
家用服务机器人的使用方法.pdf

海昌****姐淑


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
家用服务机器人的使用方法.pdf
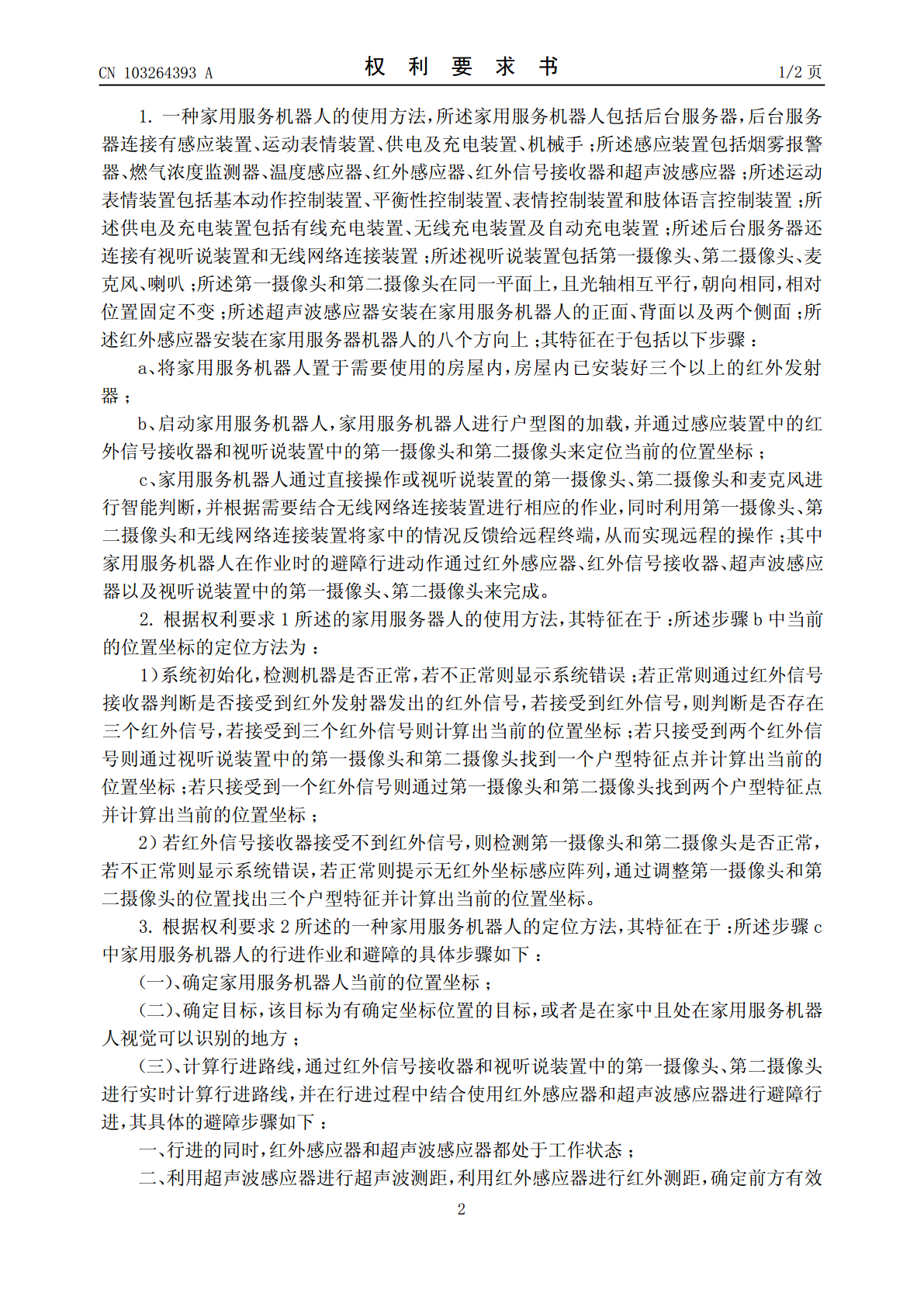
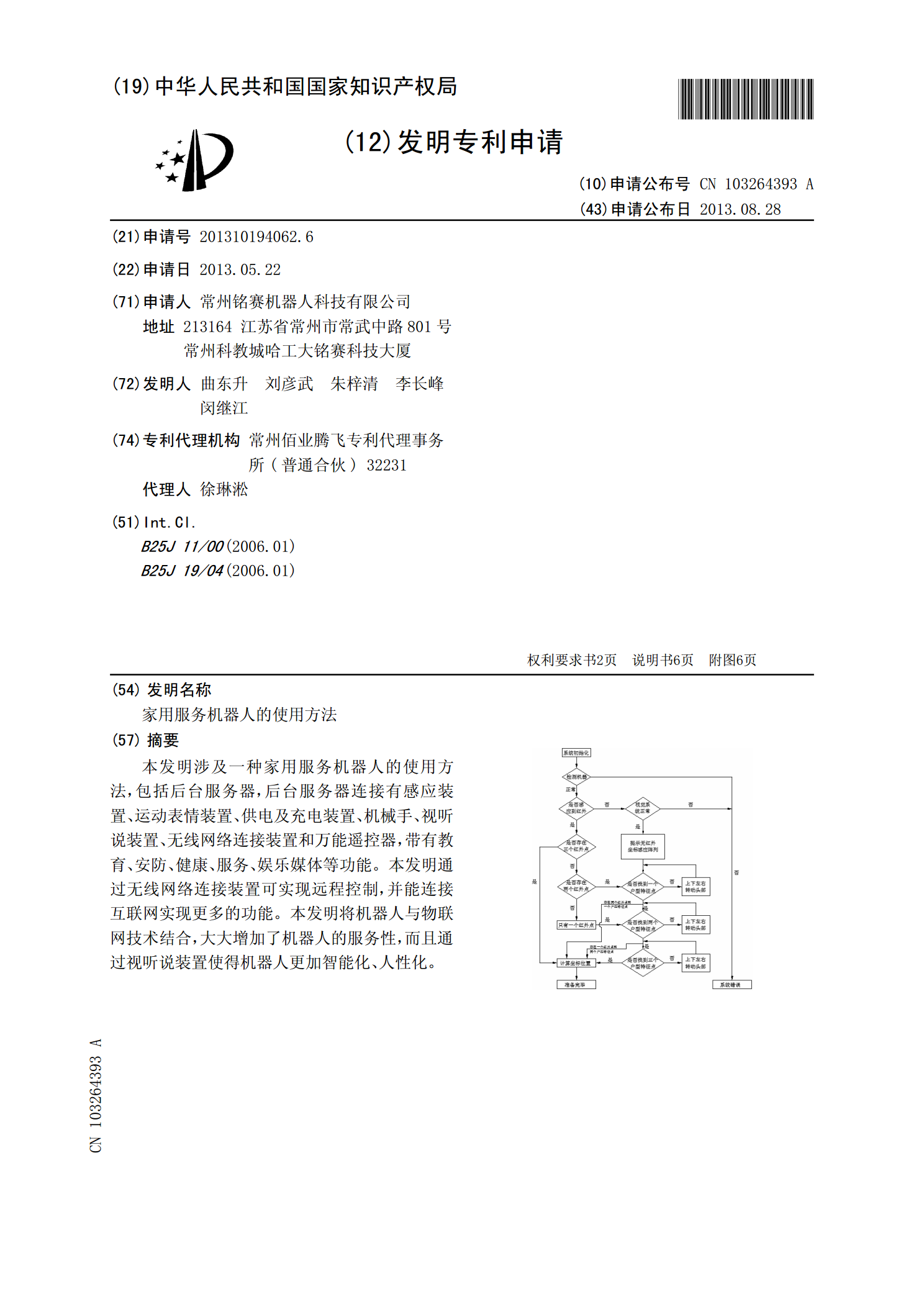
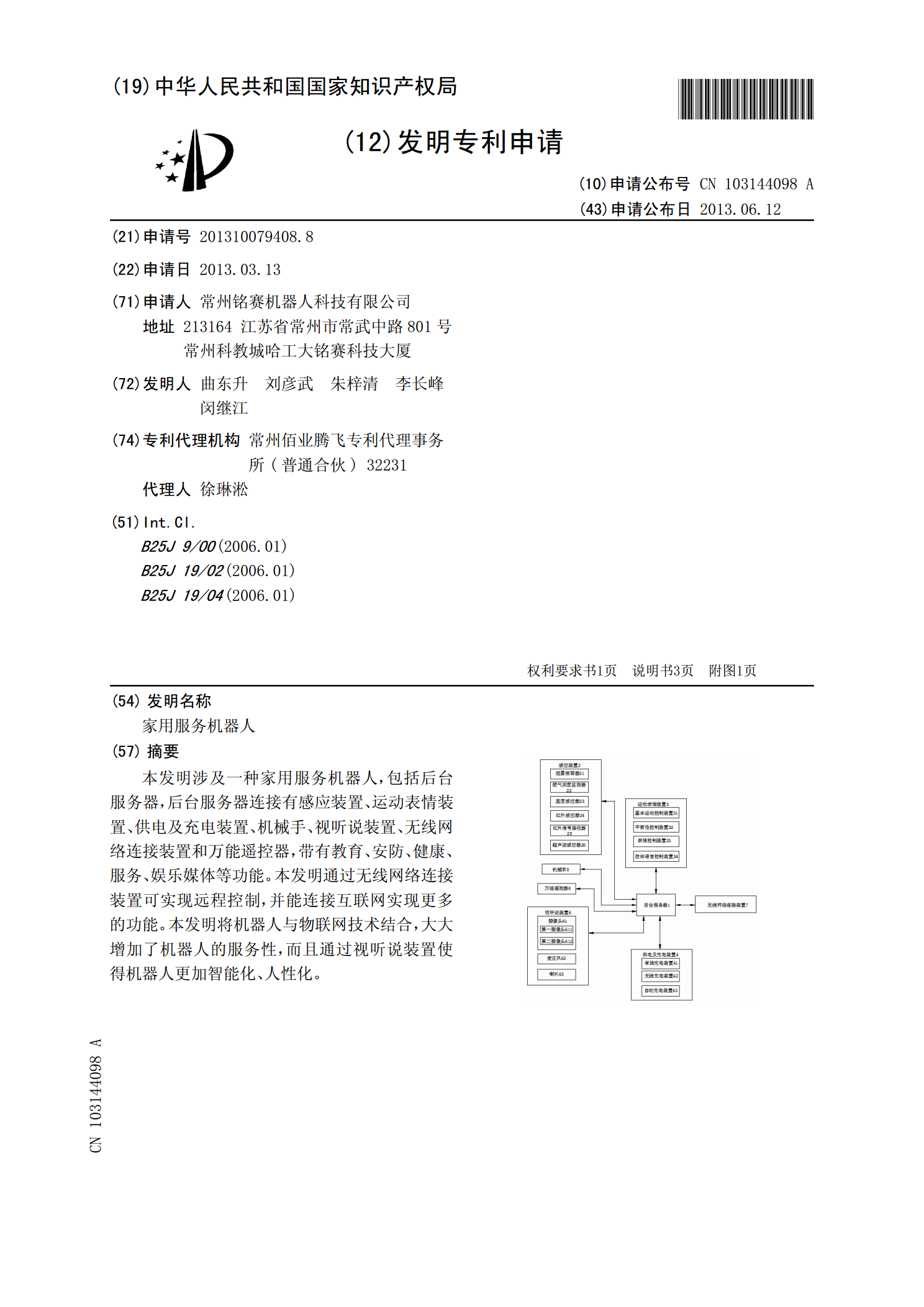
本发明涉及一种家用服务机器人的使用方法,包括后台服务器,后台服务器连接有感应装置、运动表情装置、供电及充电装置、机械手、视听说装置、无线网络连接装置和万能遥控器,带有教育、安防、健康、服务、娱乐媒体等功能。本发明通过无线网络连接装置可实现远程控制,并能连接互联网实现更多的功能。本发明将机器人与物联网技术结合,大大增加了机器人的服务性,而且通过视听说装置使得机器人更加智能化、人性化。

一种共享智能家用服务机器人及其使用方法.pdf
