
手部图像生成方法、装置、电子设备及可读存储介质.pdf

Ch****91


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
手部图像生成方法、装置、电子设备及可读存储介质.pdf
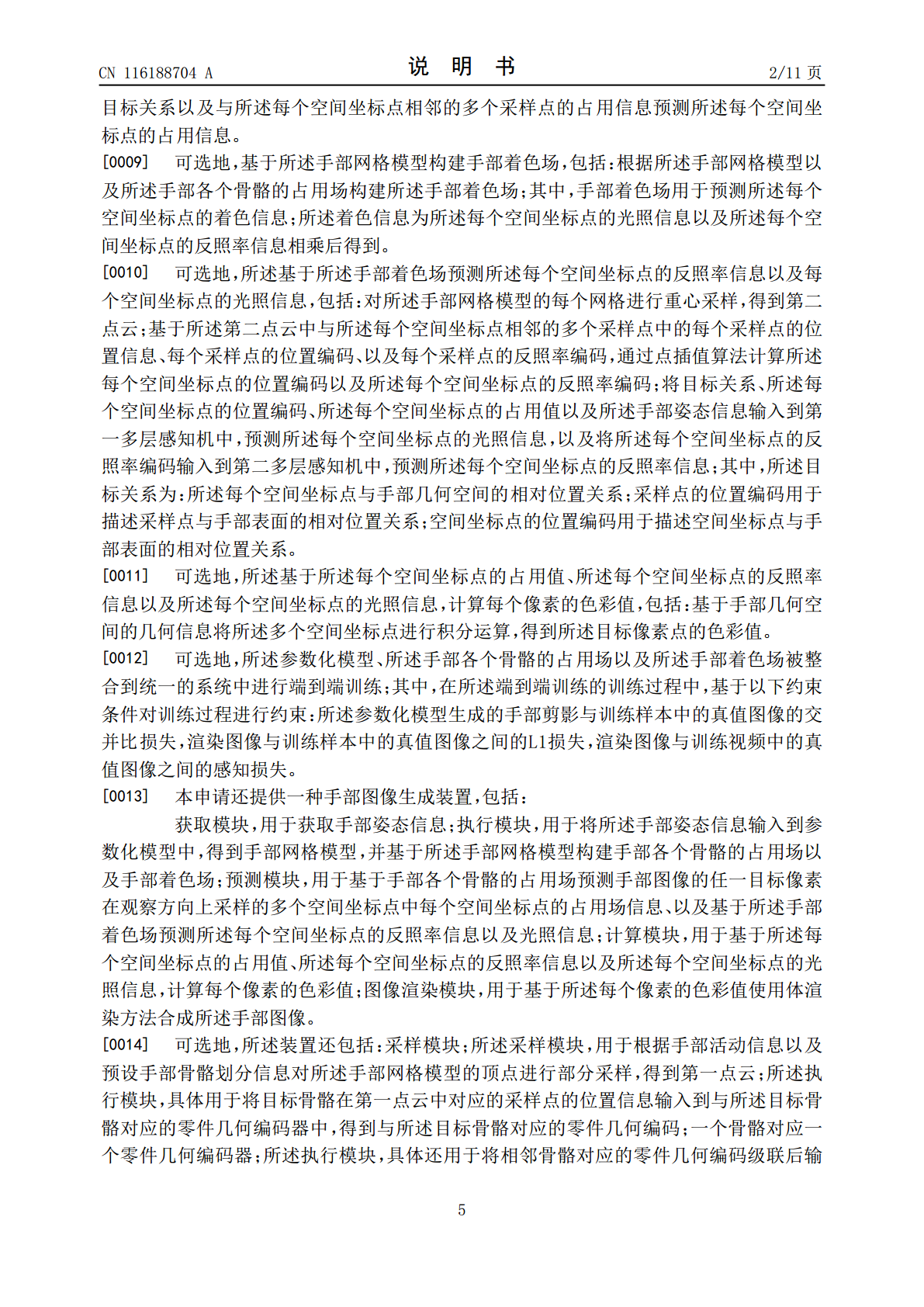
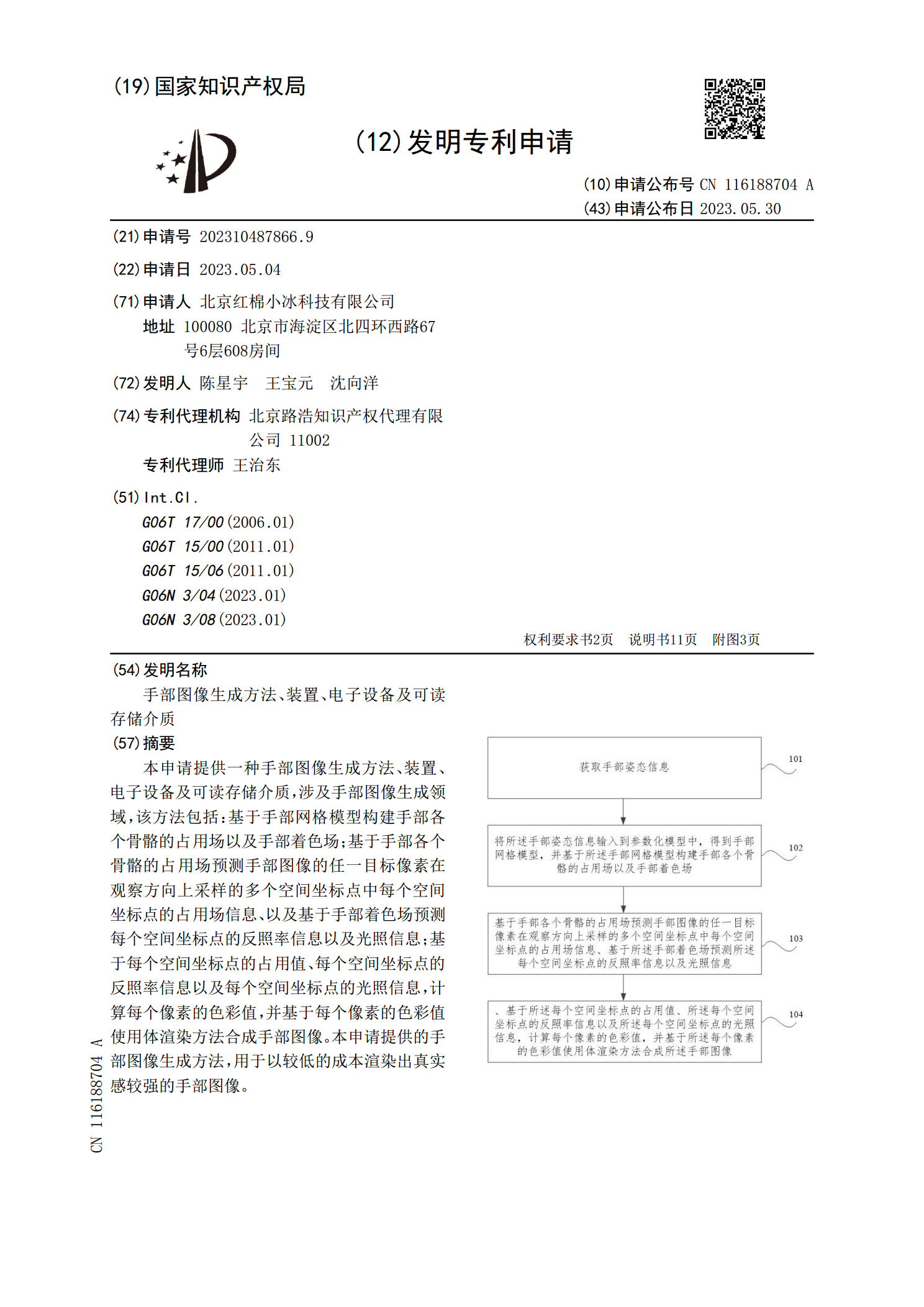
本申请提供一种手部图像生成方法、装置、电子设备及可读存储介质,涉及手部图像生成领域,该方法包括:基于手部网格模型构建手部各个骨骼的占用场以及手部着色场;基于手部各个骨骼的占用场预测手部图像的任一目标像素