
一种包含擦拭功能的自动清洁装置.pdf

灵波****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种包含擦拭功能的自动清洁装置.pdf
本发明实施例公开了一种包含擦拭功能的自动清洁装置,通过应用本发明实施例所提出的技术方案,实现了一种包含擦拭功能的自动清洁装置,在该自动清洁装置中,自身浸水的擦拭单元在驱动单元的驱动下旋转,在与待清洁平面相平行接触的情况下对待清洁平面进行擦拭,实现了对待清洁平面上所残留的污垢,尤其是顽固性污垢进行清除,在无需人工帮助的情况下,提高了清洁效果,在具体的应用场景中,本发明实施例进一步提出了擦拭单元自动回洗的技术方案,进一步简化了人工操作,保证了清洁效果。
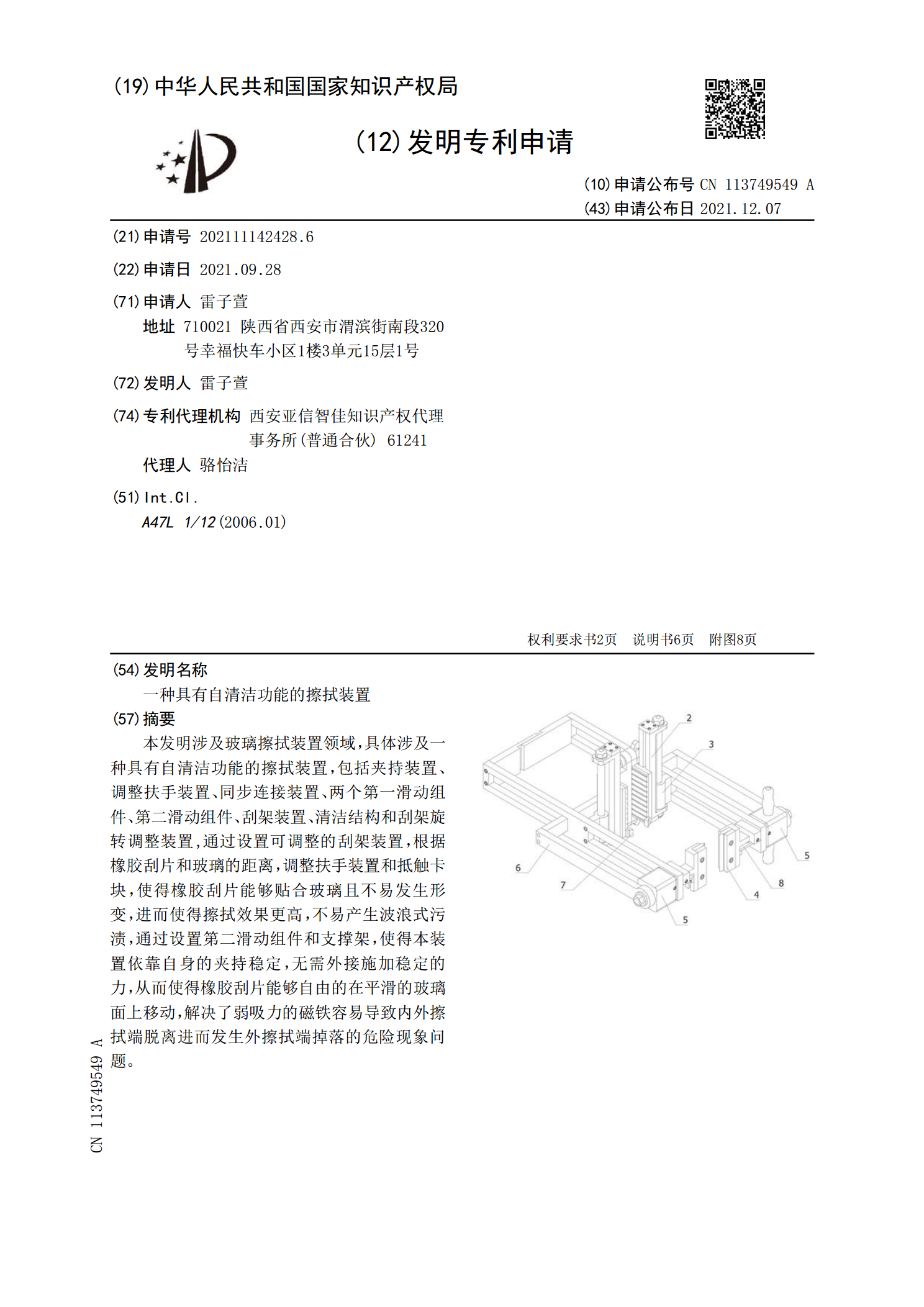
一种具有自清洁功能的擦拭装置.pdf
本发明涉及玻璃擦拭装置领域,具体涉及一种具有自清洁功能的擦拭装置,包括夹持装置、调整扶手装置、同步连接装置、两个第一滑动组件、第二滑动组件、刮架装置、清洁结构和刮架旋转调整装置,通过设置可调整的刮架装置,根据橡胶刮片和玻璃的距离,调整扶手装置和抵触卡块,使得橡胶刮片能够贴合玻璃且不易发生形变,进而使得擦拭效果更高,不易产生波浪式污渍,通过设置第二滑动组件和支撑架,使得本装置依靠自身的夹持稳定,无需外接施加稳定的力,从而使得橡胶刮片能够自由的在平滑的玻璃面上移动,解决了弱吸力的磁铁容易导致内外擦拭端脱离进而
