
语音控制系统和语音控制方法、智能设备.pdf

文宣****66

1/8
2/8
3/8
4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

语音控制系统和语音控制方法、智能设备.pdf
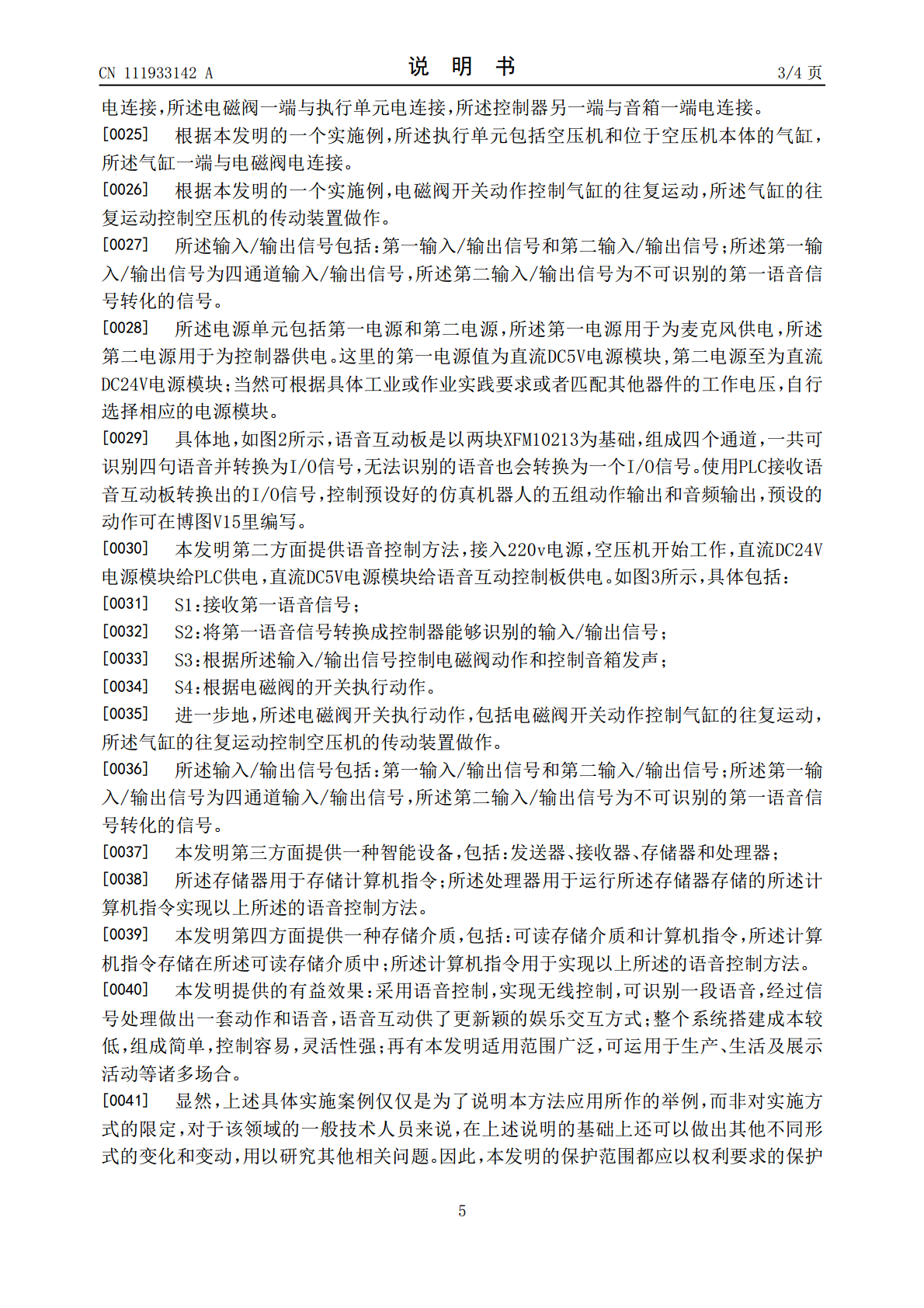
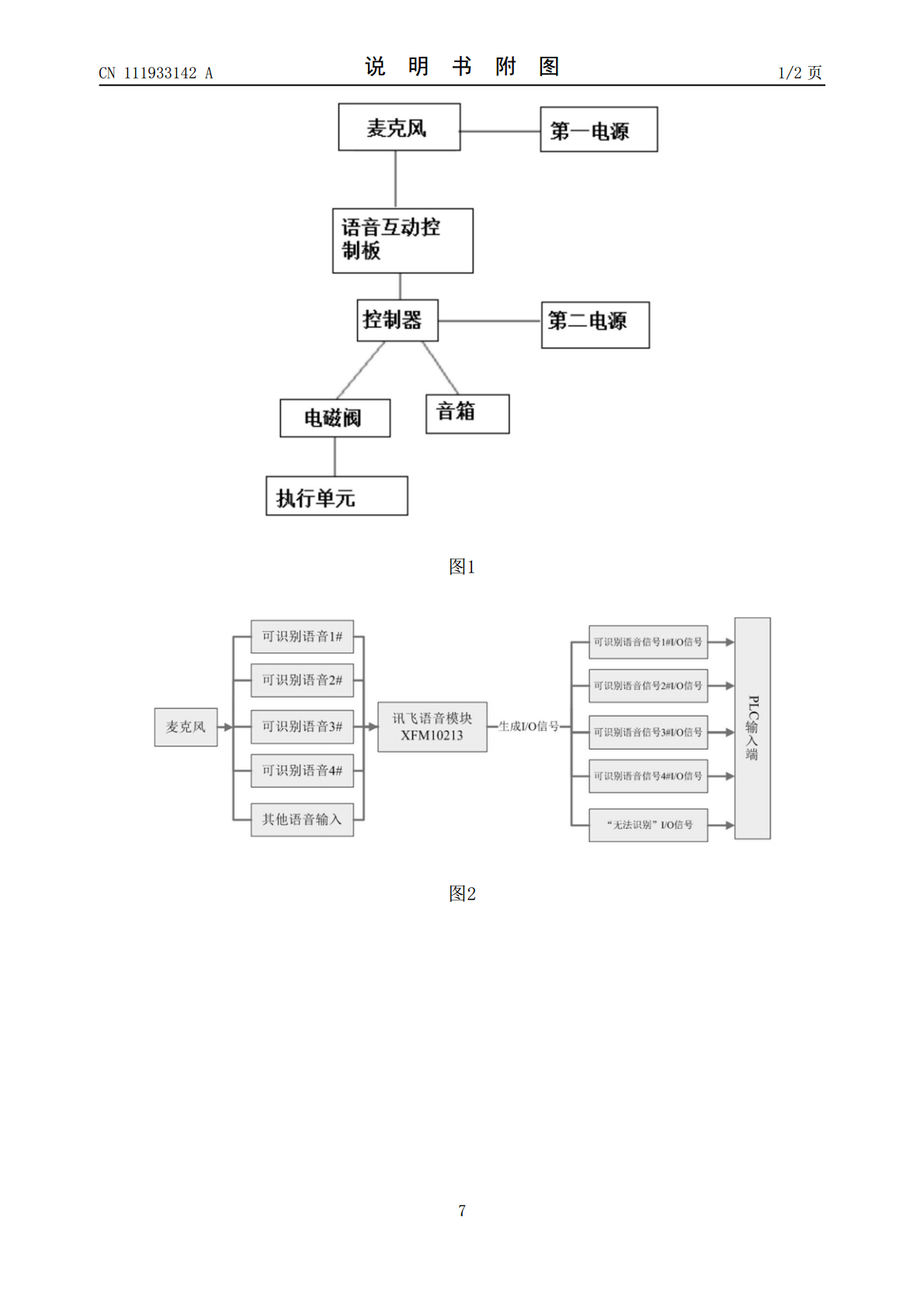
本发明提供一种语音控制系统和语音控制方法,包括:电源单元、麦克风、语音互动控制板、