
一种基于六轴传感器的跑步姿态检测方法.pdf

是你****岺呀


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于六轴传感器的跑步姿态检测方法.pdf
本发明公开了一种基于六轴传感器的跑步姿态检测方法,其包括:S1:利用六轴传感器获取用户跑步方向上的x轴加速度数据、z轴加速度数据和y轴陀螺仪数据;S2:对三个轴的数据的波峰和波谷进行检测,得到步态周期;S3:计算每一步态周期内的x轴加速度数据、z轴加速度数据和y轴陀螺仪数据的均值、方差、最大值和最小值特征值,组成特征向量;S4:将特征向量进行归一化处理得到标准化向量;S5:将标准化向量输入预先训练好的Softmax分类器,分别得到对应前掌着地方式、全掌着地方式和后掌着地方式三种类别的类别值;S6:选择最大
一种基于EKF的九轴运动传感器的姿态检测方法.pdf
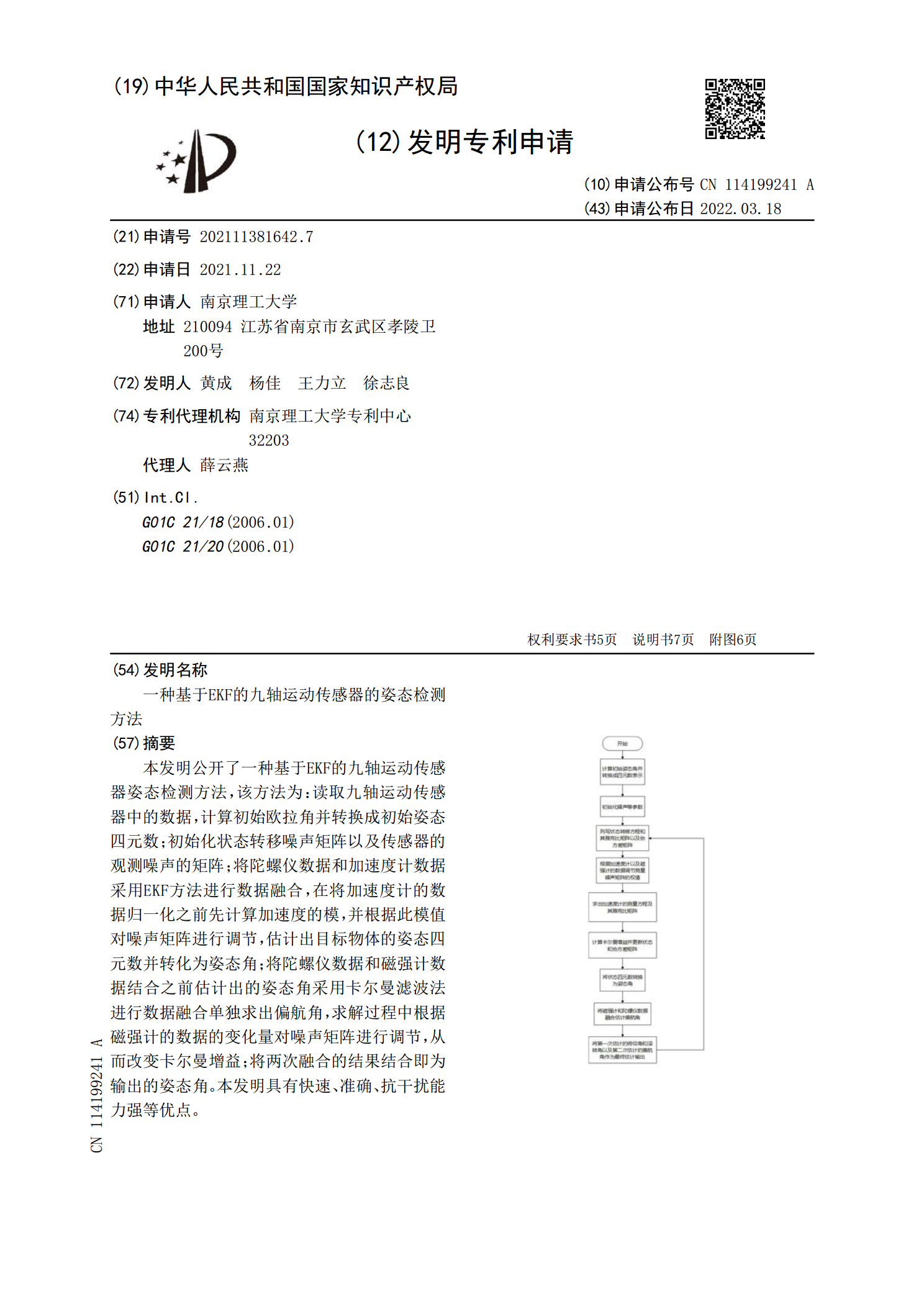
本发明公开了一种基于EKF的九轴运动传感器姿态检测方法,该方法为:读取九轴运动传感器中的数据,计算初始欧拉角并转换成初始姿态四元数;初始化状态转移噪声矩阵以及传感器的观测噪声的矩阵;将陀螺仪数据和加速度计数据采用EKF方法进行数据融合,在将加速度计的数据归一化之前先计算加速度的模,并根据此模值对噪声矩阵进行调节,估计出目标物体的姿态四元数并转化为姿态角;将陀螺仪数据和磁强计数据结合之前估计出的姿态角采用卡尔曼滤波法进行数据融合单独求出偏航角,求解过程中根据磁强计的数据的变化量对噪声矩阵进行调节,从而改变卡

