
提高枪支离位报警系统中UWB测距精度的方法.pdf

玉怡****文档


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

提高枪支离位报警系统中UWB测距精度的方法.pdf
公开了一种提高枪支离位报警系统中UWB测距精度的方法,包括:由安装于枪支内的信标的UWB模块在第一时刻向岗亭基站发出测距请求脉冲信号,岗亭基站UWB模块在第二时刻接收到请求脉冲信号,并在第三时刻向信标发出响应信号,信标的UWB模块在第四时刻接收到所述响应信号,并在第五时刻发出结束信号,岗亭基站UWB模块在第六时刻接收到结束信号;基于第一时刻、第二时刻、第三时刻、第四时刻、第五时刻和第六时刻计算出脉冲信号在信标和岗亭基站两者之间的双向飞行时间,从而确定UWB测距信息,其中,UWB测距信息是信标到岗亭基站的距
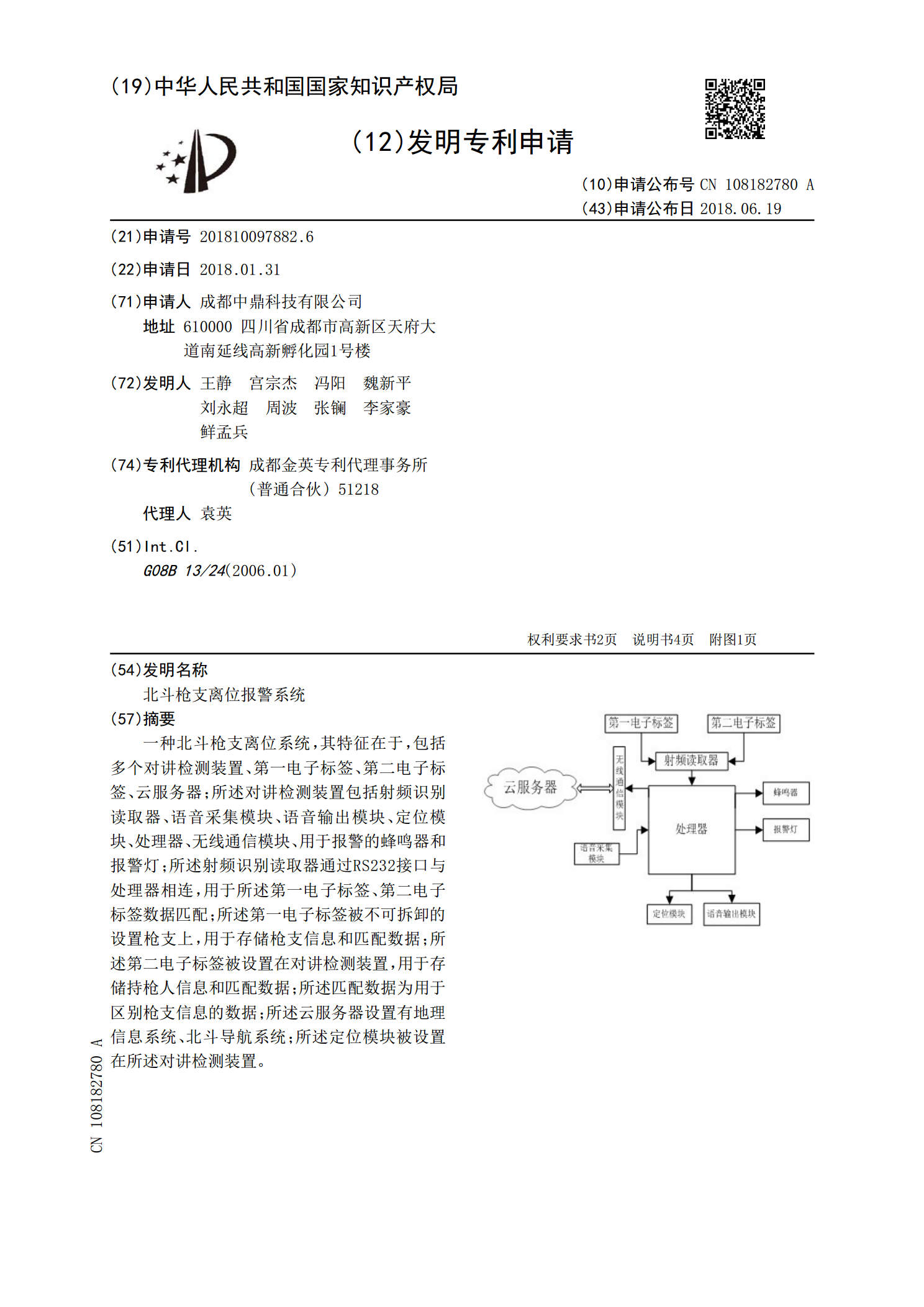
北斗枪支离位报警系统.pdf
一种北斗枪支离位系统,其特征在于,包括多个对讲检测装置、第一电子标签、第二电子标签、云服务器;所述对讲检测装置包括射频识别读取器、语音采集模块、语音输出模块、定位模块、处理器、无线通信模块、用于报警的蜂鸣器和报警灯;所述射频识别读取器通过RS232接口与处理器相连,用于所述第一电子标签、第二电子标签数据匹配;所述第一电子标签被不可拆卸的设置枪支上,用于存储枪支信息和匹配数据;所述第二电子标签被设置在对讲检测装置,用于存储持枪人信息和匹配数据;所述匹配数据为用于区别枪支信息的数据;所述云服务器设置有地理信息
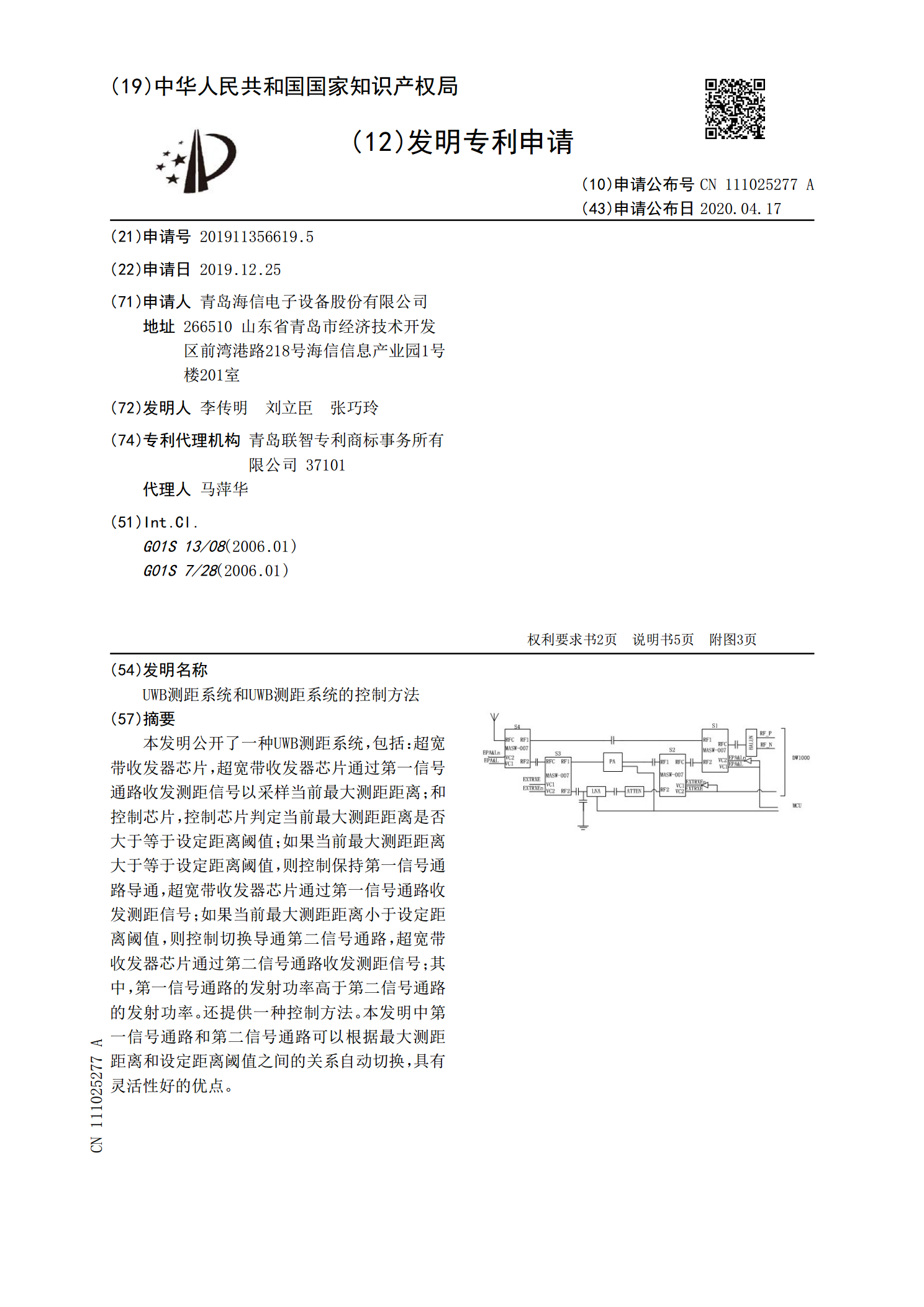
UWB测距系统和UWB测距系统的控制方法.pdf
