
一种光栅式自定位测距装置.pdf

山柳****魔王


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种光栅式自定位测距装置.pdf
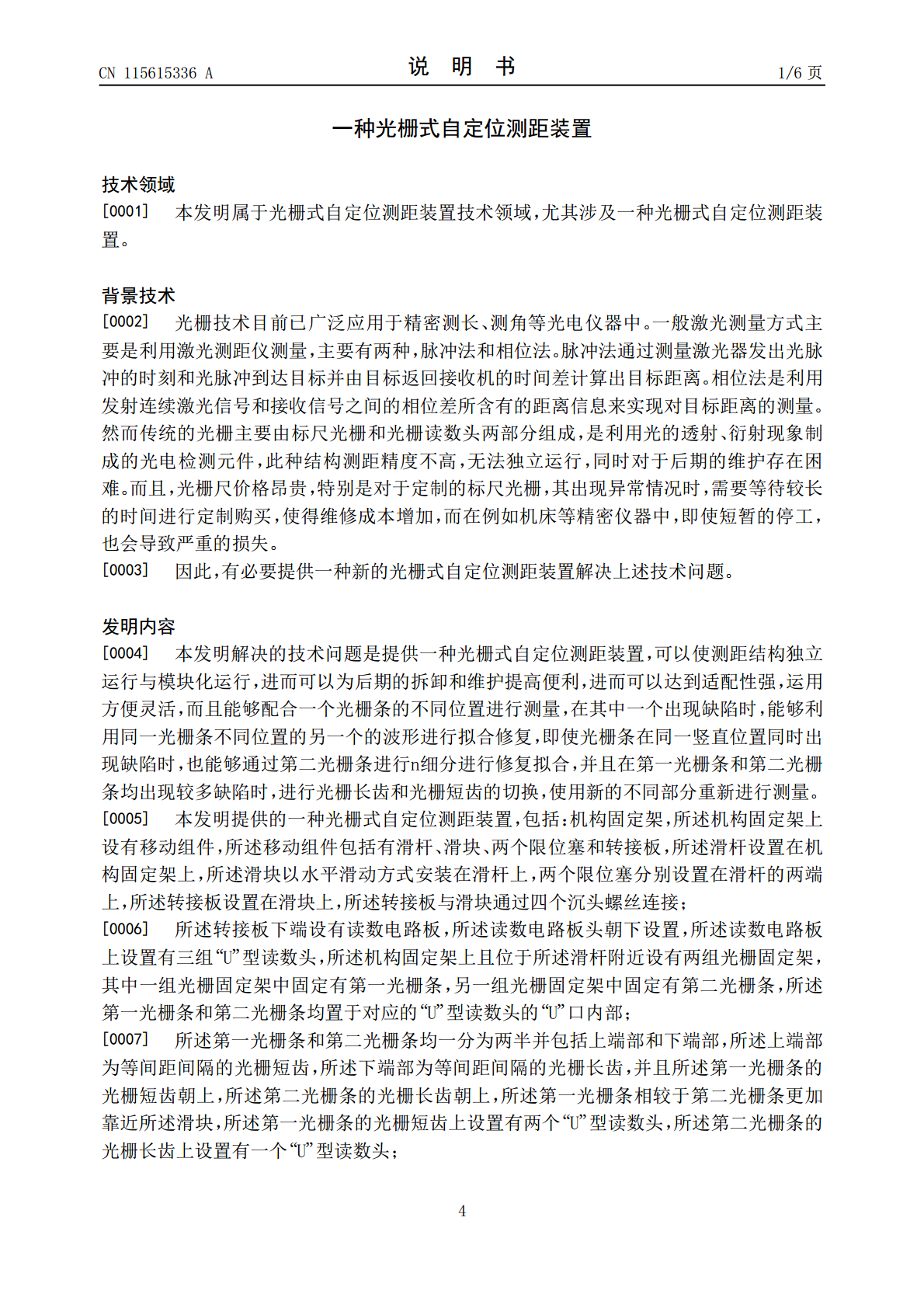
本发明提供一种光栅式自定位测距装置,所述光栅式自定位测距装置包括:机构固定架,所述机构固定架上设有移动组件,所述移动组件包括有滑杆、滑块、两个限位塞和转接板,所述滑杆设置在机构固定架上,所述滑块滑动安装在滑杆上,两个限位塞分别设置在滑杆的两端上,所述转接板设置在滑块上,所述转接板与滑块通过四个沉头螺丝连接;所述转接板上设有读数电路板,所述读数电路板头朝下设置,所述读数电路板上设置有三组“U”型读数头。本发明提供的光栅式自定位测距装置操作简单,可以使测距结构独立运行与模块化运行,便于后期拆卸和维护,运用方便

