
矿井提升机控制系统培训资料.ppt

Jo****31

1/10
2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共73页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
矿井提升机控制系统培训资料.ppt
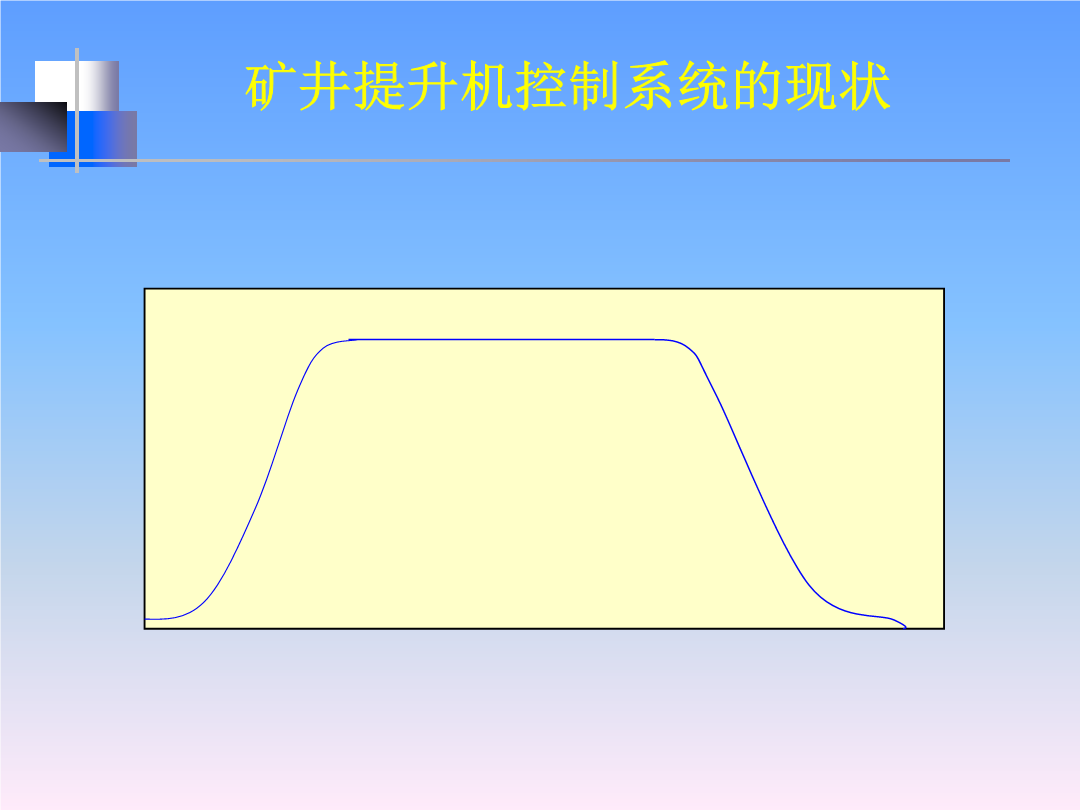
矿井提升机控制系统目录一、概述矿井提升机作为矿山企业的关键机电设备对矿山的高效、安全生产与经济的营运具有极其重要的作用它不仅装机容量大是矿山的主要耗电大户而且它作为一个典型的位势力矩负载要求其拖动电动机在其机械特性的四个象限内频繁周期性地进行启动、制动和反向运行。反映其运行状态的速度图和力图是根据设计的提升能力和安全规程确定的对其在运行过程中的加速度、减速度以及各运行阶段的行程和最后的停车位置都有精确的要求和严格的限制。因此提升机始终是电力拖动与控制的典型应用装置和研究对象正确

基于PLC的矿井提升机控制系统.docx
27摘要矿井被称作地下矿井系统的咽喉是井下与地面最重要的通道。矿井提升机承担着矿井与井下人员、矿料、设备等物资运输的重任是整个矿井系统中的核心部分矿井提升机的安全可靠运行至关重要。所以设计一套安全可靠的矿井提升机控制系统具有极大的意义。PLC出现后以其显著优点迅速成为工业生产控制系统的主流发展方向其可靠性高抗干扰能力强;编程简单使用方便;控制程序可变具有很好的柔性功能完善;扩充方便组合灵活极大减少控制系统设计及施工工作量;体积小重量轻;非常适用“机电一体化”设备。基于PLC设计矿井提升机控制系统
基于PLC的矿井提升机控制系统.docx
27摘要矿井被称作地下矿井系统的咽喉是井下与地面最重要的通道。矿井提升机承担着矿井与井下人员、矿料、设备等物资运输的重任是整个矿井系统中的核心部分矿井提升机的安全可靠运行至关重要。所以设计一套安全可靠的矿井提升机控制系统具有极大的意义。PLC出现后以其显著优点迅速成为工业生产控制系统的主流发展方向其可靠性高抗干扰能力强;编程简单使用方便;控制程序可变具有很好的柔性功能完善;扩充方便组合灵活极大减少控制系统设计及施工工作量;体积小重量轻;非常适用“机电一体化”设备。基于PLC设计矿井提升机控制系统
基于PLC的矿井提升机控制系统.docx
27摘要矿井被称作地下矿井系统的咽喉是井下与地面最重要的通道。矿井提升机承担着矿井与井下人员、矿料、设备等物资运输的重任是整个矿井系统中的核心部分矿井提升机的安全可靠运行至关重要。所以设计一套安全可靠的矿井提升机控制系统具有极大的意义。PLC出现后以其显著优点迅速成为工业生产控制系统的主流发展方向其可靠性高抗干扰能力强;编程简单使用方便;控制程序可变具有很好的柔性功能完善;扩充方便组合灵活极大减少控制系统设计及施工工作量;体积小重量轻;非常适用“机电一体化”设备。基于PLC设计矿井提升机控制系统
矿井提升机变频调速控制系统设计.doc
XinjiangInstituteofEngineering机械工程系|毕业设计说明书论文题目矿井提升机变频调速控制系统设计学科专业矿山机电10-7-(4)作者姓名姚胜辉指导教师薛风日期2013年4月18日新疆工程学院机械工程系毕业设计任务书学生姓名姚胜辉专业班