一种基于三轴传感器的跑步距离校正方法.pdf
本发明公开了一种基于三轴传感器的跑步距离校正方法,其包括:S1:在GPS定位异常期间,获取三轴传感器采集到的在用户跑步方向上的x轴加速度数据和z轴加速度数据;S2:将两个轴的加速度数据进行融合,得到合成轴数据;S3:对合成轴数据的波峰和波谷进行检测,得到步态周期;S4:根据每一步态周期内的合成轴数据计算得到第一特征值、第二特征值、第三特征值、第四特征值、第五特征值和第六特征值,组成特征向量;S5:将特征向量输入预先训练好的线性回归模型,得到步长预测值;S6:计算步长预测值与GPS定位异常期间的步态周期数量
一种基于三轴地磁传感器的设备姿态识别方法.pdf
本发明公开了一种基于三轴地磁传感器的设备姿态识别方法,包括以下步骤:将三轴地磁传感器分别与踏频传感器、速度传感器绑定,形成踏频传感器组合、速度传感器组合,将踏频传感器组合置于自行车的脚踏曲柄处,将速度传感器组合置于自行车的后轮轮轴处,采集并分析所述自行车的骑行数据,得出三轴地磁传感器的磁感线分量曲线走势,作为设备姿态识别依据,用于判定传感器所绑定的具体位置及类型,本发明根据三轴地磁传感器磁感线在X轴、Y轴、Z轴的分量及曲线走势对设备姿态进行识别,达到踏频传感器、速度传感器二合一的效果,实现一个设备同时具有

基于六轴姿态传感器的患者跌落报警系统的设计.docx
基于六轴姿态传感器的患者跌落报警系统的设计基于六轴姿态传感器的患者跌倒报警系统设计摘要:随着人口老龄化趋势的加剧,老年人的健康问题越来越受到关注。跌倒是老年人最常见的意外事件之一,严重影响了老年人的生活质量和安全。基于六轴姿态传感器的患者跌倒报警系统是一种新颖的技术手段,能够实时监测患者的姿态变化,及时发现患者的跌倒行为,并通过报警装置及时提醒护理人员。本文将详细介绍该系统的设计和实现方法。关键词:六轴姿态传感器、跌倒报警、老年人、健康问题引言随着医疗技术的进步和社会经济的发展,人们的寿命不断延长,老年人