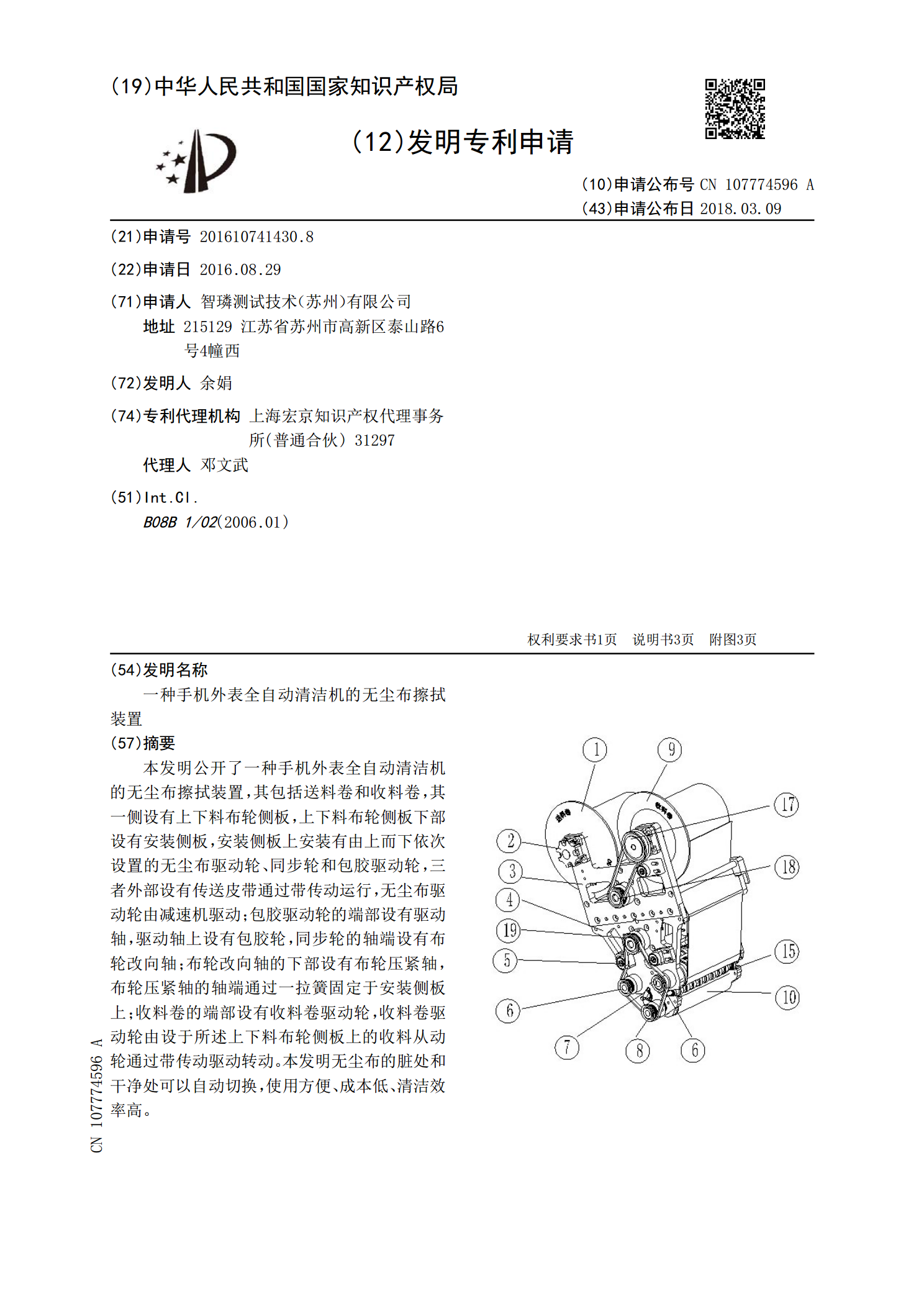
一种手机外表全自动清洁机的无尘布擦拭装置.pdf
本发明公开了一种手机外表全自动清洁机的无尘布擦拭装置,其包括送料卷和收料卷,其一侧设有上下料布轮侧板,上下料布轮侧板下部设有安装侧板,安装侧板上安装有由上而下依次设置的无尘布驱动轮、同步轮和包胶驱动轮,三者外部设有传送皮带通过带传动运行,无尘布驱动轮由减速机驱动;包胶驱动轮的端部设有驱动轴,驱动轴上设有包胶轮,同步轮的轴端设有布轮改向轴;布轮改向轴的下部设有布轮压紧轴,布轮压紧轴的轴端通过一拉簧固定于安装侧板上;收料卷的端部设有收料卷驱动轮,收料卷驱动轮由设于所述上下料布轮侧板上的收料从动轮通过带传动驱动
