
一种仿生智能机器鱼.pdf

是雁****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种仿生智能机器鱼.pdf
本发明公开了一种仿生智能机器鱼,具有流线型外壳,以生物鱼的形态结构分为鱼头、鱼身、鱼尾,所述鱼身包括第一部分、第二部分、第三部分、第四部分,其中,第一部分与第二部分之间固定连接,第二部分与第三部分之间通过第一驱动机构转动连接,第三部分与第四部分之间通过第二驱动机构转动连接,第四部分与鱼尾之间通过第三驱动机构转动连接。所述仿生机器鱼体内设置了控制模块、无线充电模块、沉浮机构、红外传感器、压力传感器和九轴姿态传感器,保证仿生机器达到鱼智能控制的目的。

一种仿生智能机器鱼的鱼头机构.pdf
本发明公开了一种仿生智能机器鱼的鱼头机构,包括仿生物鱼的流线型鱼头壳体,所述鱼头壳体内部设置有控制模块和充电电池,充电电池与控制模块之间电连接;鱼头壳体下部设置有无线充电模块的接收端机构,无线充电模块的接收端机构与充电电池之间电连接,接收端机构包括电量检测模块、接收线圈、无线充电接收模块和接收端防水外壳。通过设置无线充电模块,从而替代了仿生机器鱼的传统充电模式,达到全水下作业的目的,避免了定时将仿生机器鱼打捞充电的麻烦。
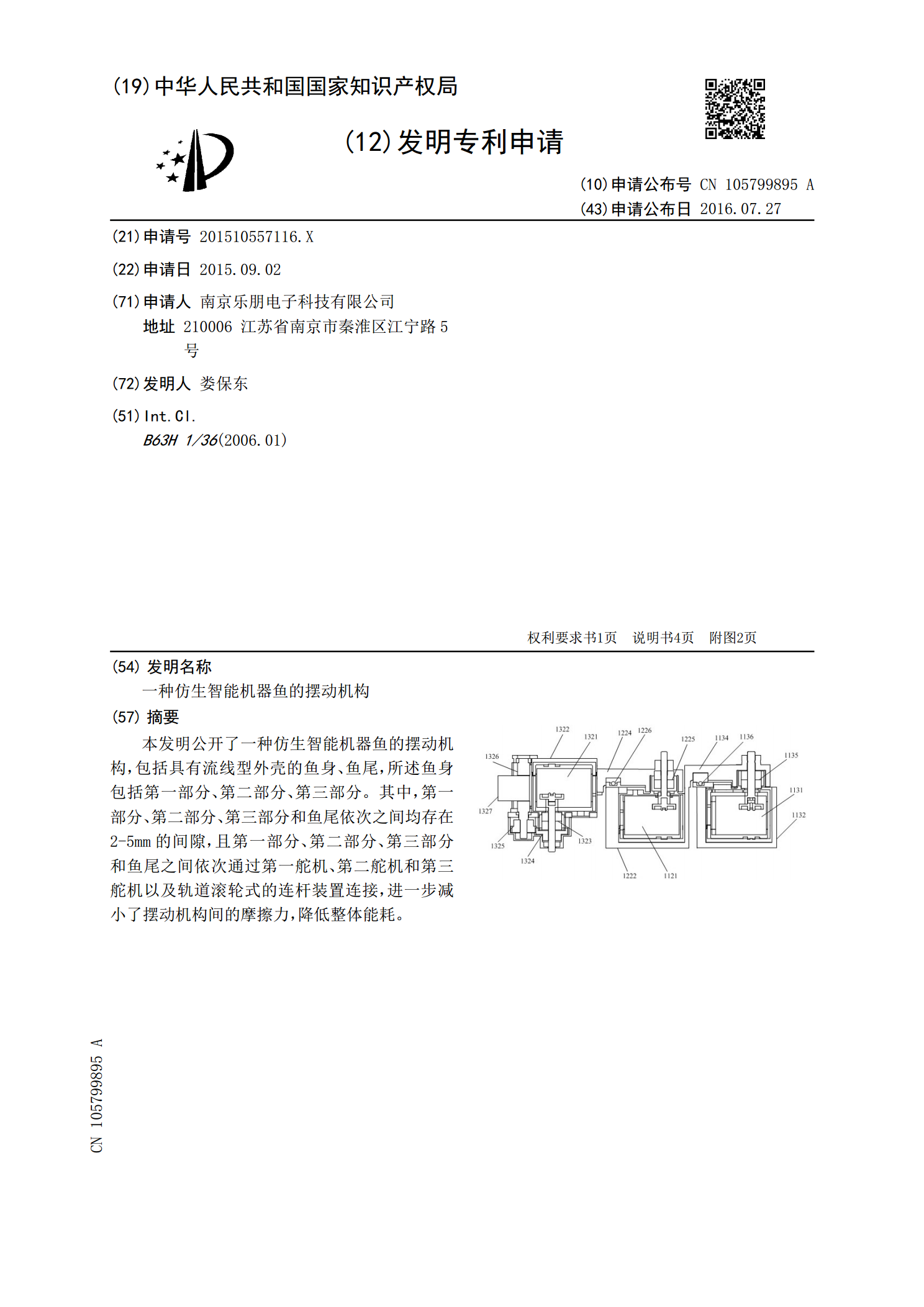
一种仿生智能机器鱼的摆动机构.pdf
本发明公开了一种仿生智能机器鱼的摆动机构,包括具有流线型外壳的鱼身、鱼尾,所述鱼身包括第一部分、第二部分、第三部分。其中,第一部分、第二部分、第三部分和鱼尾依次之间均存在2-5mm的间隙,且第一部分、第二部分、第三部分和鱼尾之间依次通过第一舵机、第二舵机和第三舵机以及轨道滚轮式的连杆装置连接,进一步减小了摆动机构间的摩擦力,降低整体能耗。

