
基于扩展卡尔曼滤波的无人旋翼机组合导航控制.docx

努力****星驰

1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于扩展卡尔曼滤波的无人旋翼机组合导航控制.docx
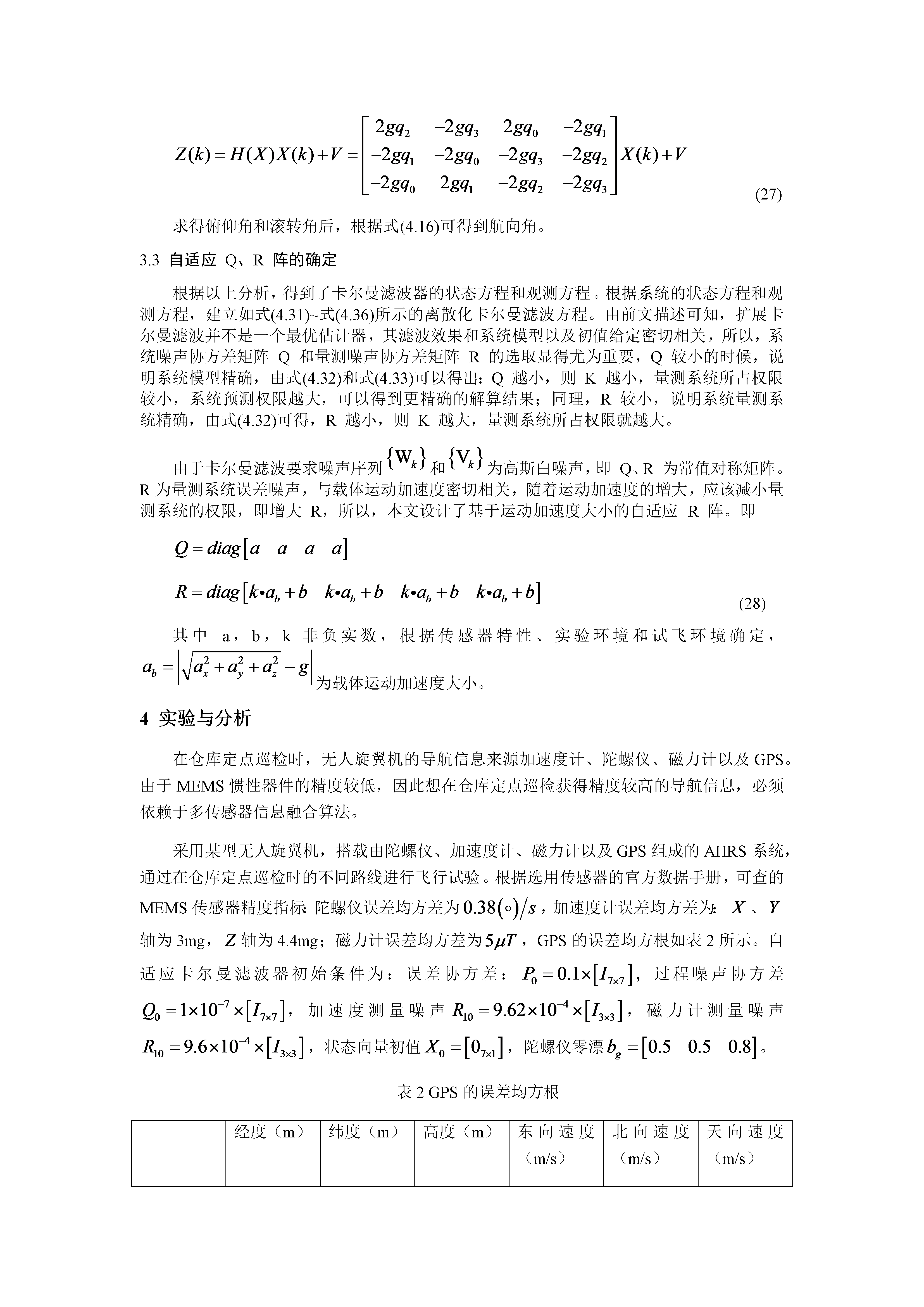
基于扩展卡尔曼滤波的无人旋翼机组合导航控制某某某,某某(地址)摘要:讨论了自转旋翼机的自主导航控制问题。首先,分析自转旋翼机无人机的动力学特性,建立数学模型。提出了基于扩展卡尔曼滤波的无人旋翼机组合导航控制算法。针对自转旋翼机无人机航姿系统特性进行分析与解算,并针对其缺陷设计了组合导航控制系统,利用扩展卡尔曼滤波方法对解算后姿态数据进行融合。最后,在MATLAB环境中搭建仿真平台,验证了基于扩展卡尔曼滤波的无人旋翼机组合导航控制算法的有效性。关键词:自转旋翼机,组合导航,扩展卡尔曼滤波0引言无人驾驶自转旋
基于扩展卡尔曼滤波的无人旋翼机组合导航控制.pdf
基于扩展卡尔曼滤波的无人旋翼机组合导航控制某某某,某某(地址)摘要:讨论了自转旋翼机的自主导航控制问题。首先,分析自转旋翼机无人机的动力学特性,建立数学模型。提出了基于扩展卡尔曼滤波的无人旋翼机组合导航控制算法。针对自转旋翼机无人机航姿系统特性进行分析与解算,并针对其缺陷设计了组合导航控制系统,利用扩展卡尔曼滤波方法对解算后姿态数据进行融合。最后,在MATLAB环境中搭建仿真平台,验证了基于扩展卡尔曼滤波的无人旋翼机组合导航控制算法的有效性。关键词:自转旋翼机,组合导航,扩展卡尔曼滤波0引言无人驾驶自转旋
基于扩展卡尔曼滤波的无人旋翼机组合导航控制.pdf