在观察方向上采样的多个空间坐标点中每个空间坐标点的占用场信息、以及基于手部着色场预测每个空间坐标点的反照率信息以及光照信息;基于每个空间坐标点的占用值、每个空间坐标点的反照率信息以及每个空间坐标点的光照信息,计算每个像素的色彩值,并基于每个像素的色彩值使用体渲染方法合成手部图像。本申请提供的手部图像生成方法
图像生成方法、装置、电子设备及可读存储介质.pdf
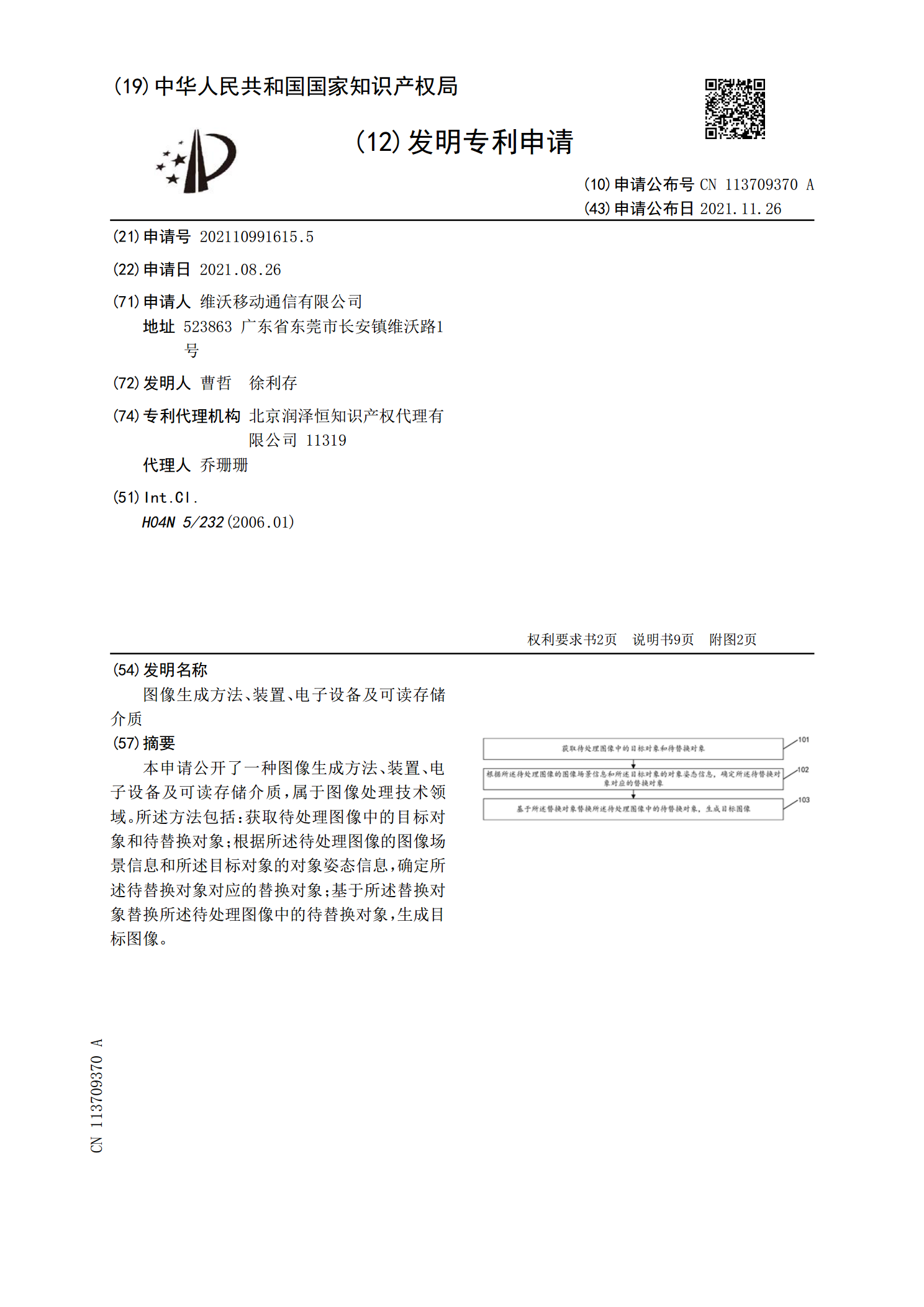
本申请公开了一种图像生成方法、装置、电子设备及可读存储介质,属于图像处理技术领域。