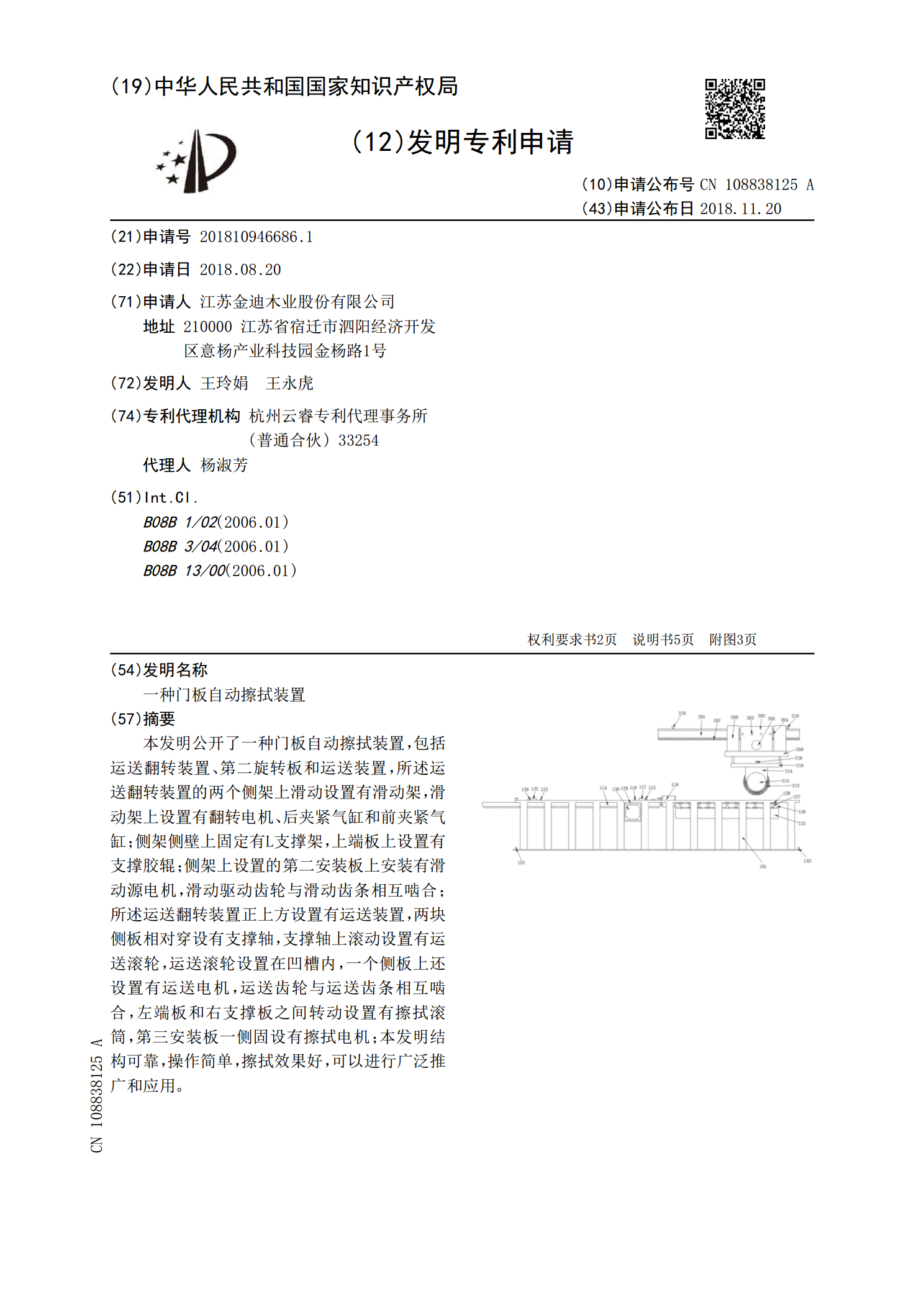
一种门板自动擦拭装置.pdf
本发明公开了一种门板自动擦拭装置,包括运送翻转装置、第二旋转板和运送装置,所述运送翻转装置的两个侧架上滑动设置有滑动架,滑动架上设置有翻转电机、后夹紧气缸和前夹紧气缸;侧架侧壁上固定有L支撑架,上端板上设置有支撑胶辊;侧架上设置的第二安装板上安装有滑动源电机,滑动驱动齿轮与滑动齿条相互啮合;所述运送翻转装置正上方设置有运送装置,两块侧板相对穿设有支撑轴,支撑轴上滚动设置有运送滚轮,运送滚轮设置在凹槽内,一个侧板上还设置有运送电机,运送齿轮与运送齿条相互啮合,左端板和右支撑板之间转动设置有擦拭滚筒,第三安装
