
照明控制方法及智能照明系统.pdf

是你****平呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

照明控制方法及智能照明系统.pdf
本发明实施例提供一种照明控制方法及智能照明系统,属于智能照明领域。所述系统包括测速模块、图像采集模块、控制模块、照明模块和修正模块,该方法通过图像采集模块采集车辆在预设时间内行驶的图像信息,控制模块根据获取的所述图像信息获得所述车辆的第二当前行驶速度,测速模块检测车辆的第一当前行驶速度,所述修正模块根据获得的车辆速度修正参数对所述第一当前行驶速度和第二当前行驶速度进行修正,以获得第一修正行驶速度和第二修正行驶速度,所述控制模块根据所述第二当前行驶速度或所述第一当前行驶速度控制所述照明模块的照明亮度,从而控
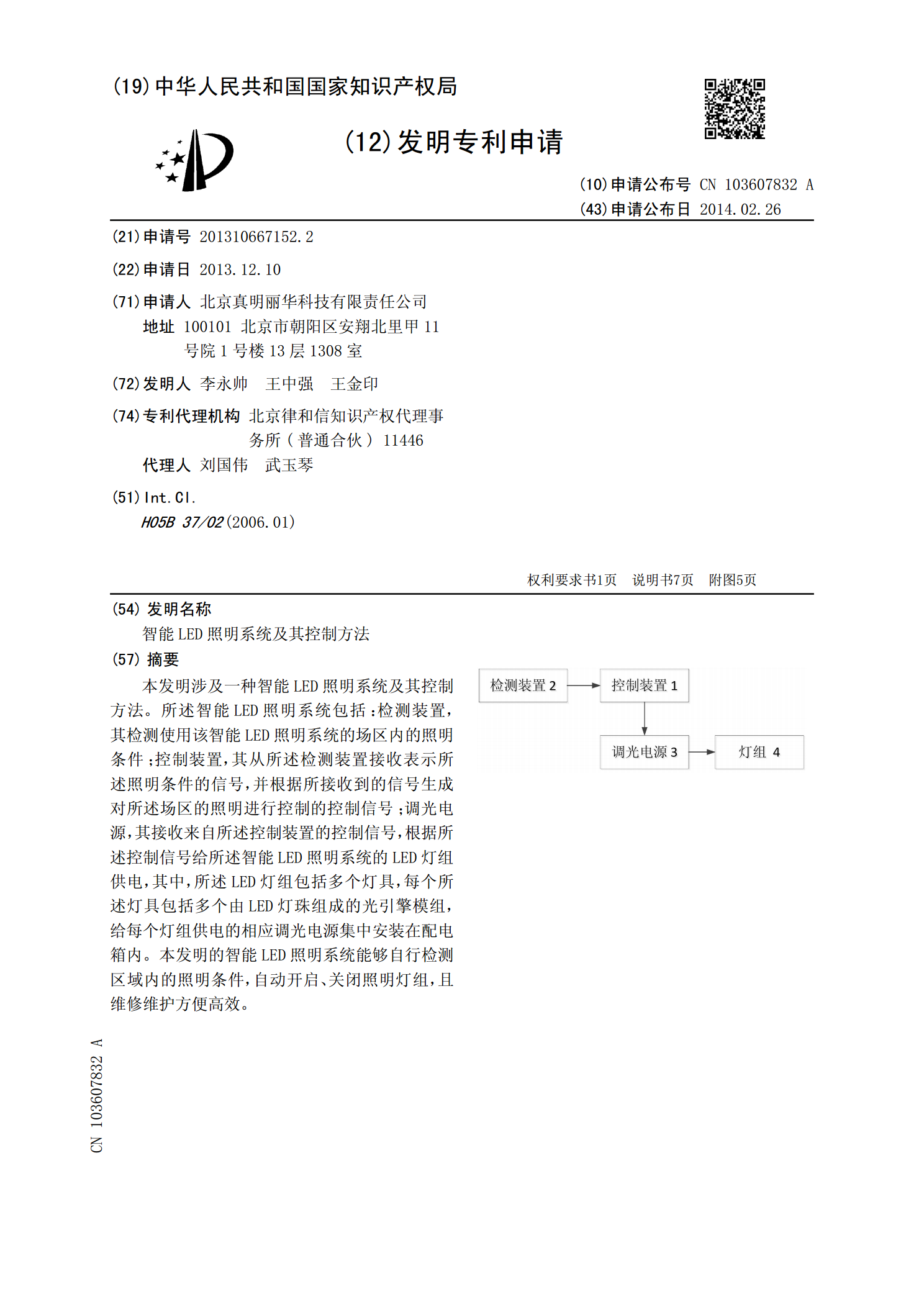