本发明公开了一种UWB测距系统,包括:超宽带收发器芯片,超宽带收发器芯片通过第一信号通路收发测距信号以采样当前最大测距距离;和控制芯片,控制芯片判定当前最大测距距离是否大于等于设定距离阈值;如果当前最大测距距离大于等于设定距离阈值,则控制保持第一信号通路导通,超宽带收发器芯片通过第一信号通路收发测距信号;如果当前最大测距距离小于设定距离阈值,则控制切换导通第二信号通路,超宽带收发器芯片通过第二信号通路收发测距信号;其中,第一信号通路的发射功率高于第二信号通路的发射功率。还提供一种控制方法。本发明中第一信号
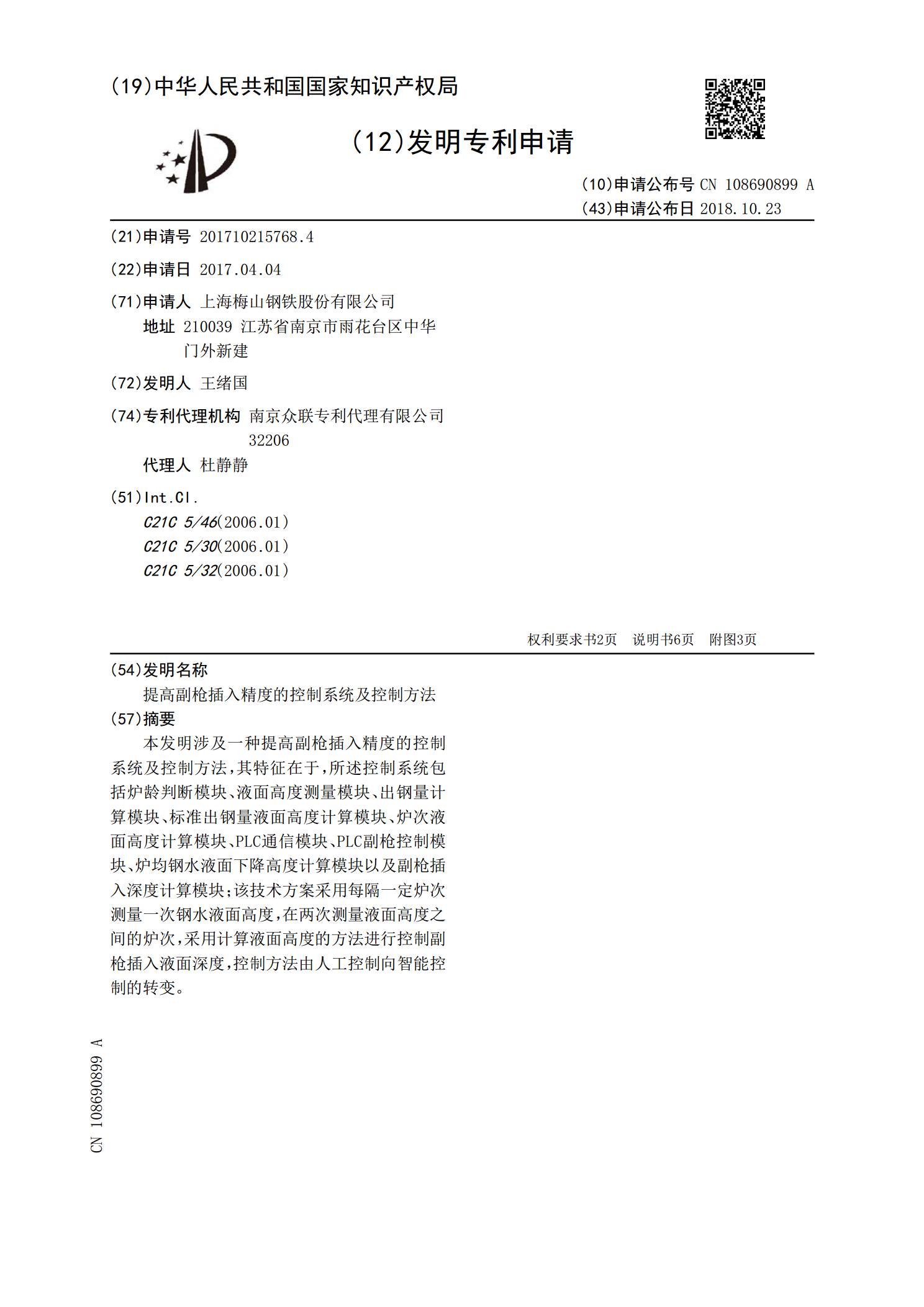
提高副枪插入精度的控制系统及控制方法.pdf
本发明涉及一种提高副枪插入精度的控制系统及控制方法,其特征在于,所述控制系统包括炉龄判断模块、液面高度测量模块、出钢量计算模块、标准出钢量液面高度计算模块、炉次液面高度计算模块、PLC通信模块、PLC副枪控制模块、炉均钢水液面下降高度计算模块以及副枪插入深度计算模块;该技术方案采用每隔一定炉次测量一次钢水液面高度,在两次测量液面高度之间的炉次,采用计算液面高度的方法进行控制副枪插入液面深度,控制方法由人工控制向智能控制的转变。

提高激光脉冲测距精度的方法.docx
提高激光脉冲测距精度的方法论文题目:提高激光脉冲测距精度的方法摘要:激光脉冲测距技术在许多领域中得到广泛应用,但其精度受到多种因素的影响,如光学系统的非线性误差、光电探测器的噪声、环境干扰等。本文主要研究了激光脉冲测距技术中存在的几个主要影响因素,并提出了一些提高测距精度的方法,包括光学系统的校正方法、噪声抑制技术以及环境干扰的消除措施。实验结果表明,这些方法能够有效提高激光脉冲测距的精度。关键词:激光脉冲测距;精度;光学系统;噪声;环境干扰引言:激光脉冲测距技术是一种常用的非接触式测量方法,其具有高精度