
一种无人机集群协同攻防对抗决策方法.pdf

景山****魔王


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人机集群协同攻防对抗决策方法.pdf
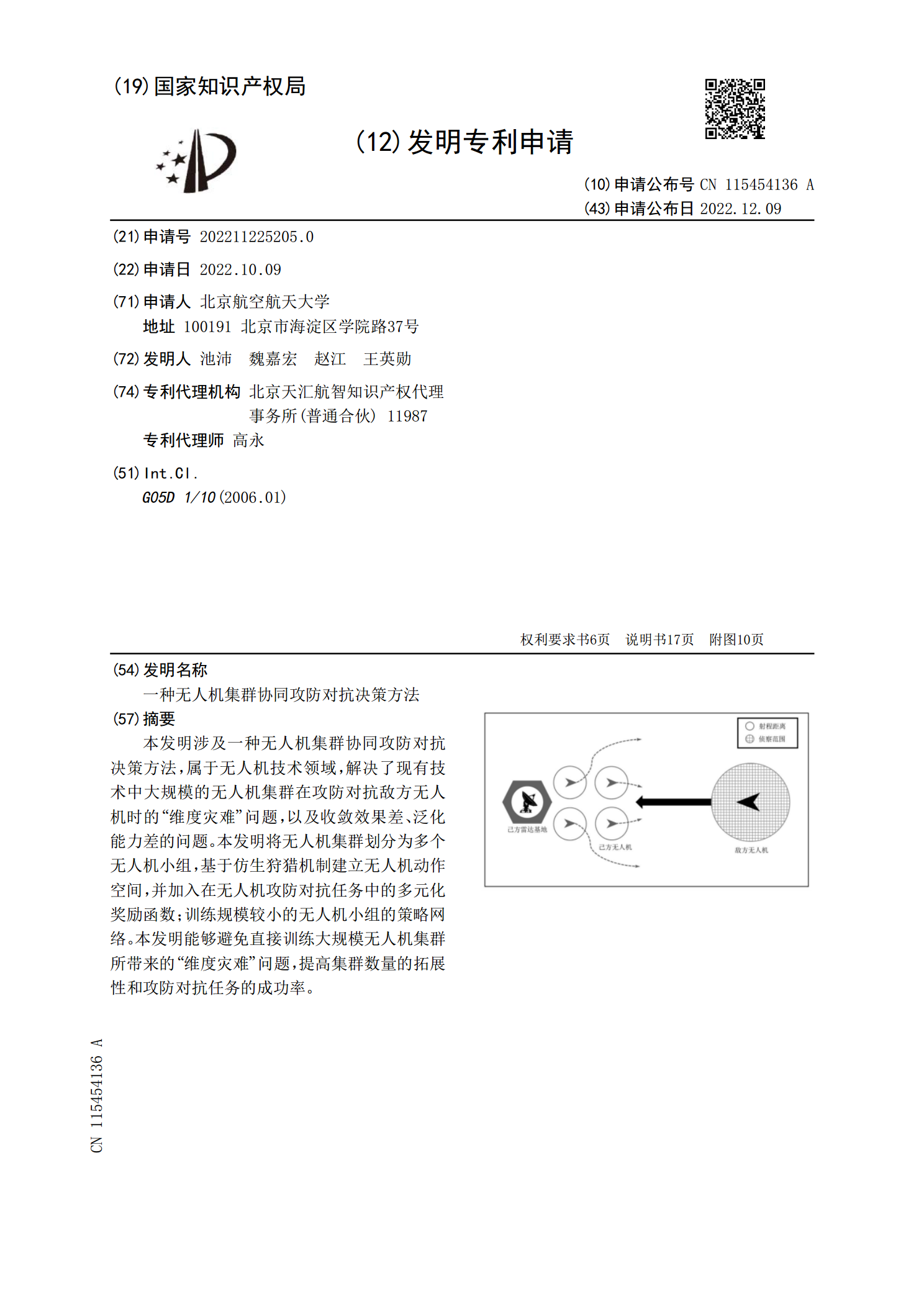
本发明涉及一种无人机集群协同攻防对抗决策方法,属于无人机技术领域,解决了现有技术中大规模的无人机集群在攻防对抗敌方无人机时的“维度灾难”问题,以及收敛效果差、泛化能力差的问题。本发明将无人机集群划分为多个无人机小组,基于仿生狩猎机制建立无人机动作空间,并加入在无人机攻防对抗任务中的多元化奖励函数;训练规模较小的无人机小组的策略网络。本发明能够避免直接训练大规模无人机集群所带来的“维度灾难”问题,提高集群数量的拓展性和攻防对抗任务的成功率。
基于策略集合MADDPG多无人机协同攻防对抗方法.pdf
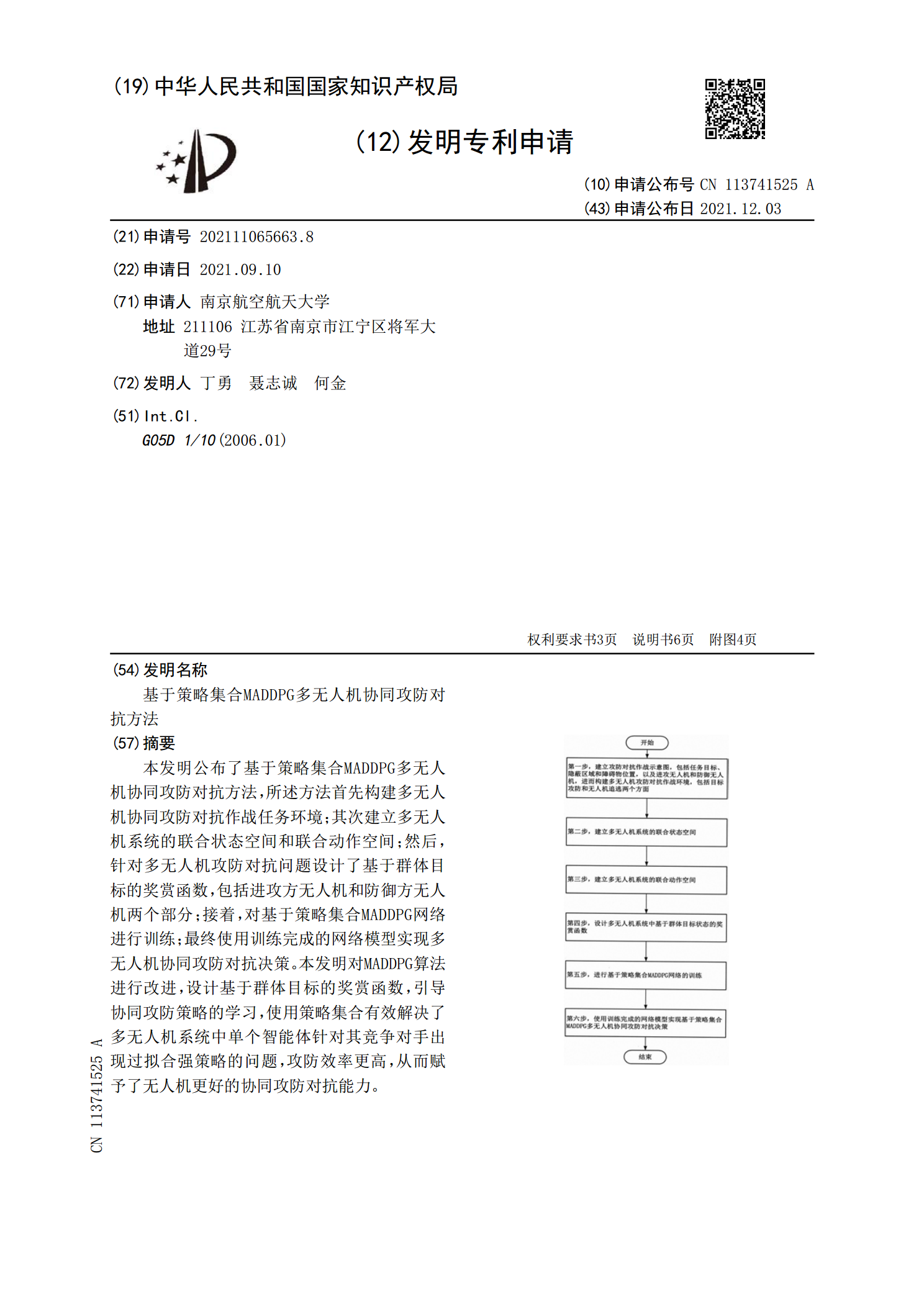
本发明公布了基于策略集合MADDPG多无人机协同攻防对抗方法,所述方法首先构建多无人机协同攻防对抗作战任务环境;其次建立多无人机系统的联合状态空间和联合动作空间;然后,针对多无人机攻防对抗问题设计了基于群体目标的奖赏函数,包括进攻方无人机和防御方无人机两个部分;接着,对基于策略集合MADDPG网络进行训练;最终使用训练完成的网络模型实现多无人机协同攻防对抗决策。本发明对MADDPG算法进行改进,设计基于群体目标的奖赏函数,引导协同攻防策略的学习,使用策略集合有效解决了多无人机系统中单个智能体针对其竞争对手

