
一种人体腋下推拿按摩智能机器人.pdf

盼易****君a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种人体腋下推拿按摩智能机器人.pdf
本发明涉及一种人体腋下推拿按摩智能机器人,包括行走底座、移动装置、漫步装置、升降调节装置、主体按摩装置和局部按摩装置,且升降调节装置和主体按摩装置的数量均为二,移动装置位于行走底座和漫步装置之间,且移动装置与行走底座固连,升降调节装置分别沿漫步装置的横向中心轴线对称布置,且升降调节装置底端与移动装置相连接,主体按摩装置固定在升降调节装置正上方,局部按摩装置分别对称位于主体按摩装置的左右两侧,且局部按摩装置与升降调节装置固连。本发明可对人体腋下进行推拿按摩和风冷散汗,且推拿按摩全面,按摩效果明显,按摩舒适度

一种全面型可调式腋下按摩智能机器人.pdf
本发明涉及一种全面型可调式腋下按摩智能机器人,包括升降调节装置、主体按摩装置和局部按摩装置,且局部按摩装置的数量为二;所述的主体按摩装置固定在升降调节装置正上方,局部按摩装置分别对称位于主体按摩装置的左右两侧,且局部按摩装置与升降调节装置固连。本发明可对人体腋下进行推拿按摩和风冷散汗,且推拿按摩全面,按摩效果明显,按摩舒适度高,对人体腋下起到了很好的保健作用,也一定程度上的促进了人体的身心健康。