一种仿生智能机器鱼的控制系统.pdf
一种仿生智能机器鱼的控制系统,包括顶级控制系统、主控制系统和副控制系统,顶级控制系统包含主控制系统,主控制系统包含副控制系统。副控制系统包括红外感知避障功能模块、水体压力测试功能模块、鱼尾摆动控制功能模块等主要功能模块。主控制系统除了具有副控制系统的所有功能模块外,还具有鱼眼控制功能模块、鱼嘴控制功能模块和电源管理功能模块。顶级控制系统除了具有主、副控制系统的所有功能模块外,还包括个人计算机、手机控制设备等终端控制设备。副控制系统为备用应急系统,当主控制系统出现错误或规定操作以外的状况使仿生智能机器鱼失去
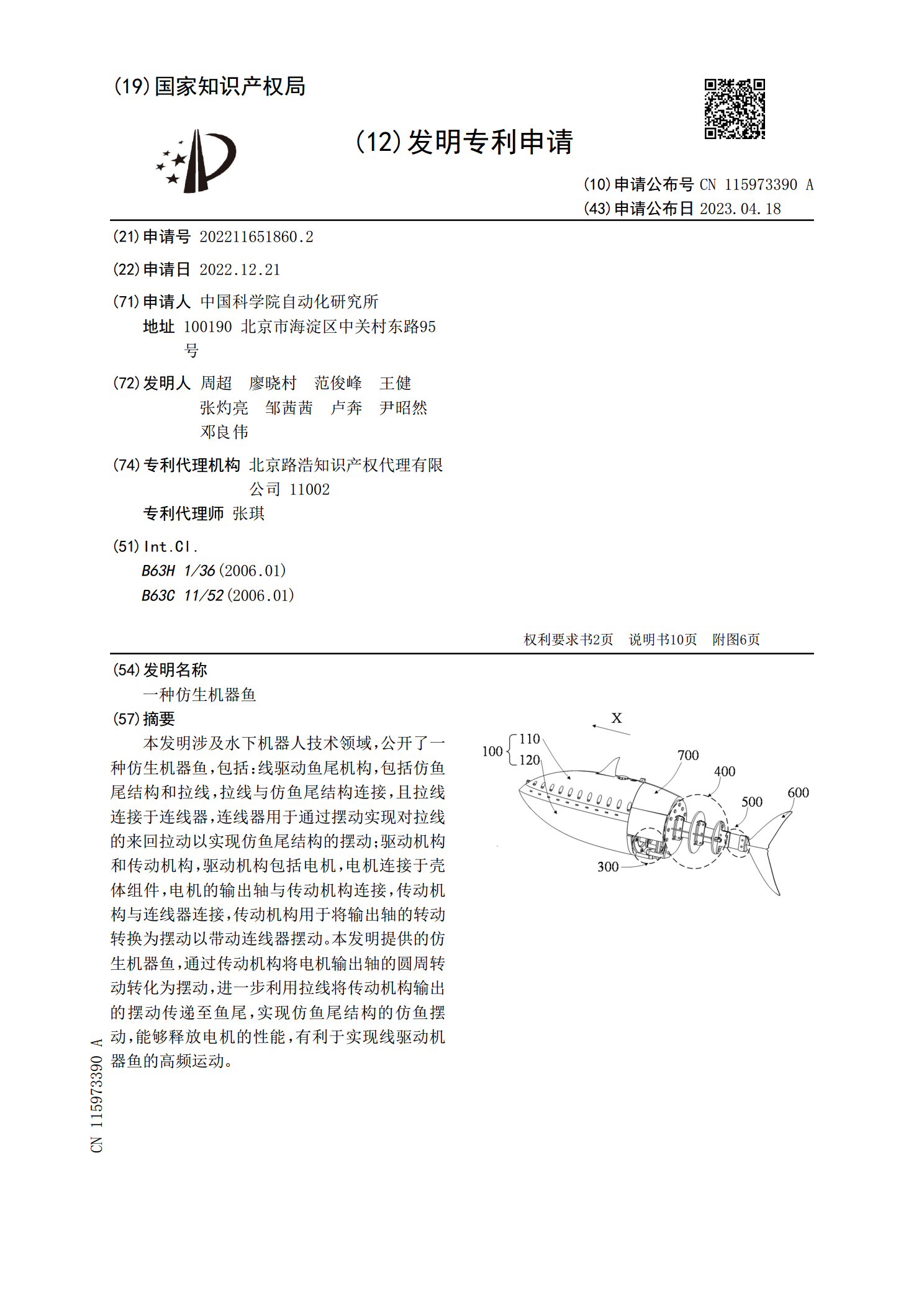
一种仿生机器鱼.pdf
本发明涉及水下机器人技术领域,公开了一种仿生机器鱼,包括:线驱动鱼尾机构,包括仿鱼尾结构和拉线,拉线与仿鱼尾结构连接,且拉线连接于连线器,连线器用于通过摆动实现对拉线的来回拉动以实现仿鱼尾结构的摆动;驱动机构和传动机构,驱动机构包括电机,电机连接于壳体组件,电机的输出轴与传动机构连接,传动机构与连线器连接,传动机构用于将输出轴的转动转换为摆动以带动连线器摆动。本发明提供的仿生机器鱼,通过传动机构将电机输出轴的圆周转动转化为摆动,进一步利用拉线将传动机构输出的摆动传递至鱼尾,实现仿鱼尾结构的仿鱼摆动,能够释