智能LED照明系统及其控制方法.pdf
本发明涉及一种智能LED照明系统及其控制方法。所述智能LED照明系统包括:检测装置,其检测使用该智能LED照明系统的场区内的照明条件;控制装置,其从所述检测装置接收表示所述照明条件的信号,并根据所接收到的信号生成对所述场区的照明进行控制的控制信号;调光电源,其接收来自所述控制装置的控制信号,根据所述控制信号给所述智能LED照明系统的LED灯组供电,其中,所述LED灯组包括多个灯具,每个所述灯具包括多个由LED灯珠组成的光引擎模组,给每个灯组供电的相应调光电源集中安装在配电箱内。本发明的智能LED照明系统能
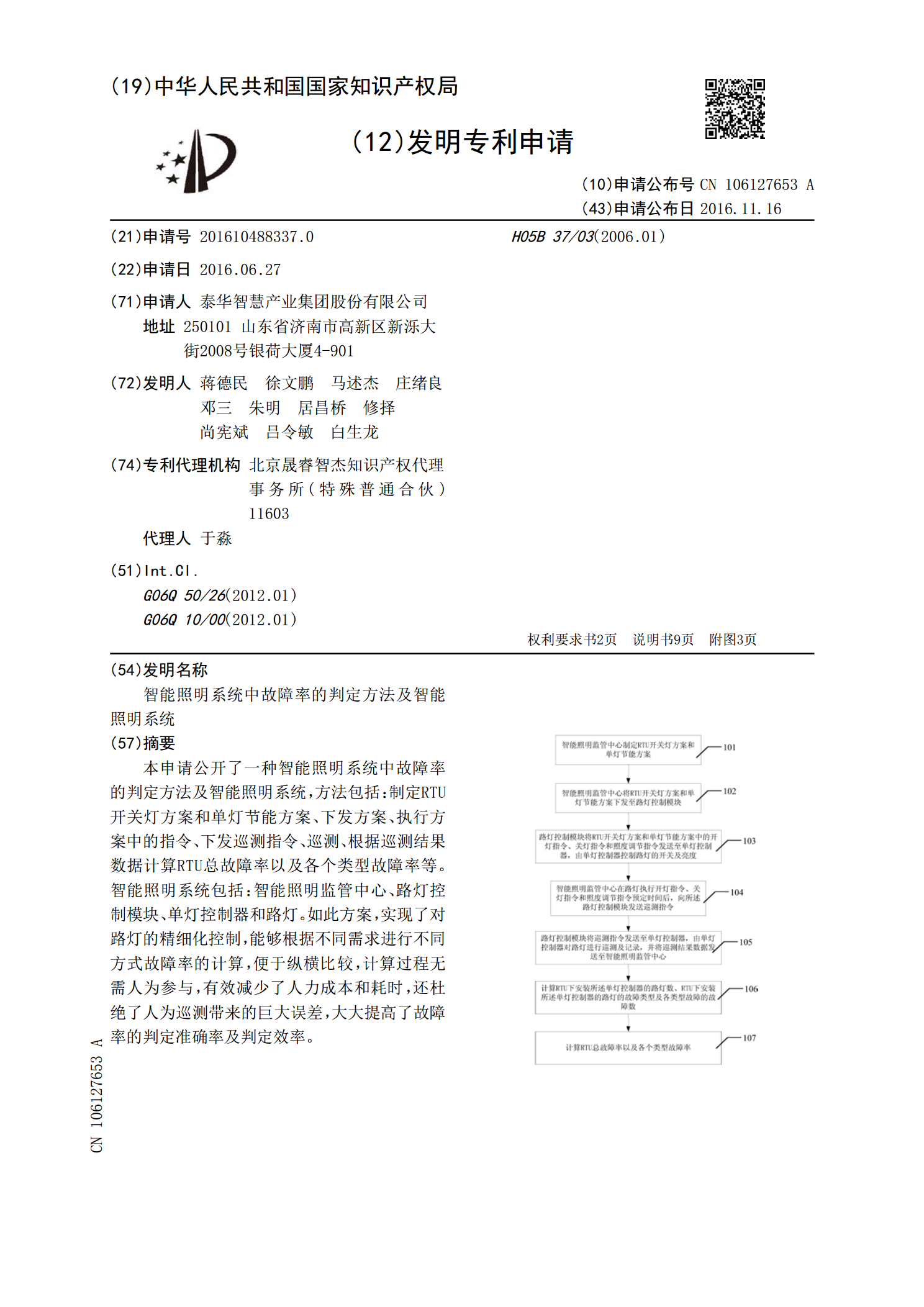
智能照明系统中故障率的判定方法及智能照明系统.pdf