基于扩展卡尔曼滤波的无人旋翼机组合导航控制某某某,某某(地址)摘要:讨论了自转旋翼机的自主导航控制问题。首先,分析自转旋翼机无人机的动力学特性,建立数学模型。提出了基于扩展卡尔曼滤波的无人旋翼机组合导航控制算法。针对自转旋翼机无人机航姿系统特性进行分析与解算,并针对其缺陷设计了组合导航控制系统,利用扩展卡尔曼滤波方法对解算后姿态数据进行融合。最后,在MATLAB环境中搭建仿真平台,验证了基于扩展卡尔曼滤波的无人旋翼机组合导航控制算法的有效性。关键词:自转旋翼机,组合导航,扩展卡尔曼滤波0引言无人驾驶自转旋
基于扩展卡尔曼滤波的无人旋翼机组合导航控制.docx
基于扩展卡尔曼滤波的无人旋翼机组合导航控制某某某,某某(地址)摘要:讨论了自转旋翼机的自主导航控制问题。首先,分析自转旋翼机无人机的动力学特性,建立数学模型。提出了基于扩展卡尔曼滤波的无人旋翼机组合导航控制算法。针对自转旋翼机无人机航姿系统特性进行分析与解算,并针对其缺陷设计了组合导航控制系统,利用扩展卡尔曼滤波方法对解算后姿态数据进行融合。最后,在MATLAB环境中搭建仿真平台,验证了基于扩展卡尔曼滤波的无人旋翼机组合导航控制算法的有效性。关键词:自转旋翼机,组合导航,扩展卡尔曼滤波0引言无人驾驶自转旋

基于扩展卡尔曼滤波的无人旋翼机组合导航控制.docx
基于扩展卡尔曼滤波的无人旋翼机组合导航控制某某某某某(地址)摘要:讨论了自转旋翼机的自主导航控制问题。首先分析自转旋翼机无人机的动力学特性建立数学模型。提出了基于扩展卡尔曼滤波的无人旋翼机组合导航控制算法。针对自转旋翼机无人机航姿系统特性进行分析与解算并针对其缺陷设计了组合导航控制系统利用扩展卡尔曼滤波方法对解算后姿态数据进行融合。最后在MATLAB环境中搭建仿真平台验证了基于扩展卡尔曼滤波的无人旋翼机组合导航控制算法的有效性。关键词:自转旋翼机组合导航扩展卡尔曼滤波0引言无人驾驶自转旋翼机(简称无人