
移动机器人所处状态识别方法以及装置.pdf

书生****aa


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

移动机器人所处状态识别方法以及装置.pdf
本申请涉及一种移动机器人所处状态识别方法、装置、计算机设备和存储介质。方法包括:获取移动机器人的第一预设位置相对当前地面的第一离地距离与第二离地距离;获取各时刻对应的第一离地距离与第二离地距离的离地距离差;当离地距离差大于预设状态变更判定距离阈值时,计时离地距离差大于预设状态变更判定距离阈值的持续时间;当持续时间超过预设状态变更判定时间阈值时,判定移动机器人处于倾斜被困状态。本申请通过获取移动机器人不同预设位置的离地距离,通过离地距离之差来识别判定移动机器人是否处于倾斜被困状态,通过本申请,可以实现对移动

唱歌状态识别方法及装置.pdf
本申请公开了一种唱歌状态识别方法及装置,属于视频直播领域。该方法包括接收主播客户端发送的视频流,每隔预设切片时长切分视频流,获取预设切片时长的视频片段;获取目标数量个视频片段,将在目标数量个视频片段之后获取到的每个视频片段,与在视频片段之前获取到的目标数量个视频片段合成,得到一个目标视频文件;提取目标视频文件的综合特征;采用分类器对综合特征进行处理并输出处理结果,该处理结果用于指示主播用户的唱歌状态。本申请服务器可以基于分类器确定主播用户是否处于唱歌状态,提高了对主播用户的唱歌状态确定的可靠性以及准确度。
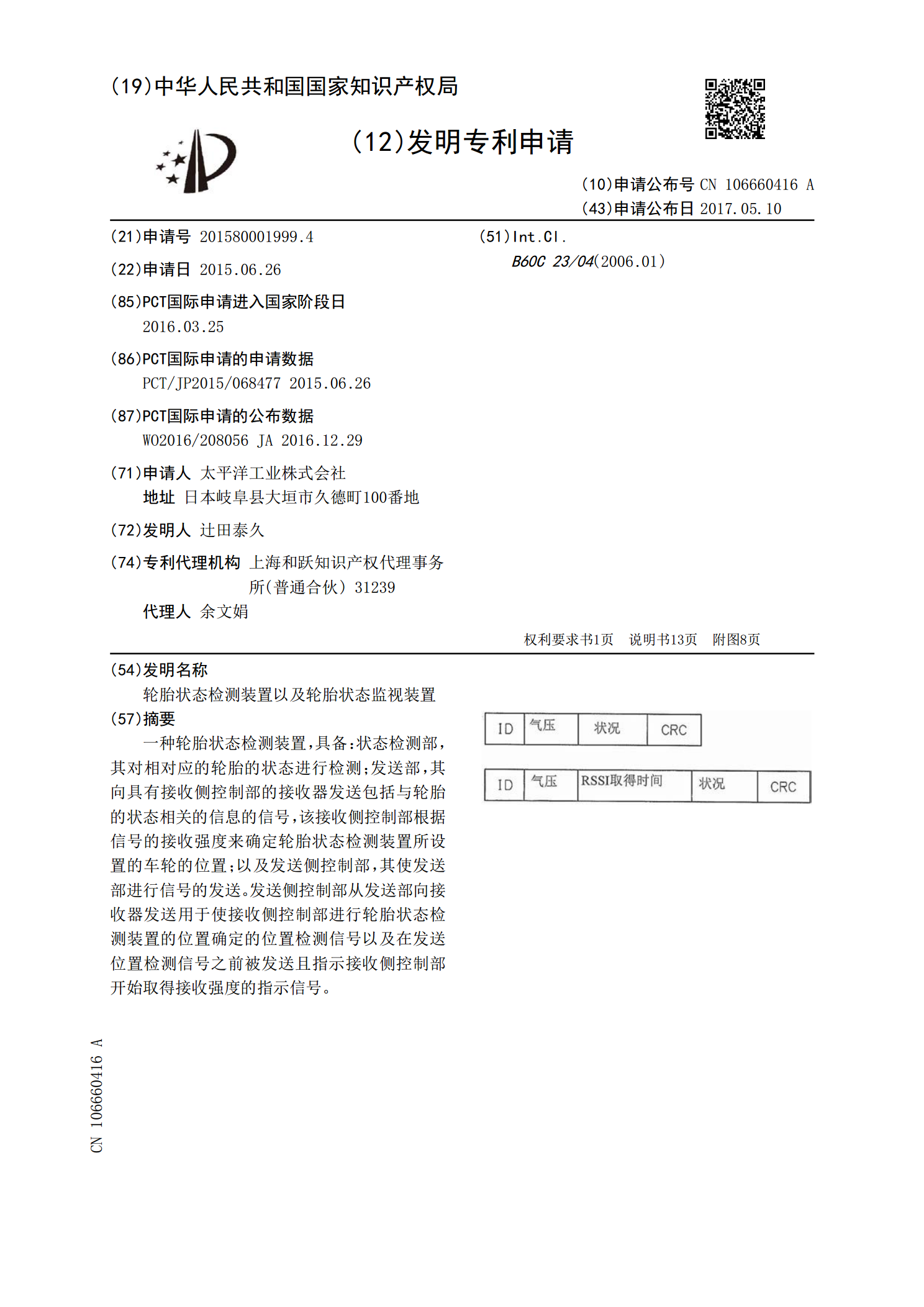
轮胎状态检测装置以及轮胎状态监视装置.pdf
一种轮胎状态检测装置,具备:状态检测部,其对相对应的轮胎的状态进行检测;发送部,其向具有接收侧控制部的接收器发送包括与轮胎的状态相关的信息的信号,该接收侧控制部根据信号的接收强度来确定轮胎状态检测装置所设置的车轮的位置;以及发送侧控制部,其使发送部进行信号的发送。发送侧控制部从发送部向接收器发送用于使接收侧控制部进行轮胎状态检测装置的位置确定的位置检测信号以及在发送位置检测信号之前被发送且指示接收侧控制部开始取得接收强度的指示信号。

