
铸造加工件自动夹具及定位方法.pdf

沛芹****ng


1/7
2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

铸造加工件自动夹具及定位方法.pdf
本发明提供一种铸造加工件自动夹具及定位方法,其中,铸造加工件自动夹具包括:第一位置传感器、第二位置传感器、第一定位机构、第二定位机构以及夹紧机构;第一定位机构对铸造加工件进行X方向的定位,第二定位机构对铸造加工件进行同一平面内Y方向的定位,第一位置传感器设置于X方向的第一校准位置,其与第一定位机构信号传输,第二位置传感器设置于Y方向的第二校准位置,其与第二定位机构信号传输,夹紧机构对铸造加工件进行与平面相垂直的Z方向的夹紧,其与第一位置传感器和第二位置传感器信号传输。本发明的铸造加工件自动夹具可以配合铸造
工件定位夹具.pdf
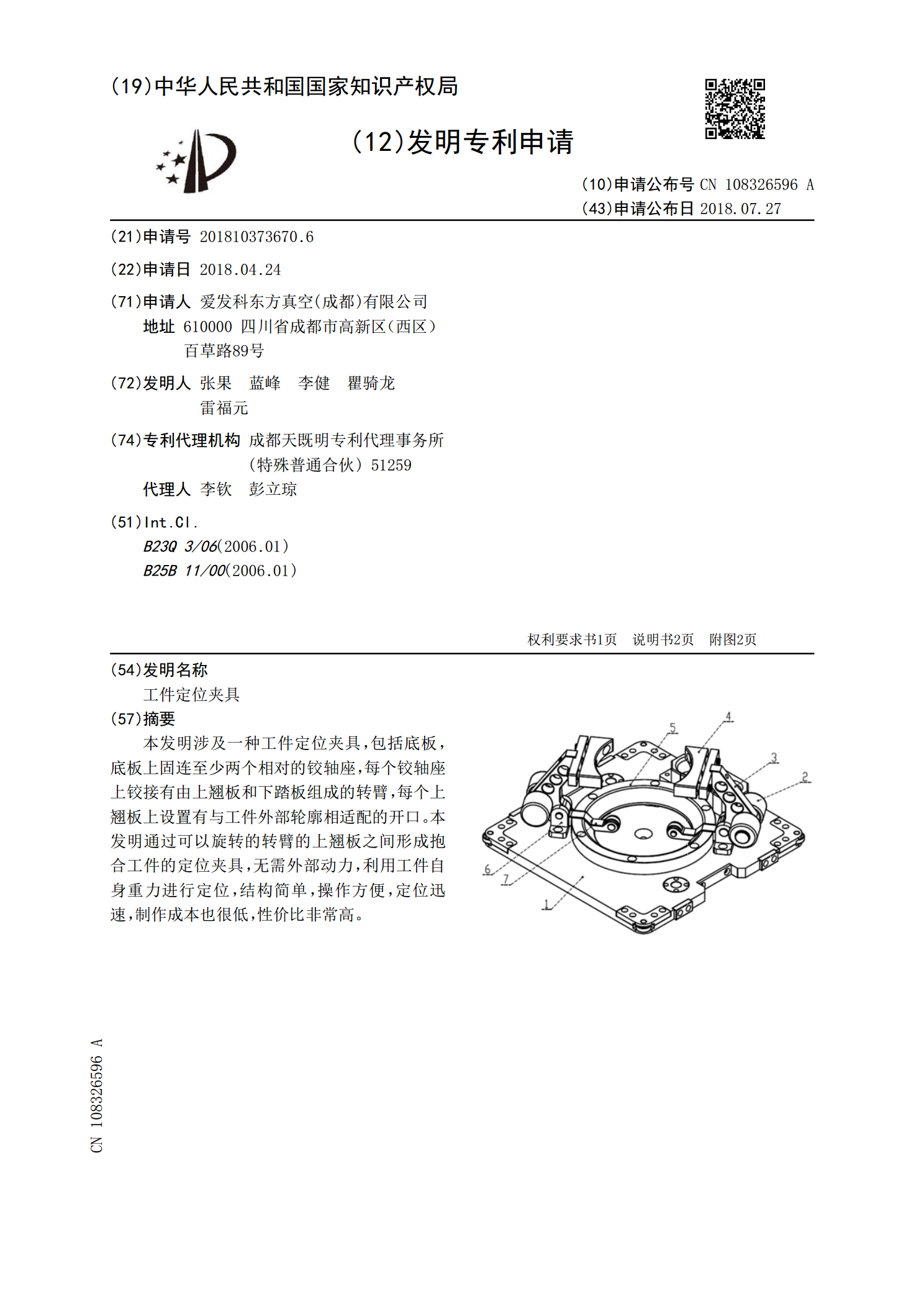
本发明涉及一种工件定位夹具,包括底板,底板上固连至少两个相对的铰轴座,每个铰轴座上铰接有由上翘板和下踏板组成的转臂,每个上翘板上设置有与工件外部轮廓相适配的开口。本发明通过可以旋转的转臂的上翘板之间形成抱合工件的定位夹具,无需外部动力,利用工件自身重力进行定位,结构简单,操作方便,定位迅速,制作成本也很低,性价比非常高。

工件在夹具中的定位.ppt
平面定位常用定位元件可调支承:支承工件的粗基准面,限制一个自由度。自位支承:是活动的或是浮动的,只起一个支承点的作用,只限制一个自由度。辅助支承:不作定位元件,不限制自由度,只用以增加工件在加工过程中的刚性。用定位销定位时,短圆柱销限制两个自由度;长圆柱销可以限制四个自由度;端圆锥销限制三个自由度。2.心轴几种常用的心轴结构形式如下图:过盈配合心轴,限制工件四个自由度;间隙配合心轴,限制工件五个自由度(心轴外圆部分限制四个自由度,轴肩面限制一个自由度);小锥锥度心轴,装夹工件时,通过工件孔和心轴接触表面的

工件在夹具中的定位.ppt
平面定位常用定位元件可调支承:支承工件的粗基准面,限制一个自由度。自位支承:是活动的或是浮动的,只起一个支承点的作用,只限制一个自由度。辅助支承:不作定位元件,不限制自由度,只用以增加工件在加工过程中的刚性。用定位销定位时,短圆柱销限制两个自由度;长圆柱销可以限制四个自由度;端圆锥销限制三个自由度。2.心轴几种常用的心轴结构形式如下图:过盈配合心轴,限制工件四个自由度;间隙配合心轴,限制工件五个自由度(心轴外圆部分限制四个自由度,轴肩面限制一个自由度);小锥锥度心轴,装夹工件时,通过工件孔和心轴接触表面的

工件在夹具中的定位1.pptx
第四章机床夹具原理与设计第二节工件在夹具中的定位第二节工件在夹具中的定位第二节工件在夹具中的定位第二节工件在夹具中的定位第二节工件在夹具中的定位第二节工件在夹具中的定位第二节工件在夹具中的定位常见典型定位方式及定位元件所限制的自由度常见典型定位方式及定位元件所限制的自由度常见典型定位方式及定位元件所限制的自由度常见典型定位方式及定位元件所限制的自由度常见典型定位方式及定位元件所限制的自由度第二节工件在夹具中的定位第二节工件在夹具中的定位第二节工件在夹具中的定位第二节工件在夹具中的定位第二节工件在夹具中的定