控制器、电磁阀、音箱和执行单元;麦克风接收第一语音信号,语音互动控制板将第一语音信号转换成控制器能够识别的输入/输出信号;控制器根据所述输入/输出信号控制电磁阀动作和控制音箱发声;电磁阀开关动作控制气缸的往复运动,所述气缸的往复运动控制空压机的传动装置做作。采用语音控制,实现无线控制,可识别一段语音,经过信号处理做出一套动作和语音,语音互动为游客提供了更新颖的娱乐交互方式;整个系统搭建成本较低,组成简单,控制容易,灵活性强;
语音控制系统和语音控制方法.pdf
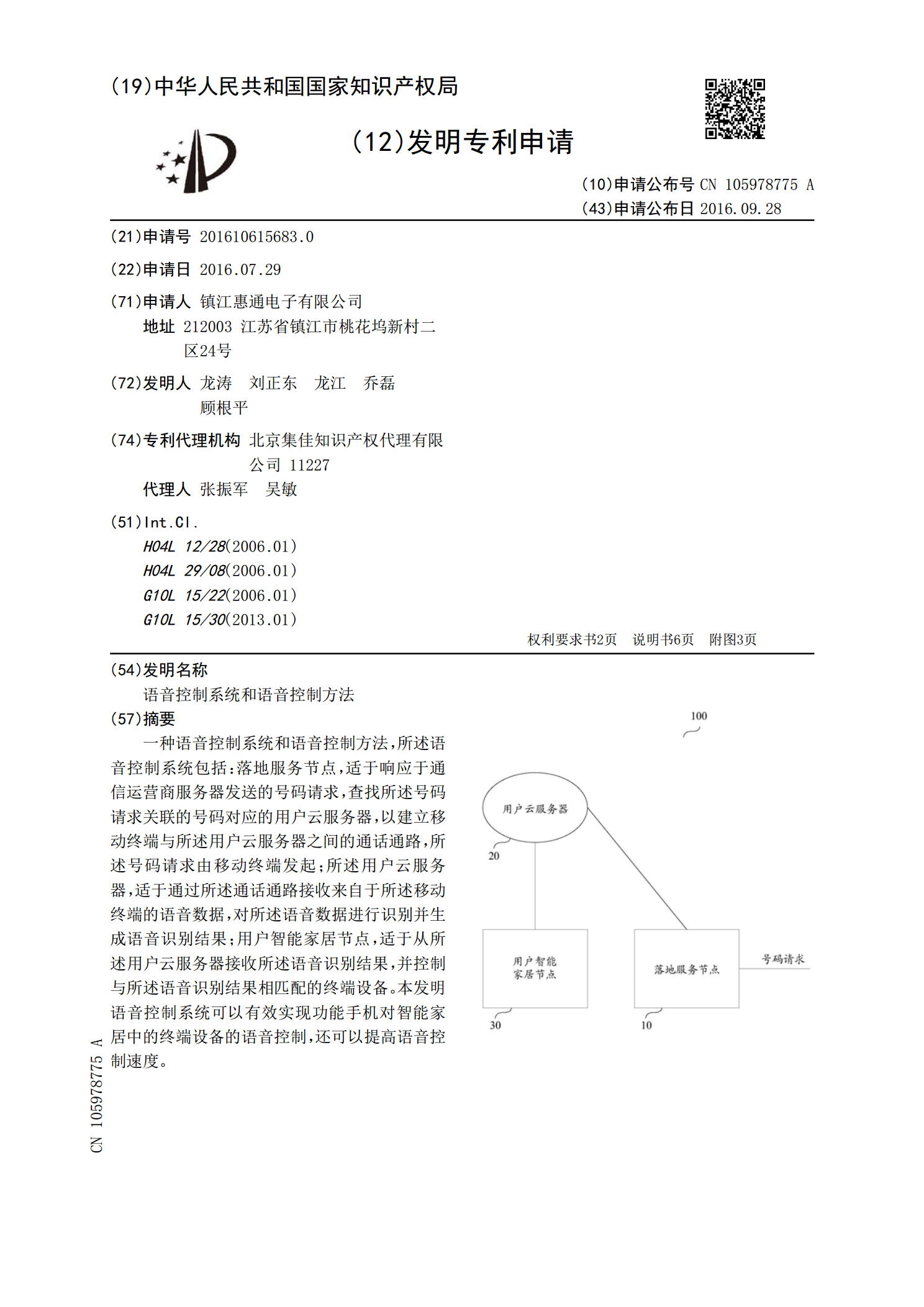
一种语音控制系统和语音控制方法,所述语音控制系统包括:落地服务节点,适于响应于通信运营商服务器发送的号码请求,查找所述号码请求关联的号码对应的用户云服务器,以建立移动终端与所述用户云服务器之间的通话通路,所述号码请求由移动终端发起;所述用户云服务器,适于通过所述通话通路接收来自于所述移动终端的语音数据,对所述语音数据进行识别并生成语音识别结果;用户智能家居节点,适于从所述用户云服务器接收所述语音识别结果,并控制与所述语音识别结果相匹配的终端设备。本发明语音控制系统可以有效实现功能手机对智能家居中的终端设备