身份识别方法以及装置.pdf
本说明书实施例提供身份识别方法以及装置,其中所述身份识别方法包括:对获取的待处理图像中包含的待识别对象进行关键点检测,根据关键点检测结果确定所述待识别对象对应的特征检测区域,提取所述特征检测区域的图像特征,并利用所述图像特征对所述待识别对象进行行人重识别,生成所述待识别对象对应的身份识别结果。
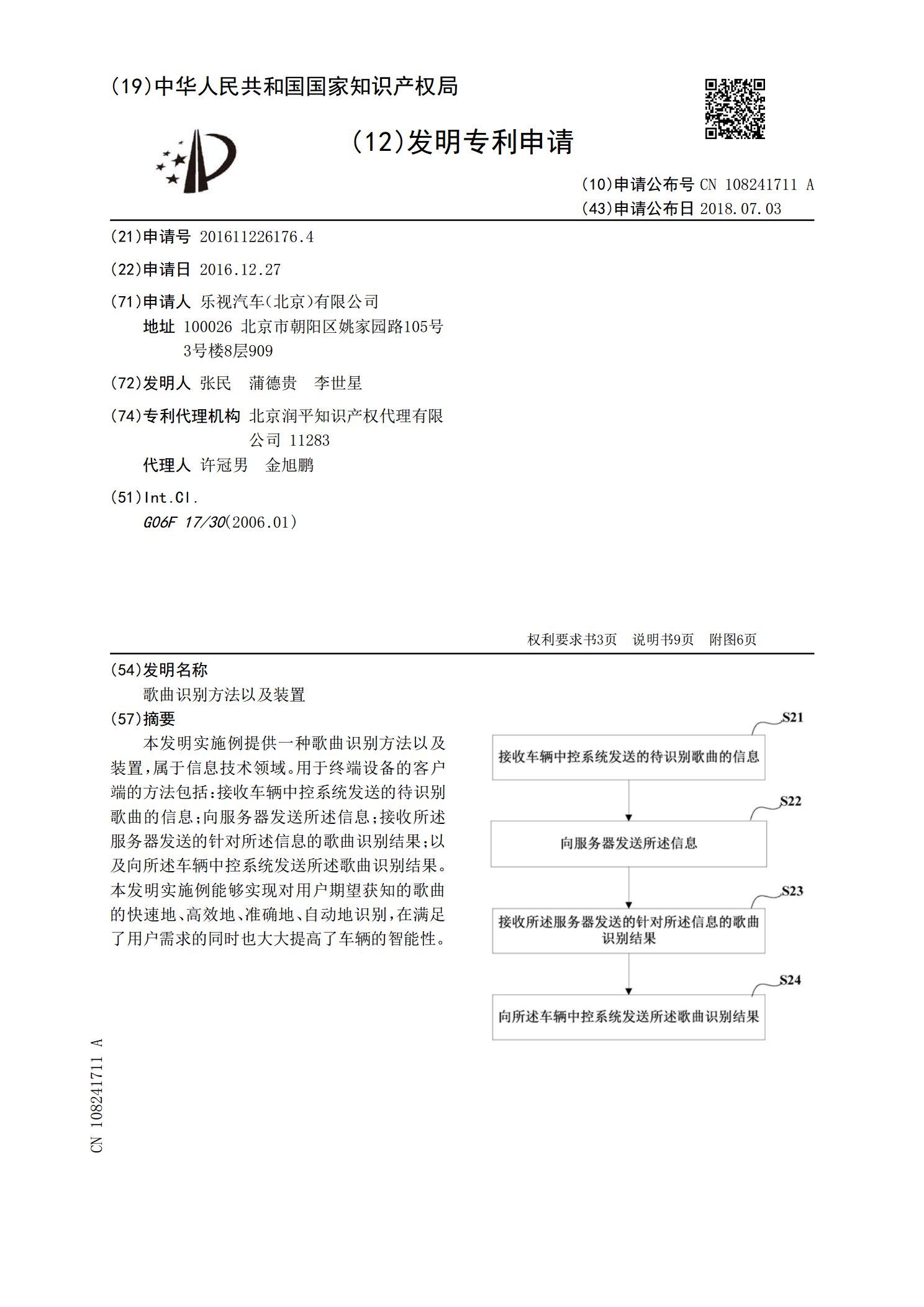
歌曲识别方法以及装置.pdf
本发明实施例提供一种歌曲识别方法以及装置,属于信息技术领域。用于终端设备的客户端的方法包括:接收车辆中控系统发送的待识别歌曲的信息;向服务器发送所述信息;接收所述服务器发送的针对所述信息的歌曲识别结果;以及向所述车辆中控系统发送所述歌曲识别结果。本发明实施例能够实现对用户期望获知的歌曲的快速地、高效地、准确地、自动地识别,在满足了用户需求的同时也大大提高了车辆的智能性。