本发明提供一种共享智能家用服务机器人及其使用方法,其中信息收发模块接收从业主客户端发出的服务预约信息和从物业中心发出的物业指令信息并形成对应的服务请求数据;家用服务模块根据服务预约信息和物业指令信息进行服务并形成服务工作数据;数据上传模块将服务请求数据和服务工作数据上传至物业中心;密钥匹配模块通过密钥方式与业主匹配。通过物业中心配备智能家用服务机器人并通过密钥匹配的方式使业主自主使用智能家用服务机器人,使得业主无需购买智能机器人便可以享受服务;通过业主下达服务预约信息进行预约,使得智能家用服务机器人能够更
家用服务机器人.pdf
本发明涉及一种家用服务机器人,包括后台服务器,后台服务器连接有感应装置、运动表情装置、供电及充电装置、机械手、视听说装置、无线网络连接装置和万能遥控器,带有教育、安防、健康、服务、娱乐媒体等功能。本发明通过无线网络连接装置可实现远程控制,并能连接互联网实现更多的功能。本发明将机器人与物联网技术结合,大大增加了机器人的服务性,而且通过视听说装置使得机器人更加智能化、人性化。
家用服务机器人项目商业计划书.pdf
家用服务机器人项目商业计划书一、项目概述本项目主要致力于开发一款家用服务机器人。随着人口老龄化的加剧,以及生活节奏的加快,越来越多的人对于家庭服务的依赖度和需求度都在不断提高。因此,在家庭中引入家用服务机器人,将能够很好地满足人们日常家居生活的各种需求,解决人们的生活痛点,提高人们的生活质量,成为市场中的一款刚性需求产品。二、市场分析根据调查数据,目前国内家用服务机器人的市场规模达到了约200亿元,而且随着人口老龄化问题的日趋严重,国内家用服务机器人市场的增长空间还十分巨大,未来几年市场规模将会呈加速增长

家用健身单车使用方法.docx
家用健身单车使用方法家用健身单车使用方法健身车在运动科学领域叫做“功率自行车”,可以调整运动时的强度,起到健身的效果,所以人们把它称为健身车。以下是小编精心准备的家用健身单车使用方法,大家可以参考以下内容哦!家用健身单车使用方法【1】第一步:调节单车首先调节车座高度,这个高度通常以自己站在地面抬起大腿便与地面水平时的高度为准,其次调节车座于把手的距离越一臂的长度第二部:阻尼的增减向左边减小阻尼,向右边增大阻尼,食指和中指扣住向上拔为刹车。第三部:上车前,首先将携带塞入鞋子中,并根据自己鞋子大小调整脚套,第