本申请公开了一种智能照明系统中故障率的判定方法及智能照明系统,方法包括:制定RTU开关灯方案和单灯节能方案、下发方案、执行方案中的指令、下发巡测指令、巡测、根据巡测结果数据计算RTU总故障率以及各个类型故障率等。智能照明系统包括:智能照明监管中心、路灯控制模块、单灯控制器和路灯。如此方案,实现了对路灯的精细化控制,能够根据不同需求进行不同方式故障率的计算,便于纵横比较,计算过程无需人为参与,有效减少了人力成本和耗时,还杜绝了人为巡测带来的巨大误差,大大提高了故障率的判定准确率及判定效率。
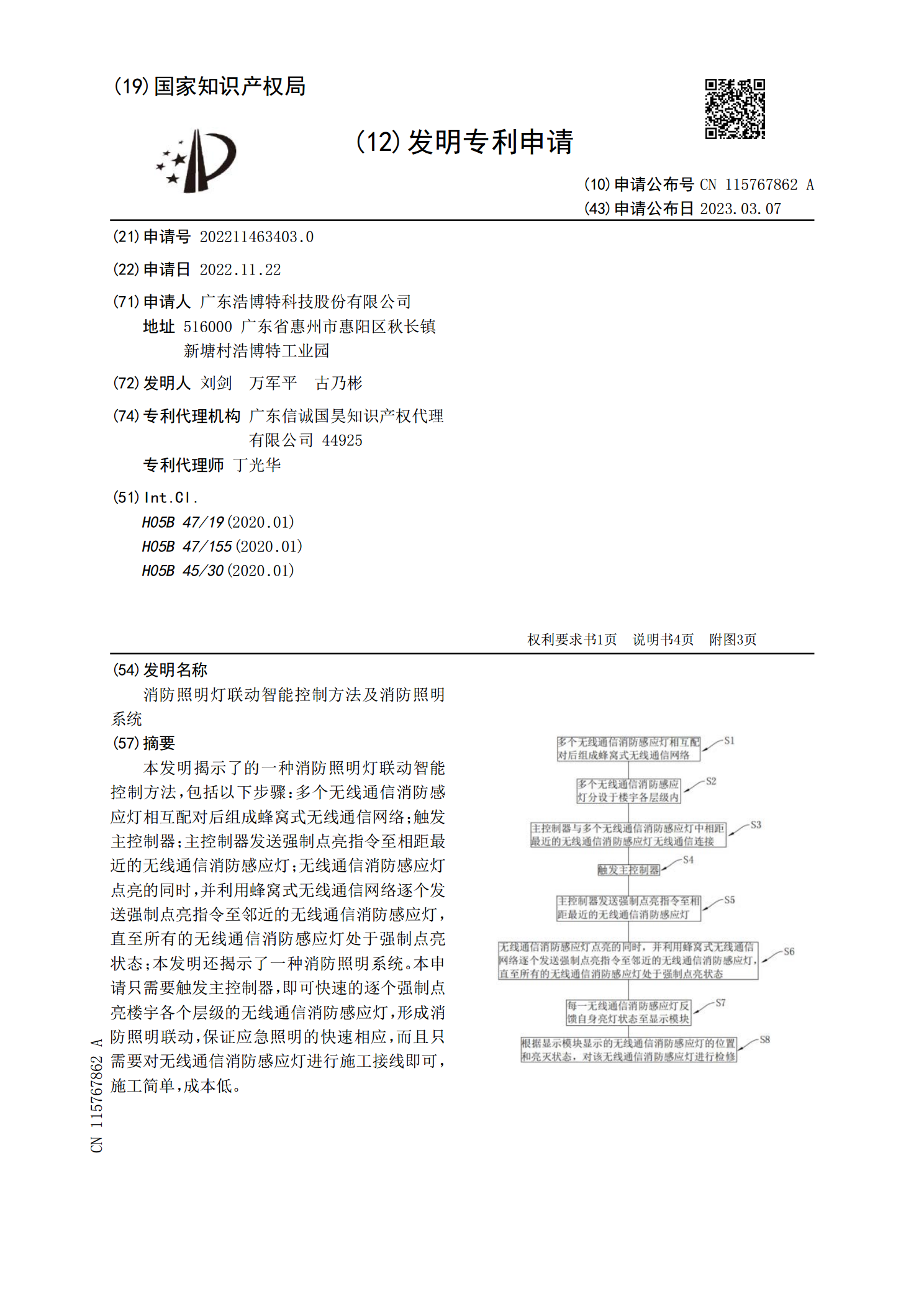
消防照明灯联动智能控制方法及消防照明系统.pdf
本发明揭示了的一种消防照明灯联动智能控制方法,包括以下步骤:多个无线通信消防感应灯相互配对后组成蜂窝式无线通信网络;触发主控制器;主控制器发送强制点亮指令至相距最近的无线通信消防感应灯;无线通信消防感应灯点亮的同时,并利用蜂窝式无线通信网络逐个发送强制点亮指令至邻近的无线通信消防感应灯,直至所有的无线通信消防感应灯处于强制点亮状态;本发明还揭示了一种消防照明系统。本申请只需要触发主控制器,即可快速的逐个强制点亮楼宇各个层级的无线通信消防感应灯,形成消防照明联动,保证应急照明的快速相应,而且只需要对无线通信

智能照明控制系统.ppt
照明控制的发展历史为什么要发明照明控制系统案例分析——机场大楼使用智能照明系统后为什么要发明照明控制系统外立面泛光照明电梯厅和公共照明车库照明好的灯光设计可以营造出一种温馨、舒适的环境,增添其艺术的魅力。为什么要发明照明控制系统智能照明可与其他系统联动控制,例如BA系统,监控报警系统、车库刷卡系统。当发生紧急情况后可由报警系统强制打开所有回路。系统方案设计外立面泛光照明案例——广州珠江帝景酒店酒店大厅照明效果欣赏酒店式公寓标准照明时序宴会厅照明效果欣赏宴会厅照明效果欣赏大型宴会厅照明效果欣赏酒店多功能厅照