
基于非局部的三马尔可夫随机场SAR图像分割方法.pdf

努力****幻翠


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于非局部的三马尔可夫随机场SAR图像分割方法.pdf
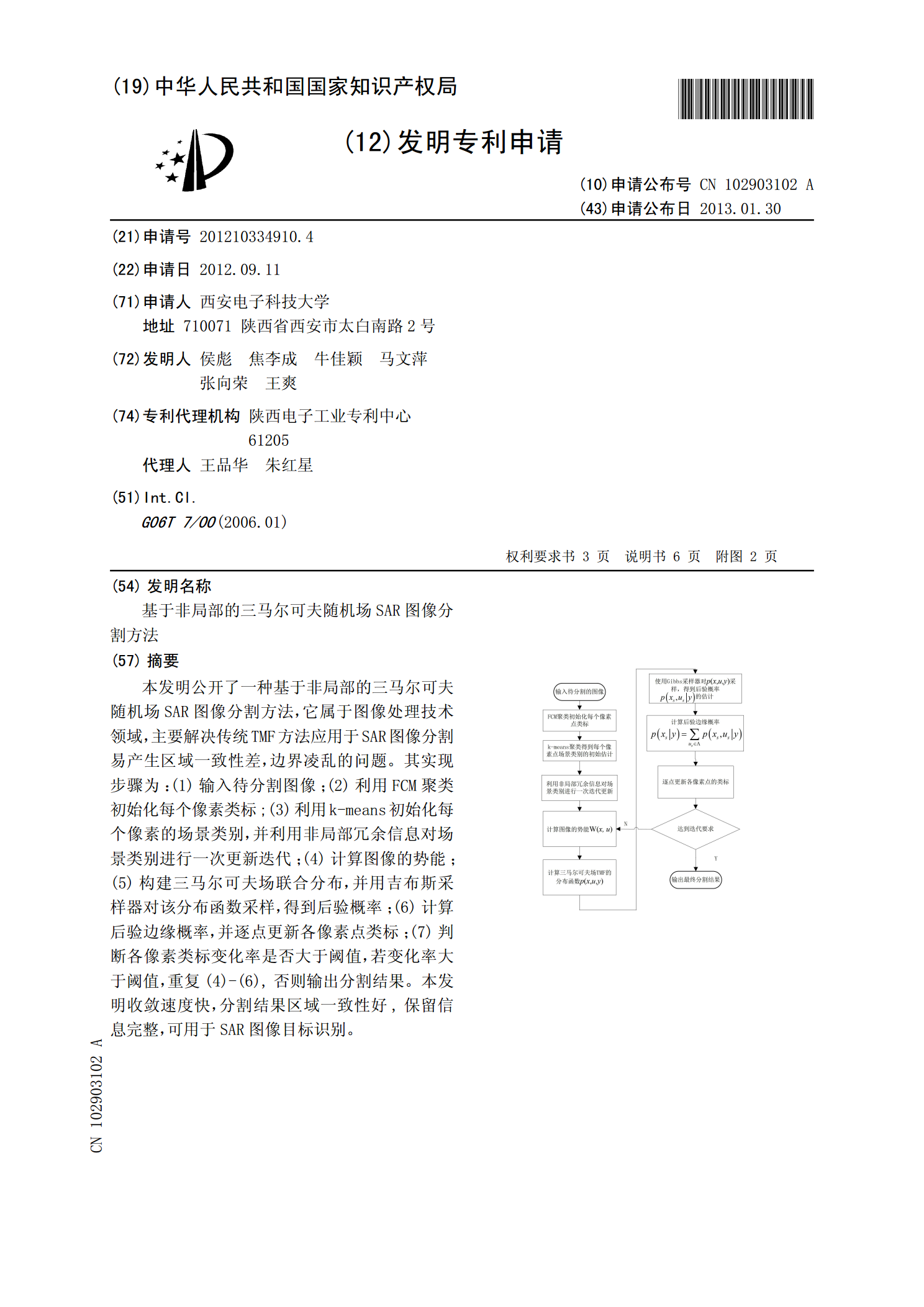
本发明公开了一种基于非局部的三马尔可夫随机场SAR图像分割方法,它属于图像处理技术领域,主要解决传统TMF方法应用于SAR图像分割易产生区域一致性差,边界凌乱的问题。其实现步骤为:(1)输入待分割图像;(2)利用FCM聚类初始化每个像素类标;(3)利用k-means初始化每个像素的场景类别,并利用非局部冗余信息对场景类别进行一次更新迭代;(4)计算图像的势能;(5)构建三马尔可夫场联合分布,并用吉布斯采样器对该分布函数采样,得到后验概率;(6)计算后验边缘概率,并逐点更新各像素点类标;(7)判断各像素类标

