的图层渲染于现实场景对应的图层上,

一种图像渲染方法和装置.pdf
本发明实施例提供了一种图像渲染方法和装置,涉及图像处理领域,以解决效果好的滤镜由于包含太多的图层,难以保证实时渲染的问题。技术方案包括:接收用户输入的待渲染图像的渲染指示;获取待渲染图像的各像素对应的原始像素值;根据预设映射表获取每个原始像素值对应的目标像素值;根据所述目标像素值修改所述待渲染图像,得到渲染后的图像。本发明实施例提供的技术方案可以应用在图像、视频等编辑过程中。