
EtherCAT主从同步方法.pdf

玄静****写意


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

EtherCAT主从同步方法.pdf
EtherCAT主从同步方法1.时钟漂移问题如图所示主站和从站通过EtherCAT总线连接设主站的晶振频率为f0从站1晶振频率f1从站2晶振频率f2假如在3个设备中同时设置一个定时长度为T的周期性定时器由于晶振频率的微小差异不可能使得3个设备同时完成定时器触发。由于是周期性的这微小的触发时间不一致会累积起来直到出现质变例如在

基于FPGA的EtherCAT主从站设计与实现的开题报告.docx
基于FPGA的EtherCAT主从站设计与实现的开题报告一、选题背景EtherCAT(EthernetforControlAutomationTechnology)是一种实时以太网通信协议,其主要特点在于具有高效率、低延迟、可扩展性好等特点。因此,在工控领域中得到了广泛的应用。FPGA(FieldProgrammableGateArray)技术作为一种可编程逻辑器件,因为具有灵活性高、可重构性强、处理速度快的特点,引起了工控领域的广泛关注。因此,将EtherCAT和FPGA相结合,设计并实现一套基于FPG

并发主从同步方法及装置.pdf
本发明公开了一种并发主从同步方法及装置。所述方法包括:接收来自主数据库的数据同步任务,数据同步任务包括可并行执行的第一操作和需串行执行的第二操作;在从数据库处于第一状态下,将数据同步任务中的第一操作分发给多个第一线程中一个第一线程执行,由第二线程执行数据同步任务中的第二操作。上述方案可以利用从数据库的多个第一线程执行数据同步任务,提高了数据同步速度,克服了从数据库单线程执行数据同步任务造成的主数据库与从数据库中数据显著不同步问题,同时保证了在日志文件按照接收数据同步任务的顺序记录数据操作。
基于令牌的并发主从同步方法及装置.pdf
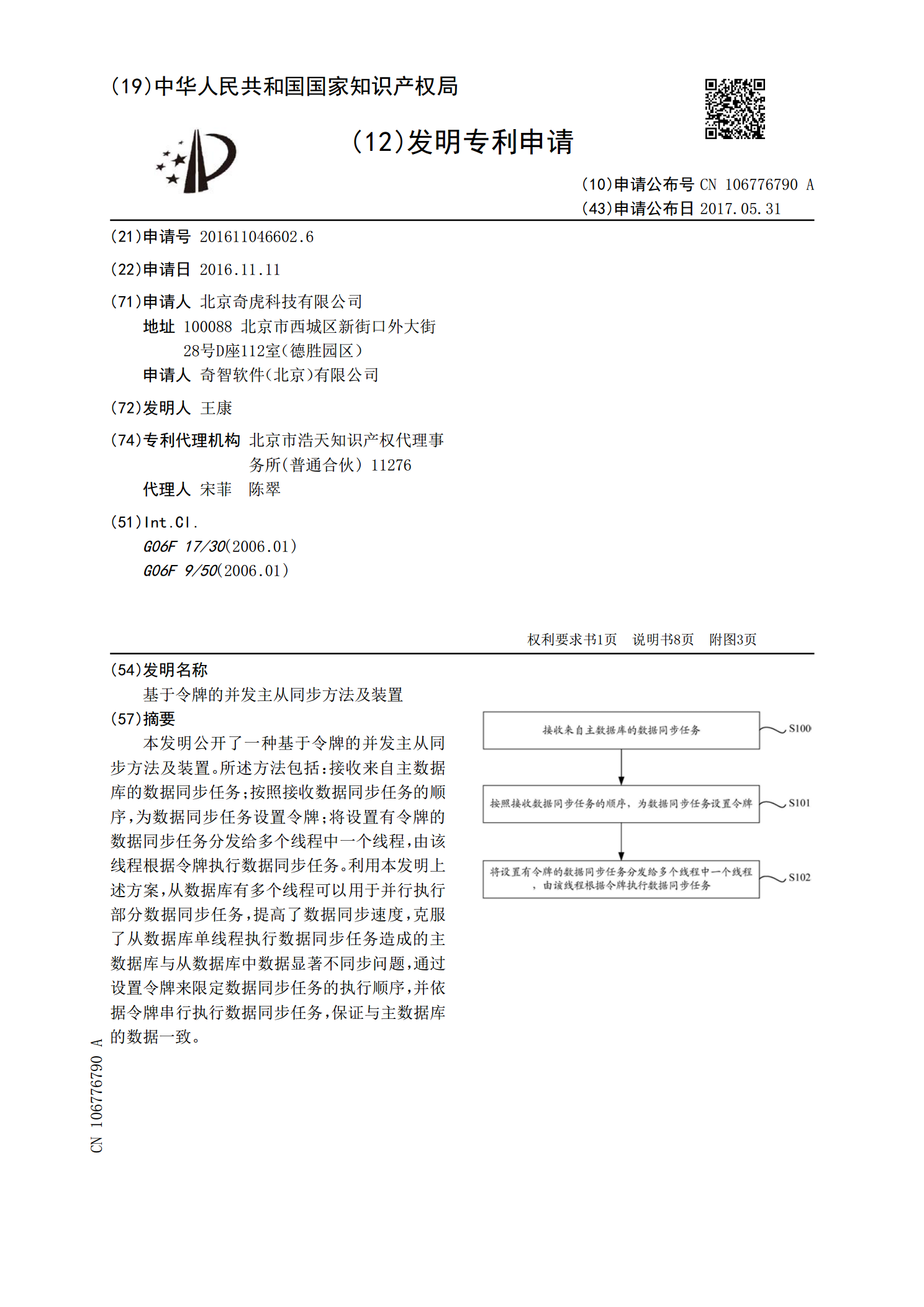
本发明公开了一种基于令牌的并发主从同步方法及装置。所述方法包括:接收来自主数据库的数据同步任务;按照接收数据同步任务的顺序,为数据同步任务设置令牌;将设置有令牌的数据同步任务分发给多个线程中一个线程,由该线程根据令牌执行数据同步任务。利用本发明上述方案,从数据库有多个线程可以用于并行执行部分数据同步任务,提高了数据同步速度,克服了从数据库单线程执行数据同步任务造成的主数据库与从数据库中数据显著不同步问题,通过设置令牌来限定数据同步任务的执行顺序,并依据令牌串行执行数据同步任务,保证与主数据库的数据一致。

嵌入式EtherCAT主从站通信控制器的应用研究.docx
嵌入式EtherCAT主从站通信控制器的应用研究一、引言随着信息技术的不断发展和应用的广泛推广,嵌入式智能控制技术在工业控制领域得到了广泛应用。其中,嵌入式EtherCAT主从站通信控制器作为一种高效的通信控制技术,在近年来逐渐得到了越来越广泛的应用和认可。本文将从什么是嵌入式EtherCAT主从站通信控制器、其原理、应用场景等方面进行阐述,并结合实例讲解其应用技术。二、什么是嵌入式EtherCAT主从站通信控制器嵌入式EtherCAT主从站通信控制器是一种基于以太网的高性能实时控制技术。它将以太网进行了