
基于置信度的深度图融合方法.pdf

一只****呀淑


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于置信度的深度图融合方法.pdf
本发明提出了一种基于置信度的深度图融合方法。由于匹配信息弱或噪声影响,深度计算精度难以保证,从而导致深度图融合变得困难。为此,本发明提出了一种基于置信度的抗噪融合算法。该方法首先对每幅深度图进行修正,利用一致性检测剔除大多数错误点并填补某些空洞。其次,通过保留那些在自身邻域内具有最高置信度的三维点以删除冗余。最后,将深度图反投影到三维空间,采用迭代最小二乘法进一步优化三维点并剔除离群点。通过在标准测试数据集上与其他算法比较,验证了该方法的有效性。

基于置信度的深度图融合.docx
基于置信度的深度图融合摘要:深度图融合已经成为许多计算机视觉和机器人领域的重要问题,因为它可以提高视觉系统的稳定性和鲁棒性。本文提出了一种基于置信度的深度图融合方法,该方法可以结合多个深度图来生成一个更准确,更稳定的深度图。该方法将深度图融合分为两个步骤:深度图的初始化和深度图的融合。初始化过程使用光流技术和运动模型来对不同的深度图进行对齐和匹配,以减少深度图融合时的误差。融合过程通过计算每个像素的置信度来选择最合适的深度值。实验结果表明,该方法在视觉导航和三维重建等领域具有较高的应用价值。关键词:深度图

一种基于置信度的深度图融合方法.docx
一种基于置信度的深度图融合方法基于置信度的深度图融合方法摘要:深度图融合是计算机视觉领域中的一个重要任务。本论文提出了一种基于置信度的深度图融合方法,该方法能够将多个深度图像融合为一个更准确的深度图像。我们通过计算每个像素点的置信度,并结合邻近像素点的信息进行融合,提高了深度图像的质量。我们在公开数据集和实际应用场景中进行了实验,结果表明我们的方法在深度图融合任务中具有较好的性能和鲁棒性。1.引言深度图融合是计算机视觉领域的一个重要任务,它在三维重建、增强现实等应用中起到关键作用。然而,在深度图像采集过程
基于置信度分级及级间融合增强的深度估计方法及系统.pdf
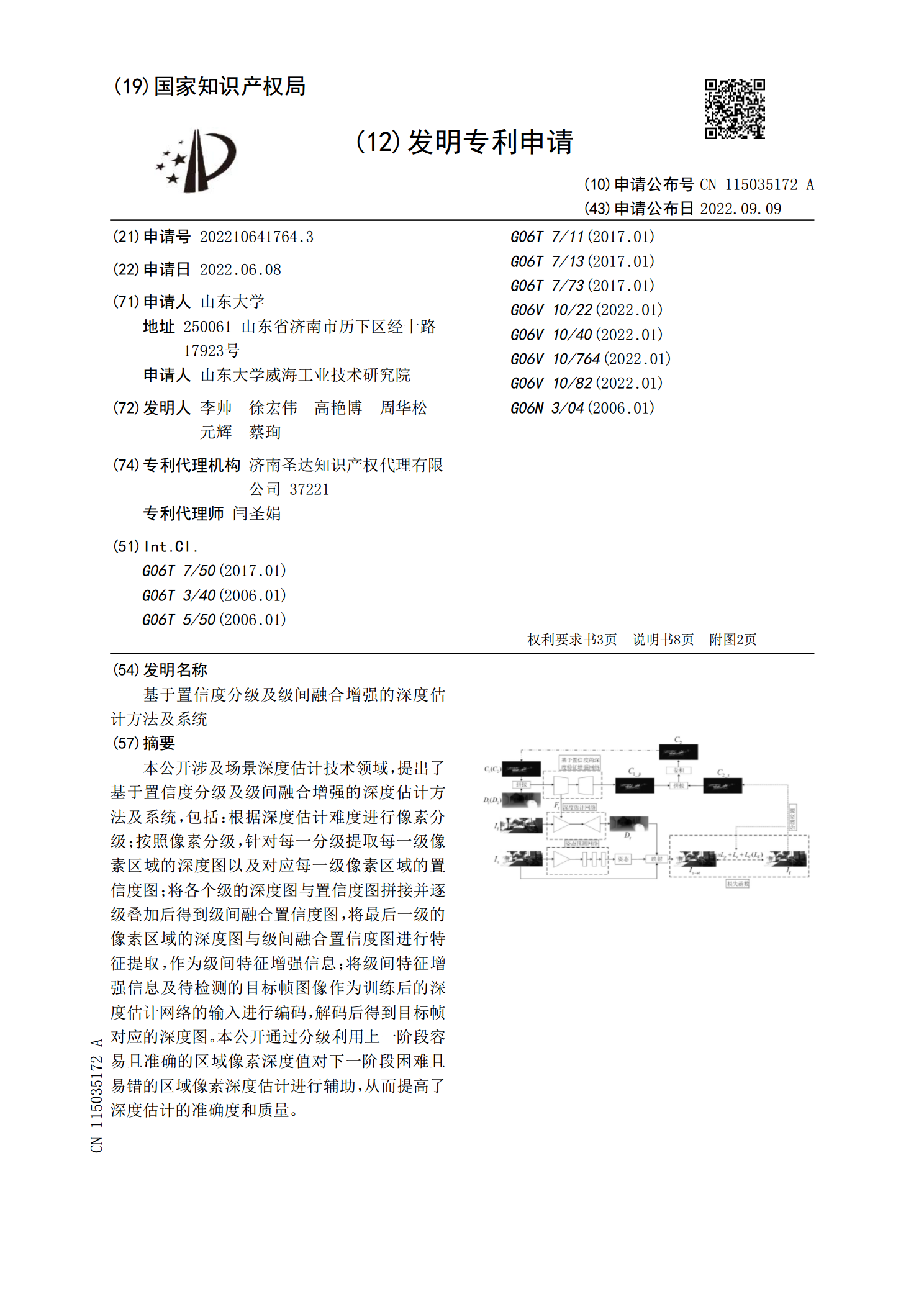
本公开涉及场景深度估计技术领域,提出了基于置信度分级及级间融合增强的深度估计方法及系统,包括:根据深度估计难度进行像素分级;按照像素分级,针对每一分级提取每一级像素区域的深度图以及对应每一级像素区域的置信度图;将各个级的深度图与置信度图拼接并逐级叠加后得到级间融合置信度图,将最后一级的像素区域的深度图与级间融合置信度图进行特征提取,作为级间特征增强信息;将级间特征增强信息及待检测的目标帧图像作为训练后的深度估计网络的输入进行编码,解码后得到目标帧对应的深度图。本公开通过分级利用上一阶段容易且准确的区域像素

基于PSR验前信息可信度的Bayes数据融合方法.docx
基于PSR验前信息可信度的Bayes数据融合方法现今,随着信息技术的快速发展以及数据获取渠道的不断拓宽,数据融合已成为越来越重要的研究领域。在数据融合的过程中,如何确定数据的可信度及如何进行有效的数据融合是需要考虑的重要问题。本文将介绍一种基于PSR验前信息可信度的Bayes数据融合方法,该方法可以有效地解决在数据融合中遇到的问题。本文首先介绍了PSR(ProbabilisticSafetyAssessment)方法的基本概念及其在风险评估方面的应用。PSR方法是一种基于概率的安全评估方法,它可以对复杂系