
基于云计算平台的车辆全局优化控制方法、系统、车辆和云计算平台.pdf

映雁****魔王

1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于云计算平台的车辆全局优化控制方法、系统、车辆和云计算平台.pdf
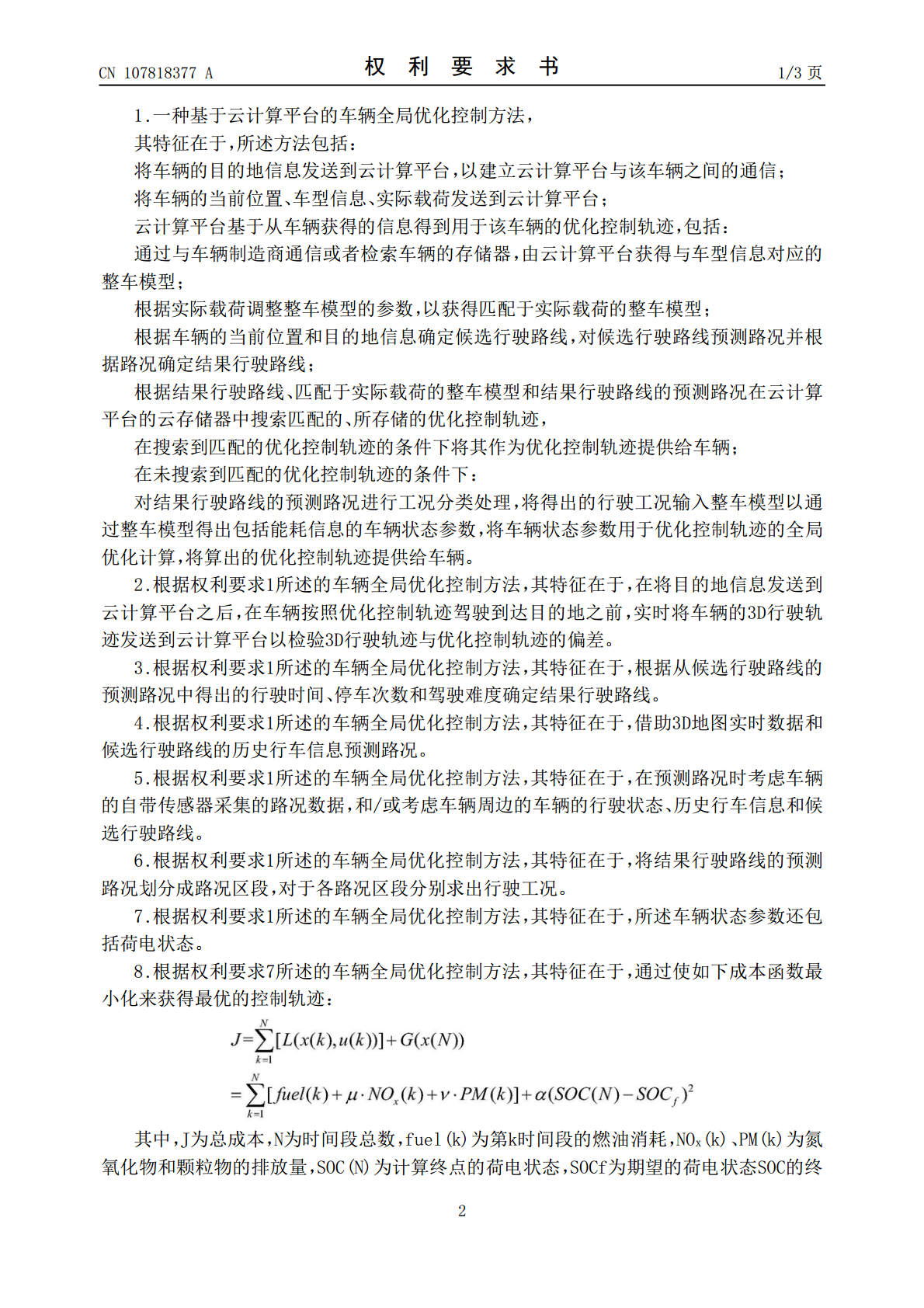
本发明涉及基于云计算平台的车辆全局优化控制方法、系统、车辆和云计算平台,尤其涉及一种提出基于云计算平台的车辆全局优化控制方法,所述方法包括:将车辆的目的地信息请求发送到云计算平台,以建立云计算平台与该车辆之间的通信;将车辆的当前位置、车型信息、实际载荷发送到云计算平台;云计算平台基于从车辆获得的信息得到用于该车辆的优化控制轨迹。
基于云平台的车辆风险监控系统、平台及方法.pdf
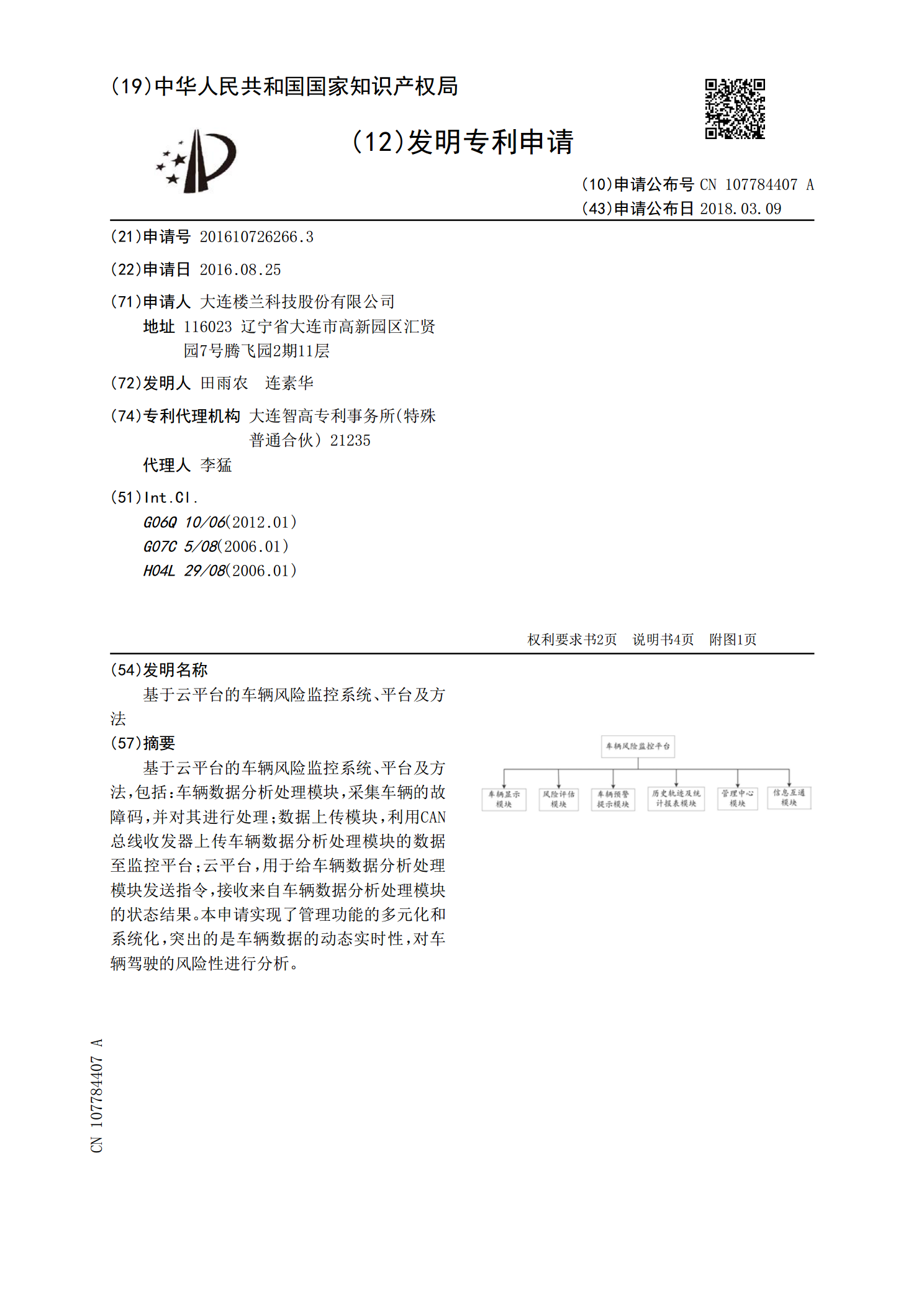
基于云平台的车辆风险监控系统、平台及方法,包括:车辆数据分析处理模块,采集车辆的故障码,并对其进行处理;数据上传模块,利用CAN总线收发器上传车辆数据分析处理模块的数据至监控平台;云平台,用于给车辆数据分析处理模块发送指令,接收来自车辆数据分析处理模块的状态结果。本申请实现了管理功能的多元化和系统化,突出的是车辆数据的动态实时性,对车辆驾驶的风险性进行分析。