一种无人机蜂群协同对抗决策方法及系统.pdf
本发明提供一种无人机蜂群协同对抗决策方法及系统,所述方法包括步骤1:建立包含地面高价值目标的三维战场环境;步骤2:建立无人机的运动模型;步骤3:建立无人机的攻击模型;步骤4:求出每架无人机的最优策略集合;步骤5:建立动态博弈模型;步骤6:在所述最优策略集集合中,根据所述动态博弈模型确定无人机的最佳响应策略。本发明综合考虑HVT,建立了基于权重的综合考虑双方无人机之间的夹角、HVT暴露面积和攻击距离的攻击模型,求解无人机的最佳策略集,建立三种无人机蜂群协同对抗博弈模型,求解无人机的最佳响应策略,以有效提高进

无人机集群协同对抗最优策略研究.docx
无人机集群协同对抗最优策略研究随着无人机技术的不断发展以及应用场景的不断拓展,无人机集群协同对抗越来越成为了研究的热点。在无人机集群协同对抗中,如何制定最优策略成为了一个重要的问题。本文将会针对这一问题进行研究和讨论。一、无人机集群协同对抗的概述无人机集群协同对抗是指一组无人机群体协同作战,对抗敌方目标。无人机集群通过互相协调和帮助,实现对目标的监测、打击、侦查等多种任务的完成。无人机集群协同对抗优势主要体现在三个方面:1.作战能力强。无人机集群可以协同完成多种任务,能够实现空中侦察、攻击、防空等战术。2

基于人工势场的无人机集群协同对抗问题研究.docx
基于人工势场的无人机集群协同对抗问题研究摘要:无人机集群协同对抗是当前热点领域之一。本文基于人工势场方法,针对无人机集群协同对抗问题进行了研究。首先,介绍了人工势场方法的原理及应用,然后分析了无人机集群协同对抗的特点和难点。接着,提出了基于人工势场的无人机集群协同对抗算法,并对其进行了仿真实验验证。实验结果表明,在不同参数设置下,该算法能够有效提升无人机集群的协同作战能力,具有一定的实际应用价值。关键词:人工势场;无人机集群协同对抗;算法;实验验证。引言:随着无人机技术的发展和应用范围的扩大,无人机集群协