一种轨道定位测距装置.pdf
本发明提供一种轨道定位测距装置,包括与机车行走轮相匹配的至少一个定位测距单件,定位测距单件包括可调连接件和编码器组件;可调连接件用于连接机车行走轮和机车车架;编码器组件与机车行走轮相连接。应用本发明的技术方案,效果是:定位测距单件的数量根据实际情况选择,满足不同的需求;可调连接件用于连接机车行走轮和机车车架,使得机车行走轮能进行靠近机车车架和远离机车车架的运动,无论是平坦道路,还是有坡度的道路,都不影响对机车的定位和速度测量,适用性强;所述编码器组件与机车行走轮相连接,能同步获取机车行走轮的运动速度,精准

一种测距仪变向定位装置.pdf
本发明涉及一种测距仪变向定位装置,有效的解决了测距仪在使用过程中方向调节不方便,测距仪操作费时费力的问题;其解决的技术方案包括球体座,球体座壳体端面上设有多个沿球面的凸起,球体座内部安装有球体,球体上设有一个导向键,第一锥齿轮上方固定有凹形支架,凹形支架贯穿有调节杆,调节杆一端安装有齿轮,齿轮一侧啮合有竖直放置的齿条,第一锥齿轮上方设有活动盘,活动盘上端面设有环形凹槽,卡块下端卡装在环形凹槽内,齿条与齿轮始终保持啮合;活动盘下端面安装有滑动支架,滑动支架、L形转杆、立杆和操控杆构成平行四边形连杆结构,操控