用于控制智能语音设备的方法、装置及智能语音设备.pdf
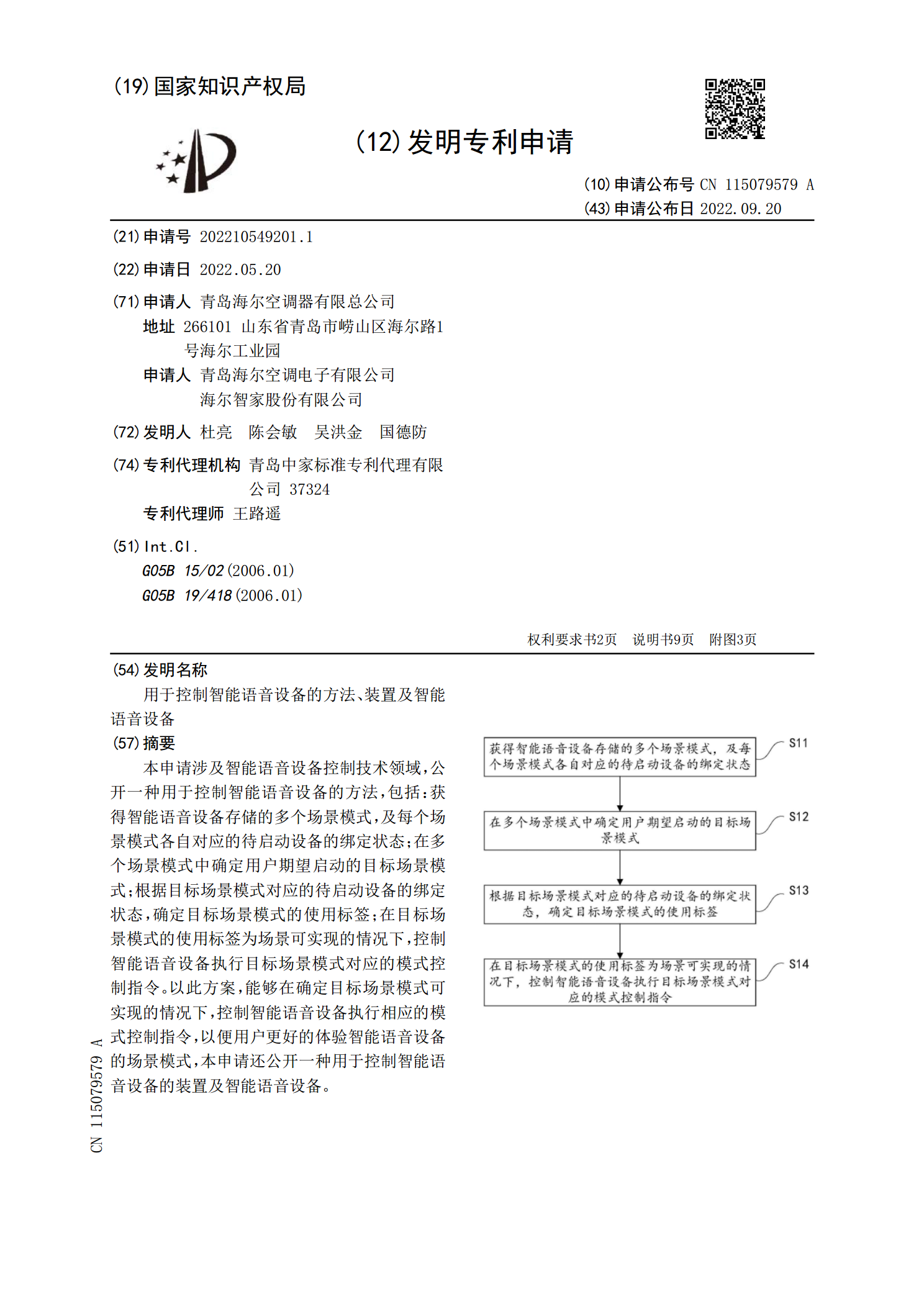
本申请涉及智能语音设备控制技术领域,公开一种用于控制智能语音设备的方法,包括:获得智能语音设备存储的多个场景模式,及每个场景模式各自对应的待启动设备的绑定状态;在多个场景模式中确定用户期望启动的目标场景模式;根据目标场景模式对应的待启动设备的绑定状态,确定目标场景模式的使用标签;在目标场景模式的使