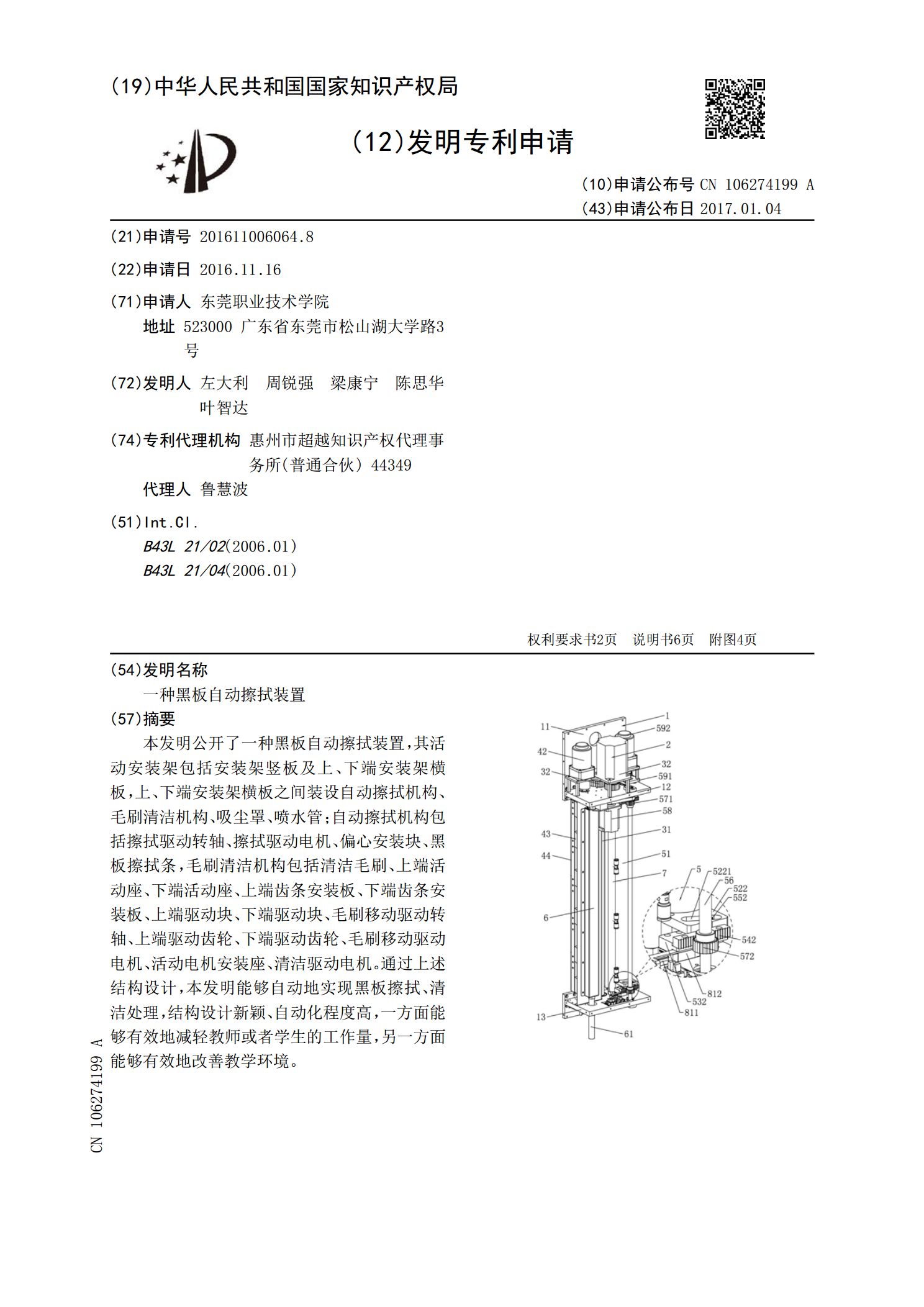
一种黑板自动擦拭装置.pdf
本发明公开了一种黑板自动擦拭装置,其活动安装架包括安装架竖板及上、下端安装架横板,上、下端安装架横板之间装设自动擦拭机构、毛刷清洁机构、吸尘罩、喷水管;自动擦拭机构包括擦拭驱动转轴、擦拭驱动电机、偏心安装块、黑板擦拭条,毛刷清洁机构包括清洁毛刷、上端活动座、下端活动座、上端齿条安装板、下端齿条安装板、上端驱动块、下端驱动块、毛刷移动驱动转轴、上端驱动齿轮、下端驱动齿轮、毛刷移动驱动电机、活动电机安装座、清洁驱动电机。通过上述结构设计,本发明能够自动地实现黑板擦拭、清洁处理,结构设计新颖、自动化程度高,一方