
一种基于安卓系统的智能手表实体指针的确位方法.pdf

是你****平呀

1/8

2/8

3/8
4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于安卓系统的智能手表实体指针的确位方法.pdf
本发明涉及一种基于安卓系统的智能手表实体指针的确位方法,步骤一,对具有安装系统的包括处理器的手机的摄像头进行设置,使得所述摄像头每时间阈值内至少对焦一次。步骤二,所述摄像头对所述手表的表面进行实时拍摄得到视频,所述手机对所述摄像头拍摄的视频进行识别,所述识别为提取所述视频的图像进行识别。步骤三,对提取的所述视频的图像进行定位预处理,所述定位预处理包括将图像进行灰度化,使其由4通道图像生成1通道的灰度图像,对所述灰度图像进行高斯滤波处理,得到平滑灰度图像。在多次的评估对处理器的要求的计算的速度时,发现光线、
一种确定智能手表表面实体指针位置的系统.pdf
本发明涉及一种确定智能手表表面实体指针位置的系统,所述系统包括具有安卓系统的智能手机和智能手表;所述智能手表包括MCU和表面,所述表面为圆形表面,在圆形表面的12点位置设置有红色圆点;所述智能手机包括处理器和摄像头;所述摄像头可对所述手表的表面进行实时拍摄得到视频;所述摄像头可在每时间阈值内至少对焦一次;所述处理器包括图像处理单元,所述图像处理单元可对所述视频进行识别,所述识别为提取所述视频的图像进行图像处理;所述图像处理包括定位预处理,所述定位预处理包括将图像进行灰度化,使其由4通道图像生成1通道的灰度

一种智能手表指针的调节系统及方法.pdf
本发明涉及一种智能手表指针的调节系统及方法,所述系统包括:表冠,所述表冠包括表冠头和轴杆;所述表冠头用于用户按动以使所述表冠延Y方向上移动;所述轴杆固连在所述表冠头上,当所述表冠头转动时,所述轴杆延其中心轴旋转;光学跟踪表面传感器,所述光学跟踪表面传感器设置于偏移所述轴杆一段距离,用于跟踪所述轴杆的运动;处理器,所述处理器可以对光学跟踪表面传感器检测的运动进行计算。

一种基于智能手表的使用方法、系统及其智能手表.pdf
本发明公开了一种基于智能手表的使用方法、系统及其智能手表,其方法是通过语音接收器接收语音信息,并将其发送至语音存储器中进行存储,当语音检测器检测到特定频率的声音时,将控制信号发送至语音播放器,语音播放器接收到控制信号后,从语音存储器中选择语音信息进行播放。通过本发明可以将用户事先录制的音乐或录音存储至智能手表中,将其佩戴于婴幼儿手上,当婴幼儿在睡眠中哭泣时,智能手表中的语音检测器检测到其哭声的频率时会自动开启安抚功能,即自动播放用户事先录制的录音或摇篮曲等音乐,给用户带来极大的便利。
一种基于电容的手表指针调节方法.pdf
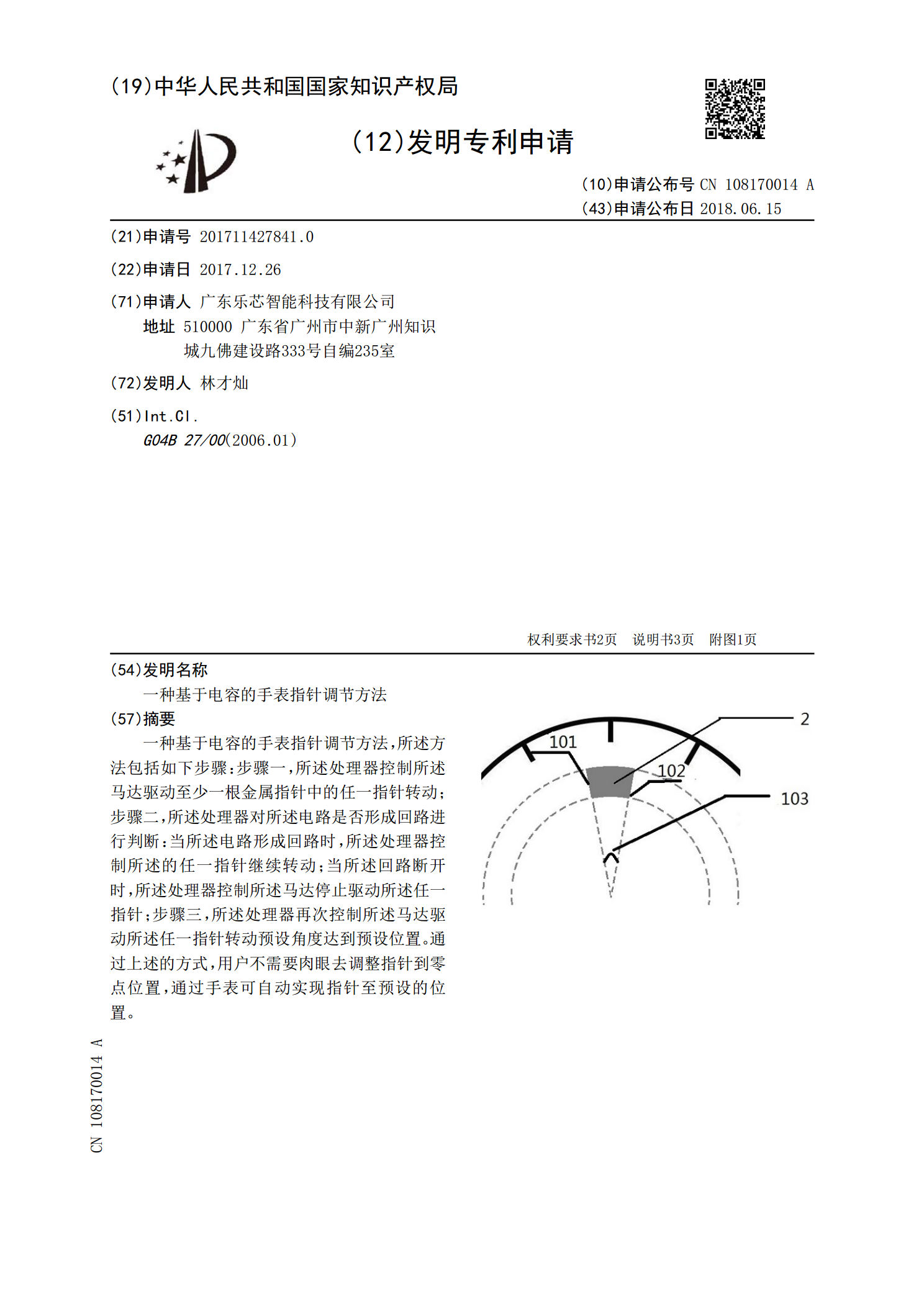
一种基于电容的手表指针调节方法,所述方法包括如下步骤:步骤一,所述处理器控制所述马达驱动至少一根金属指针中的任一指针转动;步骤二,所述处理器对所述电路是否形成回路进行判断:当所述电路形成回路时,所述处理器控制所述的任一指针继续转动;当所述回路断开时,所述处理器控制所述马达停止驱动所述任一指针;步骤三,所述处理器再次控制所述马达驱动所述任一指针转动预设角度达到预设位置。通过上述的方式,用户不需要肉眼去调整指针到零点位置,通过手表可自动实现指针至预设的位置。