用标签为场景可实现的情况下,控制智能语音设备执行目标场景模式对应的模式控制指令。以此方案,能够在确定目标场景模式可实现的情况下,控制智能语音设备执行相应的模式控制指令,以便用户更好的体验智能语音设备的场景模式,本
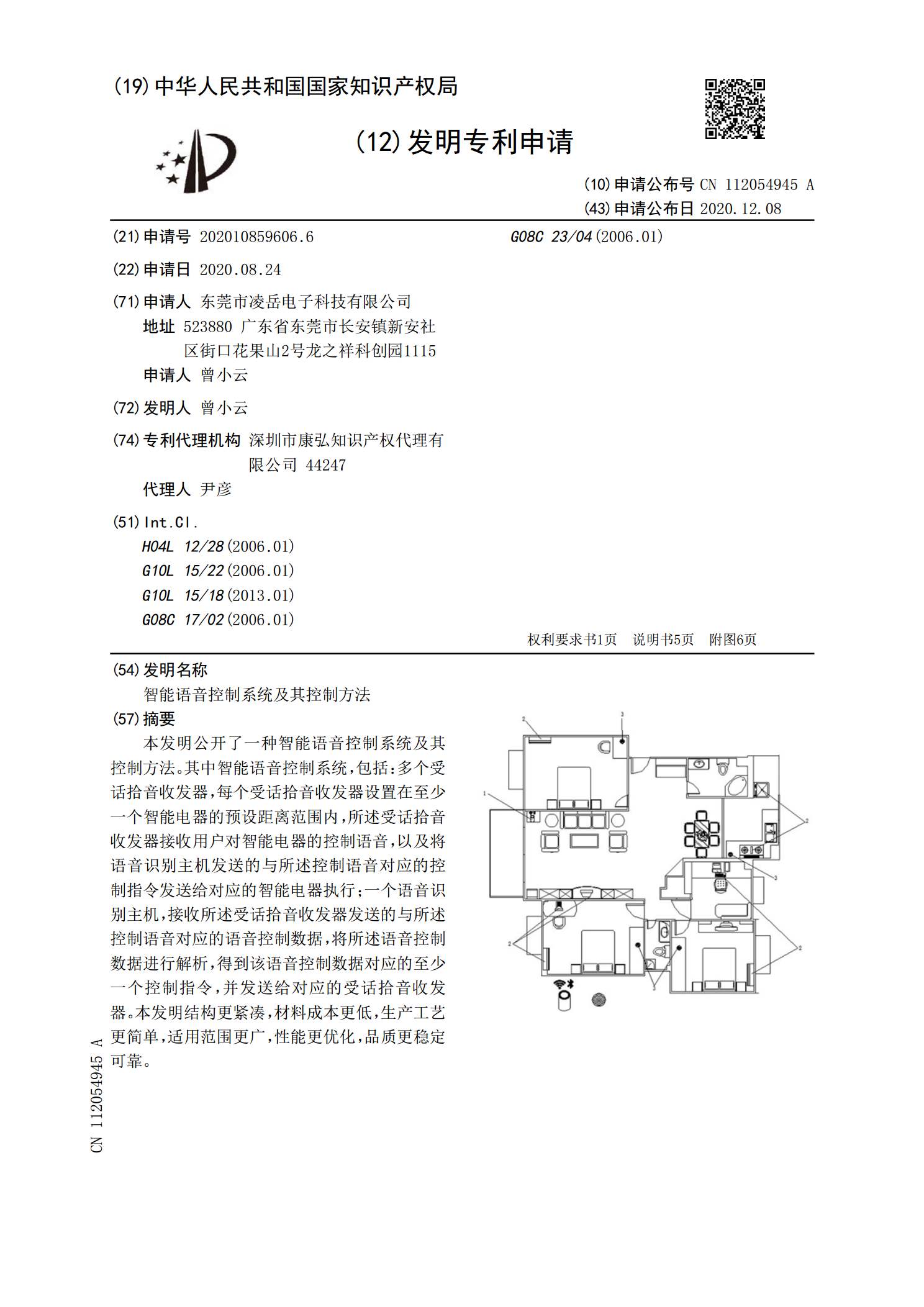
智能语音控制系统及其控制方法.pdf
本发明公开了一种智能语音控制系统及其控制方法。其中智能语音控制系统,包括:多个受话拾音收发器,每个受话拾音收发器设置在至少一个智能电器的预设距离范围内,所述受话拾音