所述方法包括:获取待处理图像中的目标对象和待替换对象;根据所述待处理图像的图像场景信息和所述目标对象的对象姿态信息,确定所述待替换对象对应的替换对象;基于所述替换对象替换所述待处理图像中的待替换对象,生成目标图像。

图像生成方法、图像生成装置、存储介质与电子设备.pdf
本公开提供一种图像生成方法、图像生成装置、计算机可读存储介质与电子设备,涉及图像处理技术领域。该图像生成方法包括:响应于用户选择虚拟曝光模式,确定单张曝光时间;根据预设曝光时间和所述单张曝光时间确定目标数量,所述目标数量为生成长曝光图像所需的原始图像的数量,所述目标数量至少为两张;通过所述单张曝光时间获取所述目标数量的原始图像;合成所述原始图像,生成所述长曝光图像。本公开通过虚拟曝光模式生成长曝光图像,即能够避免曝光时间过长导致图像过曝的情况,还可以保留有效的物体运动轨迹。
生成视频的方法、装置、电子设备及可读存储介质.pdf
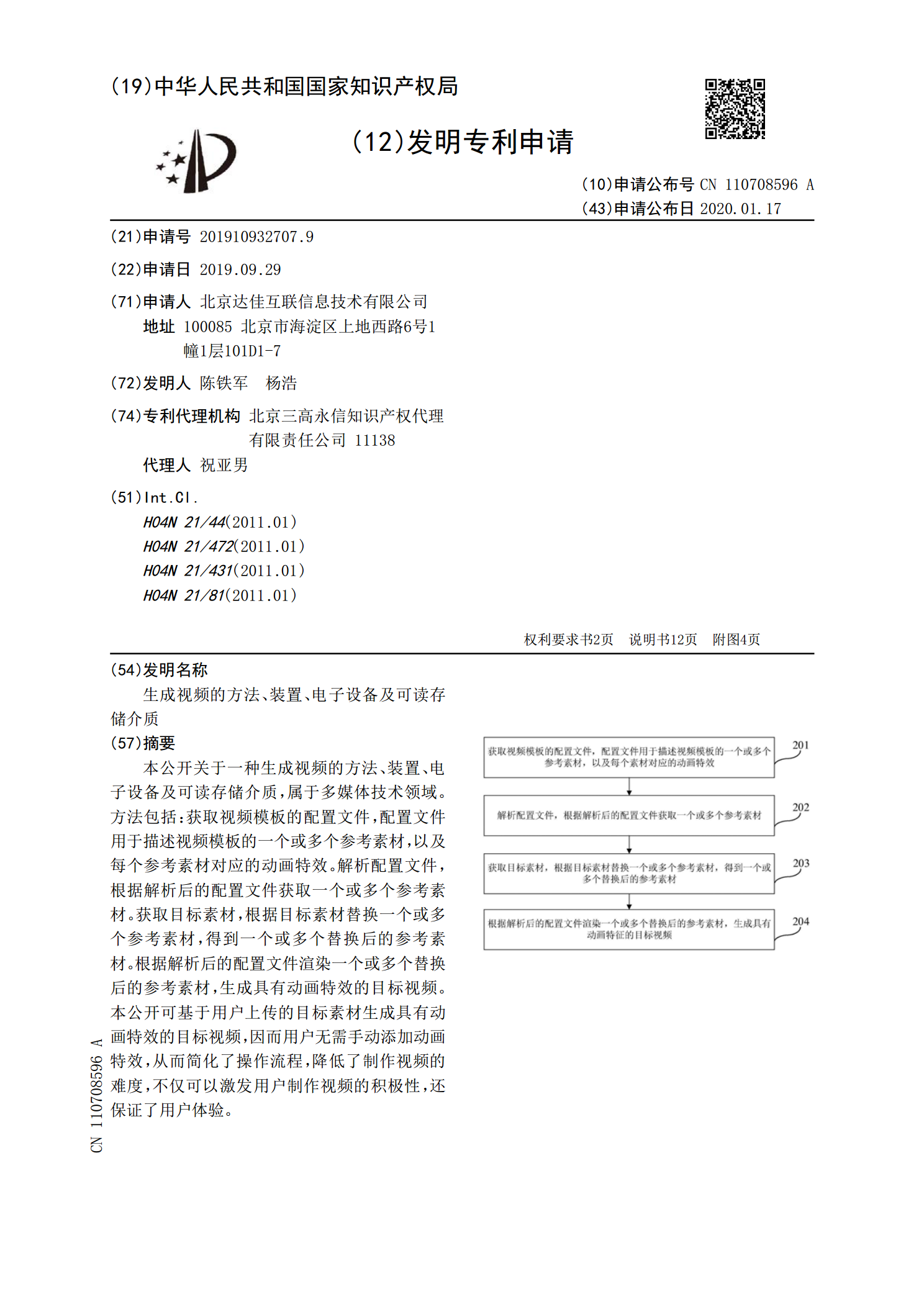
本公开关于一种生成视频的方法、装置、电子设备及可读存储介质,属于多媒体技术领域。方法包括:获取视频模板的配置文件,配置文件用于描述视频模板的一个或多个参考素材,以及每个参考素材对应的动画特效。解析配置文件,根据解析后的配置文件获取一个或多个参考素材。获取目标素材,根据目标素材替换一个或多个参考素材,得到一个或多个替换后的参考素材。根据解析后的配置文件渲染一个或多个替换后的参考素材,生成具有动画特效的目标视频。