一种激光测距仪的定位装置.pdf
本发明公开了一种激光测距仪的定位装置,包含一导电轨、一激光板和一定位杆,所述的定位杆一端安装一调高座,且所述的定位杆上设置一导轨,所述的导轨两侧均设置若干个停留孔,且所述的导轨上卡接一调距座,所述的调距座上方安装一激光板,所述的激光板上设置若干个配合孔,且所述的激光板一侧安装一激光灯,所述的激光灯外侧套设一灯托,所述的灯托下方设置一隔离架,所述的导电轨一端设置一固定桩,且所述的导电轨外侧套设一活动块。该装置通过两个激光灯照射对所需位置进行定位,而且在定位后装置的稳定性高,能有效避免装置移动影响测距,还可以
一种光栅式后视镜调节装置.pdf
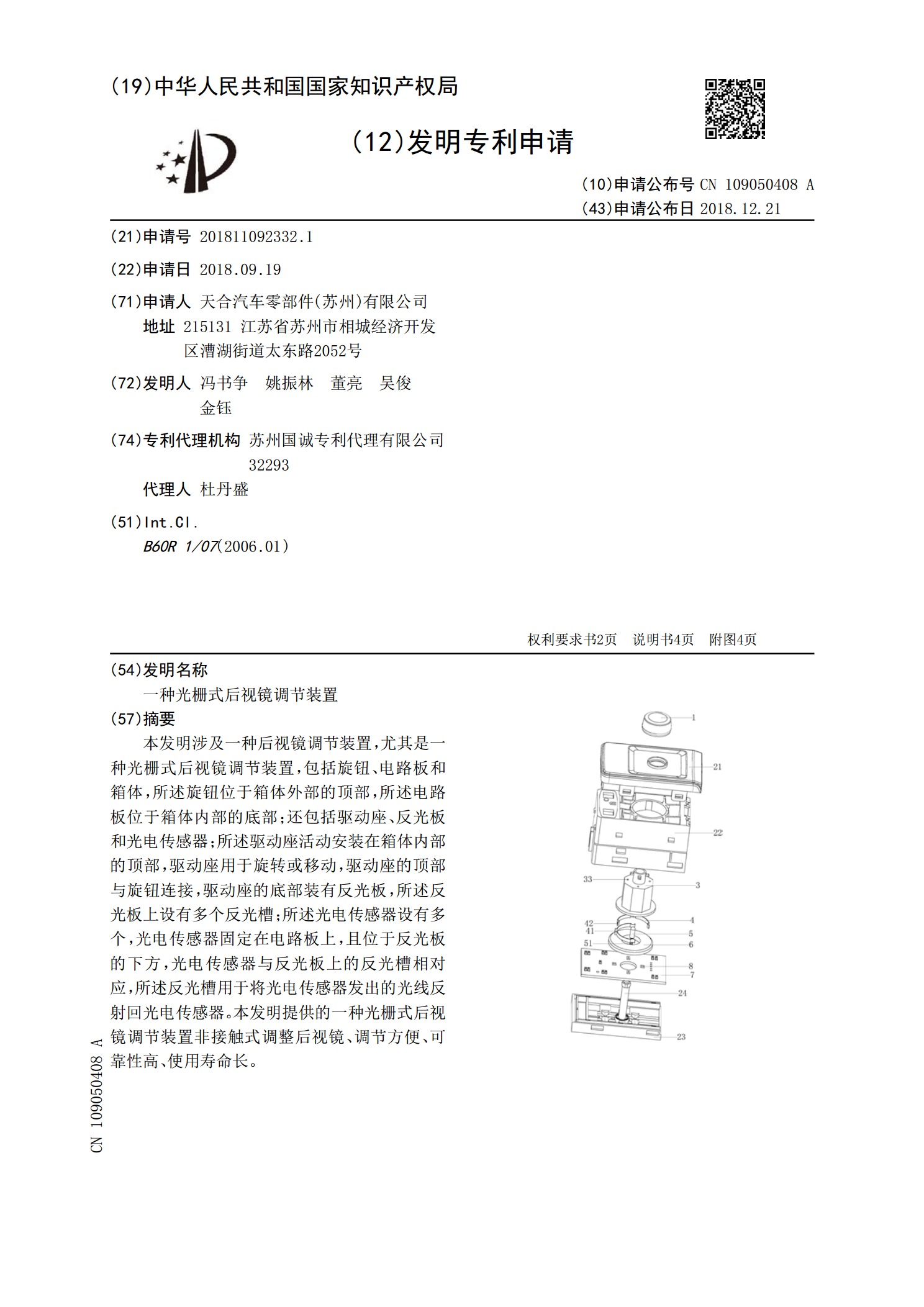
本发明涉及一种后视镜调节装置,尤其是一种光栅式后视镜调节装置,包括旋钮、电路板和箱体,所述旋钮位于箱体外部的顶部,所述电路板位于箱体内部的底部;还包括驱动座、反光板和光电传感器;所述驱动座活动安装在箱体内部的顶部,驱动座用于旋转或移动,驱动座的顶部与旋钮连接,驱动座的底部装有反光板,所述反光板上设有多个反光槽;所述光电传感器设有多个,光电传感器固定在电路板上,且位于反光板的下方,光电传感器与反光板上的反光槽相对应,所述反光槽用于将光电传感器发出的光线反射回光电传感器。本发明提供的一种光栅式后视镜调节装置非