收发器接收用户对智能电器的控制语音,以及将语音识别主机发送的与所述控制语音对应的控制指令发送给对应的智能电器执行;一个语音识别主机,接收所述受话拾音收发器发送的与所述控制语音对应的语音控制数据,将所述语音控制数据进行解析,得到该语音控制数据对应的至少一个控制指令,并发送给对应的受话拾音收发器。本发明结构更紧凑,材料成本更低,生产工艺更简单,适用
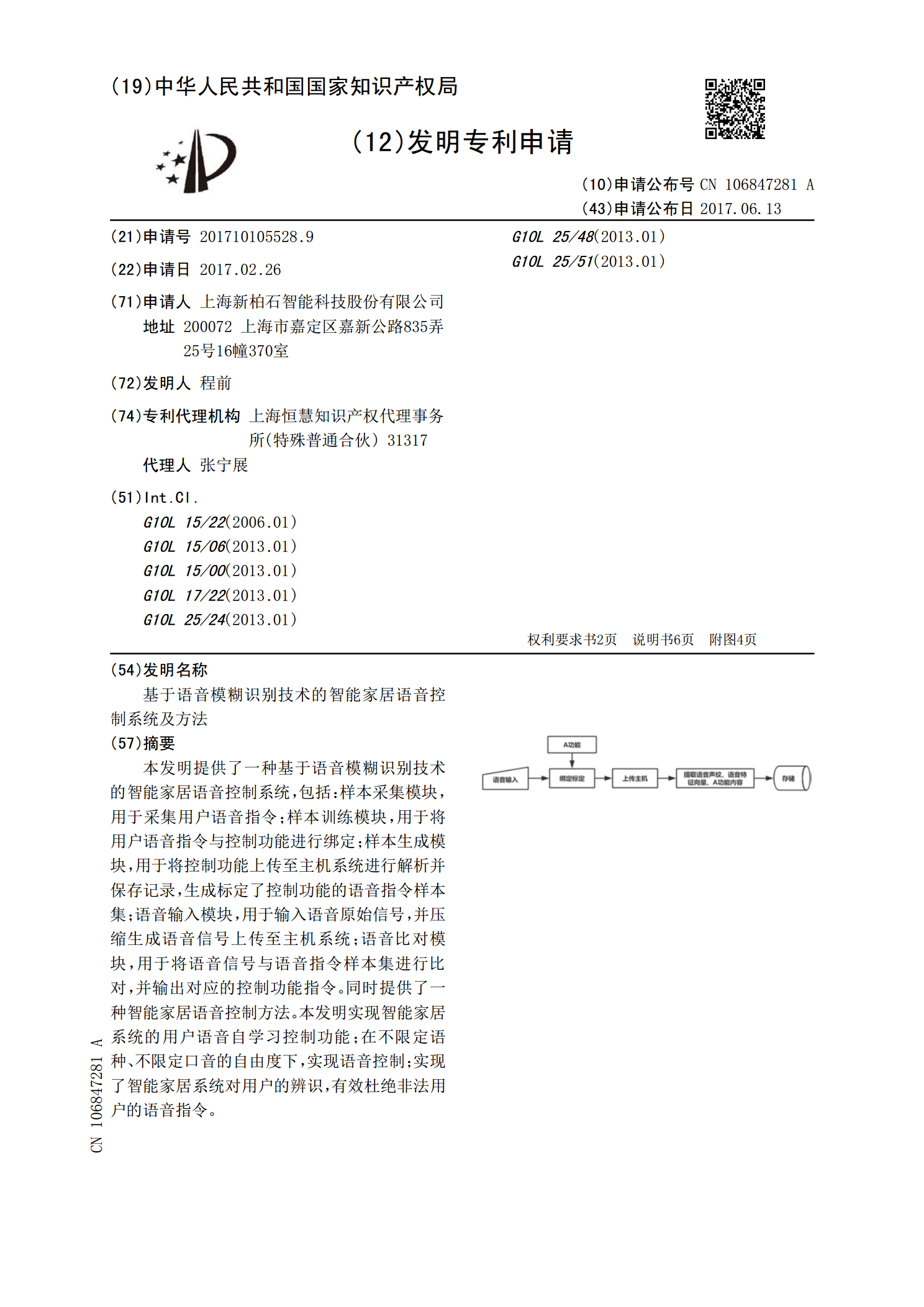
基于语音模糊识别技术的智能家居语音控制系统及方法.pdf
本发明提供了一种基于语音模糊识别技术的智能家居语音控制系统,包括:样本采集模块,用于采集用户语音指令;样本训练模块,用于将用户语音指令与控制功能进行绑定;样本生成模块,用于将控制功能上传至主机系统进行解析并保存记录,生成标定了控制功能的语音指令样本集;语音输入模块,用于输入语音原始信号,并压缩生成语音信号上传至主机系统;语音比对模块,用于将语音信号与语音指令样本集进行比对,并输出对应的控制功能指令。同时提供了一种智能家居语音控制方法。本发明实现智能家居系统的用户语音自学习控制功能;在不限定语种、不限定口音