基于云计算的物流车辆路径规划平台设计与实现.docx
基于云计算的物流车辆路径规划平台设计与实现基于云计算的物流车辆路径规划平台设计与实现摘要:物流车辆路径规划在提高物流效率、降低物流成本方面起到了至关重要的作用。随着云计算技术的发展,将物流车辆路径规划与云计算相结合,可以实现更加高效、灵活的路径规划。本文以基于云计算的物流车辆路径规划平台为研究对象,进行详细的设计与实现。关键词:云计算、物流、车辆路径规划、平台一、引言物流是指在经济活动中,对商品从生产地点到消费地点的流动进行组织和实施的过程。物流过程中的车辆路径规划是提高物流效率的关键环节。传统的物流车辆

云计算虚拟化平台的内存资源全局优化研究.docx
云计算虚拟化平台的内存资源全局优化研究随着云计算在各行各业的广泛应用和发展,越来越多的企业和机构开始选择使用云计算虚拟化平台来管理自己的IT资源,以便更好地满足快速变化的业务需求和节约IT投资。在云计算虚拟化平台中,内存资源是至关重要的一部分,对其进行全局优化是提高平台性能和资源利用率的重要手段。一、背景云计算虚拟化平台是一种在物理硬件基础上用虚拟化技术构建的云计算基础架构,以提供更高效、更灵活、更可靠的IT服务。应用程序或操作系统可以将虚拟化服务器的计算资源、存储资源和网络资源池化,以便根据应用程序和业

云计算虚拟化平台的内存资源全局优化研究.doc
云计算虚拟化平台的内存资源全局优化研究随着互联网的飞速发展,其信息服务的快速增长以及用户对信息服务的逐渐依赖的趋势已经势不可挡了。而互联网服务提供商一直以来,面临着以更低成本提供更好服务的挑战。因此拥有按使用付费和高性价比的云计算模式受到了越来越多企业以及用户的青睐。而借助虚拟化技术,云计算能将大规模计算资源统一管理,提高了资源利用效率,简化了管理和维护成本,并为用户提供易获取、易扩展的按需服务。然而虚拟化技术和云计算平台的结合带来了全新的使用模式和资源整合,基于虚拟化技术的资源按需分配与调度可以提高云平