一种人体腋下局部按摩装置.pdf
本发明涉及一种人体腋下局部按摩装置,包括支架、固定轴、局部按摩头、支撑轴、固定环、振动电机和振动弹簧,支架分别对称布置在局部按摩头两侧,且局部按摩头和支架上端之间通过固定轴进行连接,支撑轴位于局部按摩头正下方,振动电机位于支撑轴正上方,且振动电机均匀沿支撑轴轴向方向呈直线布置,振动电机下端通过固定环安装在支撑轴上,振动电机上端与振动弹簧一端相连接,振动弹簧另一端与局部按摩头内侧壁相连接。本发明通过振动电机的振动带动振动弹簧的抖动,从而实现局部按摩头的振动,起到了振动按摩的效果,局部按摩装置主要用于对人体腋
一种人体上肢推拿按摩装置.pdf
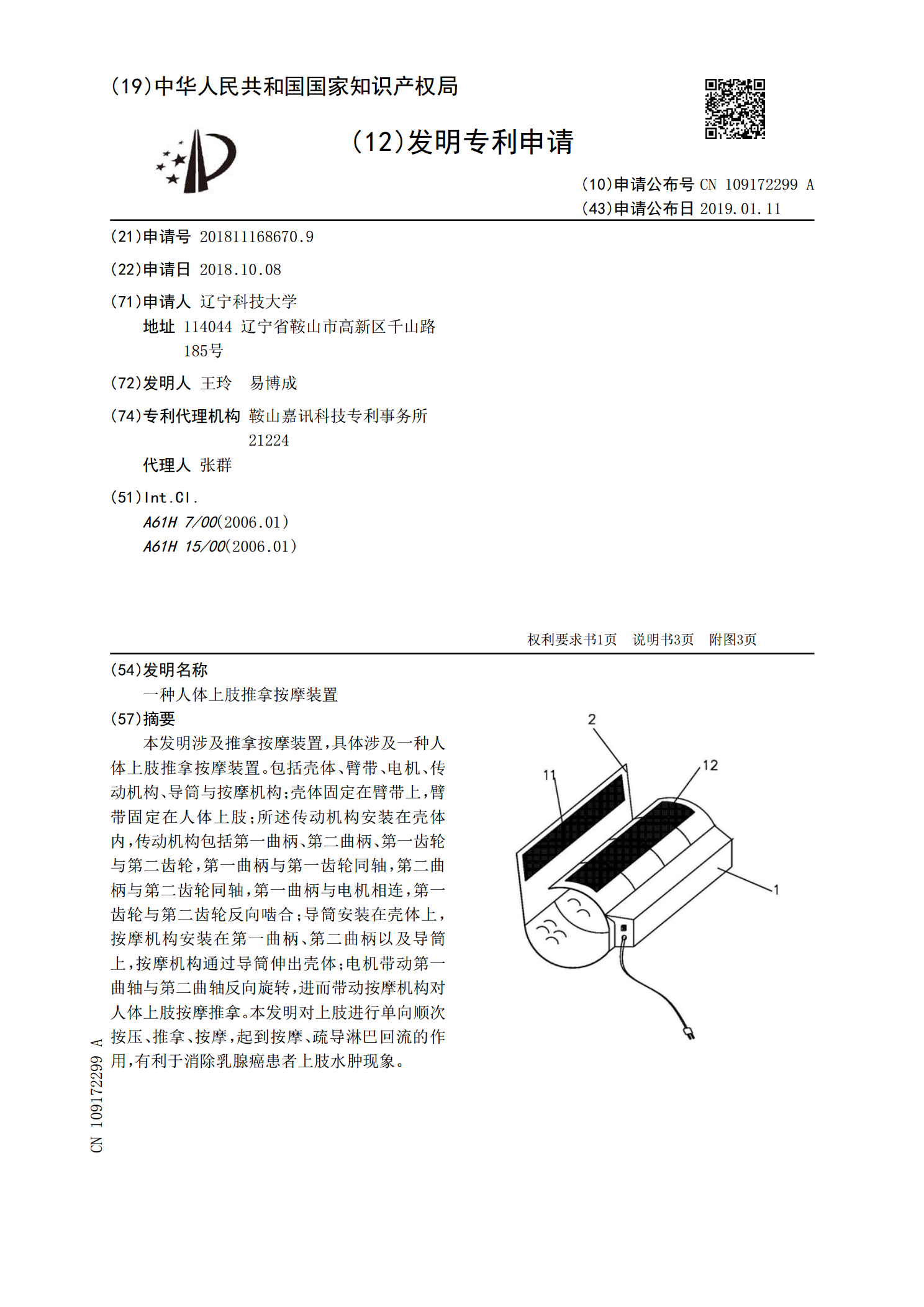
本发明涉及推拿按摩装置,具体涉及一种人体上肢推拿按摩装置。包括壳体、臂带、电机、传动机构、导筒与按摩机构;壳体固定在臂带上,臂带固定在人体上肢;所述传动机构安装在壳体内,传动机构包括第一曲柄、第二曲柄、第一齿轮与第二齿轮,第一曲柄与第一齿轮同轴,第二曲柄与第二齿轮同轴,第一曲柄与电机相连,第一齿轮与第二齿轮反向啮合;导筒安装在壳体上,按摩机构安装在第一曲柄、第二曲柄以及导筒上,按摩机构通过导筒伸出壳体;电机带动第一曲轴与第二曲轴反向旋转,进而带动按摩机构对人体上肢按摩推拿。本发明对上肢进行单向顺次按压、推

一种人体手部医疗保健按摩智能机器人.pdf
本发明涉及一种人体手部医疗保健按摩智能机器人,包括夹座、外壳、传动装置、振动装置、按摩滚筒和支撑装置;所述的夹座位于外壳正下方,且夹座与外壳固连,传动装置位于外壳内部后侧端,振动装置位于传动装置前方,且振动装置与外壳顶端相固定,按摩滚筒后端与传动装置相连接,按摩滚筒上端与振动装置相连接,按摩滚筒前端通过支撑装置进行固定,且支撑装置与外壳上端面相连接。本发明同时进行采用旋转滚动按摩和激振振动按摩两种模式对人体手部进行保健按摩,且两种按摩模式也可分开单独进行,选择性大,按摩全面性高,且按摩效果好。