
一种基于外骨骼数据手套和遥操纵杆的遥操作系统与方法.pdf

Ro****44


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于外骨骼数据手套和遥操纵杆的遥操作系统与方法.pdf
本发明提供了一种基于外骨骼数据手套和遥操纵杆的力反馈遥操作系统与方法,包括外骨骼手数据手套、遥操纵杆、远端机器臂和处理控制单元。所述外骨骼手数据手套和遥操作杆分别用于用户手指关节角度和手部位置的跟踪,同时用于实现手指部位和整条手臂上可感知的力反馈,所述处理控制单元包括传感器电路和上位机系统,上位机对采集到的用户动作信息进行分析处理,并将控制信号发送给远端机器臂控制器,完成相应的操作;此外,位于机械手上的力传感器可将机械手末端压力实时传送给上位机系统,再通过外骨骼数据手套和遥操纵杆反馈给佩戴者,以实现更全面

一种基于外骨骼数据手套和肌电手环的遥操作系统与方法.pdf
本发明提供了一种基于外骨骼数据手套和肌电手环的力反馈遥操作系统与方法,该系统包括近端可穿戴设备、远端机器臂单元和处理控制单元。所述的近端可穿戴设备包括外骨骼数据手套和肌电手环,可同时获取手指、手腕、小臂和大臂的动作信息,所述处理控制单元包括传感器电路和上位机系统,上位机对采集到的用户动作信息进行分析处理,并将控制信号发送给远端机器臂控制器,完成相应的操作;此外,位于机械手上的力传感器可将机械手末端压力实时传送给上位机系统,再通过外骨骼数据手套微控制器控制驱动电机,带动驱动缆绳和指尖内部压片,以实现比较真实

一种面向遥操作的新型数据手套研制.pdf
第��卷第�期机器人∂��������������年�月ΡΟΒΟΤ��������文章编号�����2������������2����2��一种面向遥操作的新型数据手套研制α王家顺王田苗魏军韩壮志游松�北京航空航天大学机器人研究所�������摘要�本文主要介绍了自制的���2�型数据手套的设计!原理和实验�给出了该数据手套的性能!优缺点和实验数据�并借助图形仿真模型验证了利用数据手套在虚拟环境下进行人机交互的可行性�最后通过数据手套对灵巧手控制实验说明了其在遥操作领域应用的有效性�关键词�数据手套�遥
一种用于遥操作系统的性能评价方法及其应用.pdf
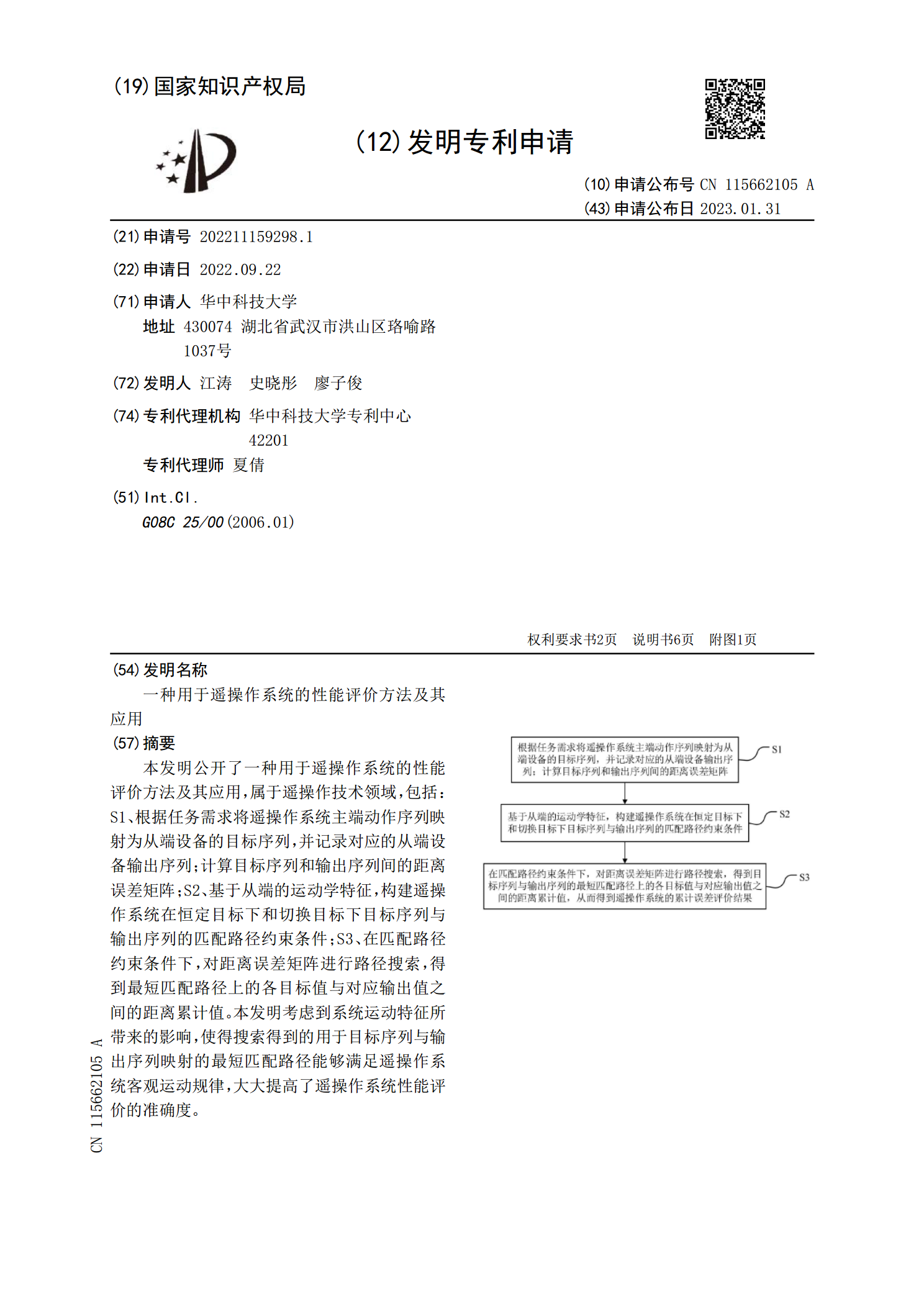
本发明公开了一种用于遥操作系统的性能评价方法及其应用,属于遥操作技术领域,包括:S1、根据任务需求将遥操作系统主端动作序列映射为从端设备的目标序列,并记录对应的从端设备输出序列;计算目标序列和输出序列间的距离误差矩阵;S2、基于从端的运动学特征,构建遥操作系统在恒定目标下和切换目标下目标序列与输出序列的匹配路径约束条件;S3、在匹配路径约束条件下,对距离误差矩阵进行路径搜索,得到最短匹配路径上的各目标值与对应输出值之间的距离累计值。本发明考虑到系统运动特征所带来的影响,使得搜索得到的用于目标序列与输出序列
外骨骼遥操作主手的设计研究.pptx
汇报人:/目录0102背景介绍研究意义研究目的03外骨骼遥操作主手定义外骨骼遥操作主手应用领域外骨骼遥操作主手研究现状04设计理念与原则结构设计控制系统设计性能评估与优化05实验设置与实验方法实验结果与分析结果对比与讨论06研究结论研究不足与展望汇报人: