
一种状态切换方法及装置.pdf

文库****坚白


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种状态切换方法及装置.pdf
本发明实施例提供了一种状态切换方法及装置,其方法包括:当智能设备处于预设工作模式时,获取目标对象的位置,其中,工作模式包括智能设备跟随目标对象的工作模式或者智能设备引领目标对象的工作模式;根据目标对象的位置,控制智能设备处于行进状态或停驻等待状态。通过本发明实施例提供的技术方案,更多的考虑了用户的情况,实现了智能设备状态的自动切换,进而提高了用户体验。

一种状态切换方法和装置.pdf
本发明公开了一种状态切换方法和装置,该方法包括:接收对页面第一状态图标的选择操作;其中,页面同时显示若干个第一状态图标,每个所述第一状态图标用于对应地表示状态;以及控制页面状态标识图标滑动至与所述选择操作关联的第一状态图标的位置,以切换至所述选择操作关联的第一状态图标对应的状态;其中,其余第一状态图标保留在所述页面上。利用本发明,在接收到对页面显示的第一状态图标的选择操作时,控制状态标识图标滑动至被选中的第一状态图标,以表示切换至相应的状态,以直接、快速地进行状态切换。
一种小区状态切换方法及装置.pdf
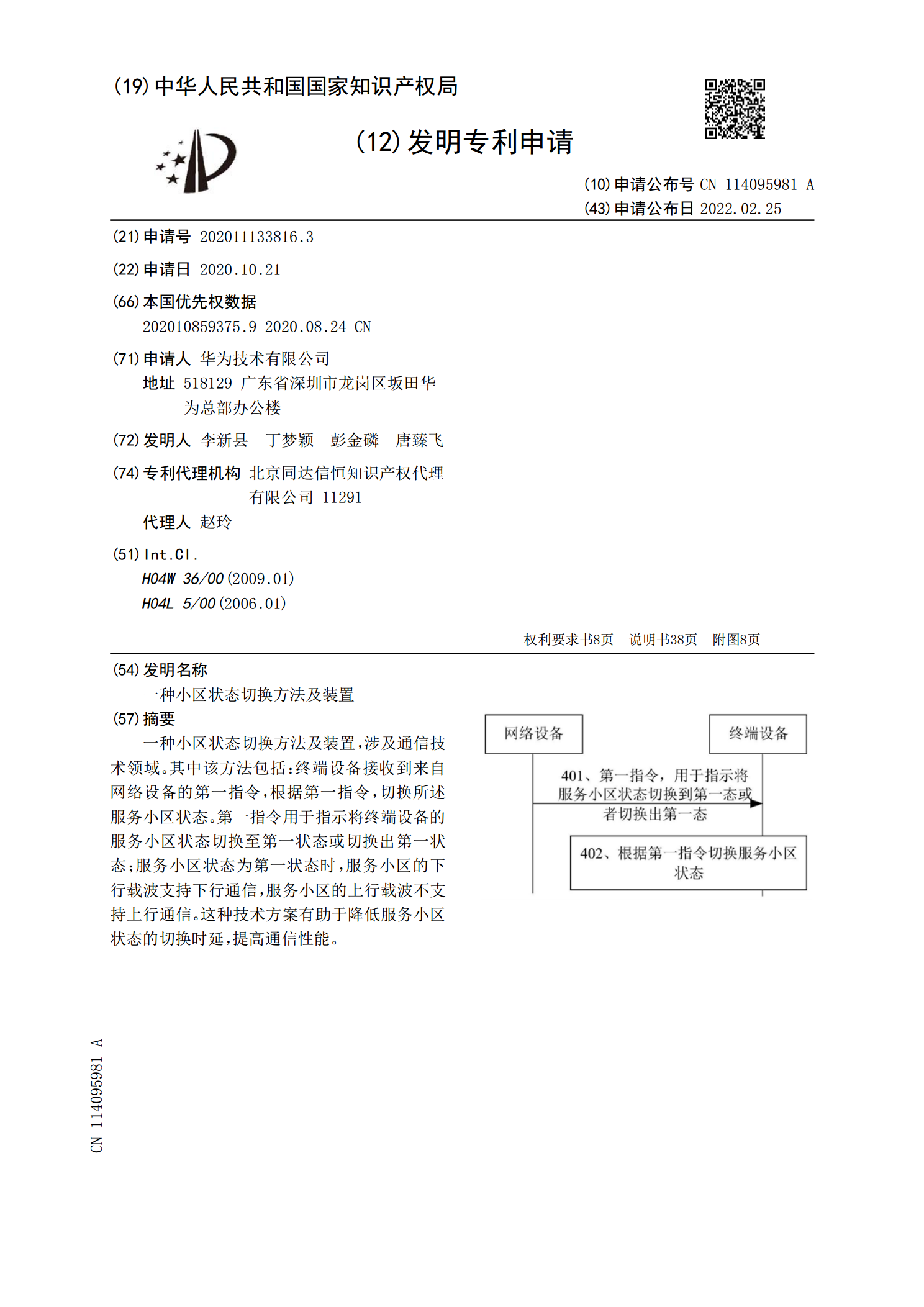
一种小区状态切换方法及装置,涉及通信技术领域。其中该方法包括:终端设备接收到来自网络设备的第一指令,根据第一指令,切换所述服务小区状态。第一指令用于指示将终端设备的服务小区状态切换至第一状态或切换出第一状态;服务小区状态为第一状态时,服务小区的下行载波支持下行通信,服务小区的上行载波不支持上行通信。这种技术方案有助于降低服务小区状态的切换时延,提高通信性能。

一种显示状态切换的方法和装置.pdf
本发明公开了一种显示状态切换的方法和设备,其中该方法包括:根据目标区域内用户与本设备的距离,确定目标用户;当所述目标用户停留时间到达预设时长时,获取所述目标用户的人脸图像;根据预设的切换判定标准检测所述人脸图像,若符合所述预设的切换判定标准,由信息显示状态切换为镜面显示状态。本发明能够实现显示状态的切换,提高显示设备的利用效率。

工作状态切换方法及装置.pdf
本申请提供一种工作状态切换方法及装置,其中,该方法包括:当低功率广域网通信模块处于工作状态,蜂窝移动通信模块处于休眠状态时,在接收到云端发来的第一唤醒指令后,唤醒蜂窝移动通信模块向蜂窝移动通信基站发起连接,在连接成功后,控制蜂窝移动通信模块切换为工作状态,控制低功率广域网通信模块切换为休眠状态;当蜂窝移动通信模块处于工作状态,低功率广域网通信模块处于休眠状态时,唤醒低功率广域网通信模块向低功率广域网通信基站发起连接,在连接成功后,控制低功率广域网通信模块切换为工作状态,控制蜂窝移动通信模块切换为休眠状态。