本公开可基于用户上传的目标素材生成具有动画特效的目标视频,因而用户无需手动添加动画特效,从而简化了
图像对焦方法、装置、电子设备及可读存储介质.pdf
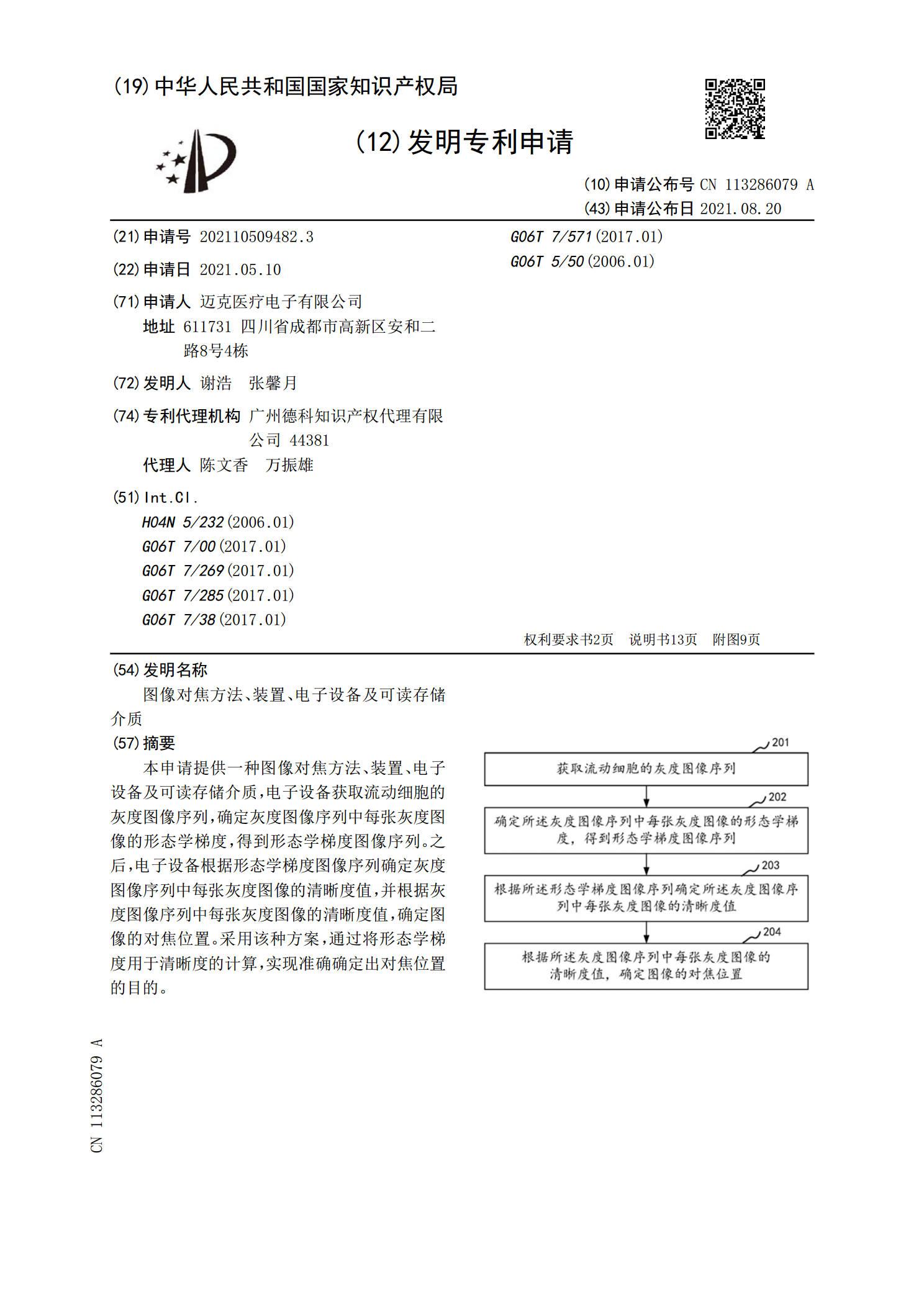
本申请提供一种图像对焦方法、装置、电子设备及可读存储介质,电子设备获取流动细胞的灰度图像序列,确定灰度图像序列中每张灰度图像的形态学梯度,得到形态学梯度图像序列。之后,电子设备根据形态学梯度图像序列确定灰度图像序列中每张灰度图像的清晰度值,并根据灰度图像序列中每张灰度图像的清晰度值,确定图像的对焦位置。采用该种方案,通过将形态学梯度用于清晰度的计算,实现准确确定出对焦位置的目的。