基于局部水平集和非局部MRF的SAR图像分割方法的中期报告.docx
基于局部水平集和非局部MRF的SAR图像分割方法的中期报告一、研究背景及意义合成孔径雷达(SyntheticApertureRadar,SAR)是一种主动传感器,不受云、雾、雨、夜间等气象条件的限制,因此被广泛应用于军事和民用领域。SAR图像具有分辨率高、多角度获取、波长长等特点,但也具有噪声大、复杂背景等问题,因此对SAR图像的自动分割和目标识别具有重要的研究意义和应用价值。目前,SAR图像分割是SAR图像处理中的一个重要环节,在自动目标识别、机器人导航、环境监控等领域中均有广泛应用。SAR图像分割的主

基于马尔可夫随机场模型的图像分割技术研究的开题报告.docx
基于马尔可夫随机场模型的图像分割技术研究的开题报告一、选题背景及意义随着计算机图像处理技术的不断发展,图像分割技术已经成为了计算机视觉领域中最基础的技术之一。图像分割的目的是将数字图像中的像素划分为不同的区域或物体。在实际应用中,图像分割技术被广泛应用于医学图像分析、机器视觉、模式识别、智能交通等领域。然而,图像分割的问题并不是简单的像素分类问题,而是一个具有复杂性和不确定性的问题。马尔可夫随机场在模式识别和计算机视觉领域中广泛应用。马尔可夫随机场是一种能够描述局部相互作用的图模型,具有自然的建模能力,能

基于马尔可夫随机场模型的图像分割技术研究的中期报告.docx
基于马尔可夫随机场模型的图像分割技术研究的中期报告一、研究背景图像分割是计算机视觉领域的一个基础问题,其主要目的是将图像分割成具有相似特征的若干个区域。基于马尔可夫随机场模型的图像分割技术在近年来备受关注,已经成为图像分割研究的热点之一。本中期报告旨在介绍我在该领域内的研究进展。二、研究内容1.马尔可夫随机场模型介绍首先,我对马尔可夫随机场模型进行了深入研究。该模型主要用于描述变量之间的关系,在图像分割中,可以表示邻近像素的相似性关系。我归纳总结了几种常见的马尔可夫随机场模型,包括二元马尔可夫随机场模型、

基于马尔可夫随机场的膝关节磁共振图像分割方法的研究的综述报告.docx
基于马尔可夫随机场的膝关节磁共振图像分割方法的研究的综述报告概述膝关节磁共振成像(MRI)图像分割是医学图像分析领域的一个重要问题,它对于膝关节的疾病诊断和治疗起着至关重要的作用。近年来,基于马尔可夫随机场的分割方法已成为MRI图像分割领域的研究热点。本文将综述基于马尔可夫随机场的膝关节MRI图像分割方法的研究进展,主要包括分割方法的基本原理、常见算法及其优缺点,以及未来的发展方向。基本原理概率图模型是图像分割领域中常用的建模方法。其中,马尔可夫随机场(MRF)是最常用的概率图模型之一。MRF是一种基于概