
一种具有目标识别功能的推土装置.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种具有目标识别功能的推土装置.pdf
本发明公开了一种具有目标识别功能的推土装置,包括推土机和安装在推土机上的监控装置,监控装置具体包括预处理模块、检测跟踪模块、识别输出模块,其中预处理模块包含图像转化、图像滤波、图像增强三个子模块,检测跟踪模块包含构建、丢失判别、更新三个子模块。本推土机将视频图像技术运用在推土机上,能有效监控记录恶意破坏行为,具有实时性好、定位准确、自适应能力强、图像细节保留完整和鲁棒性强等优点。
一种具有目标识别功能的摄像装置.pdf
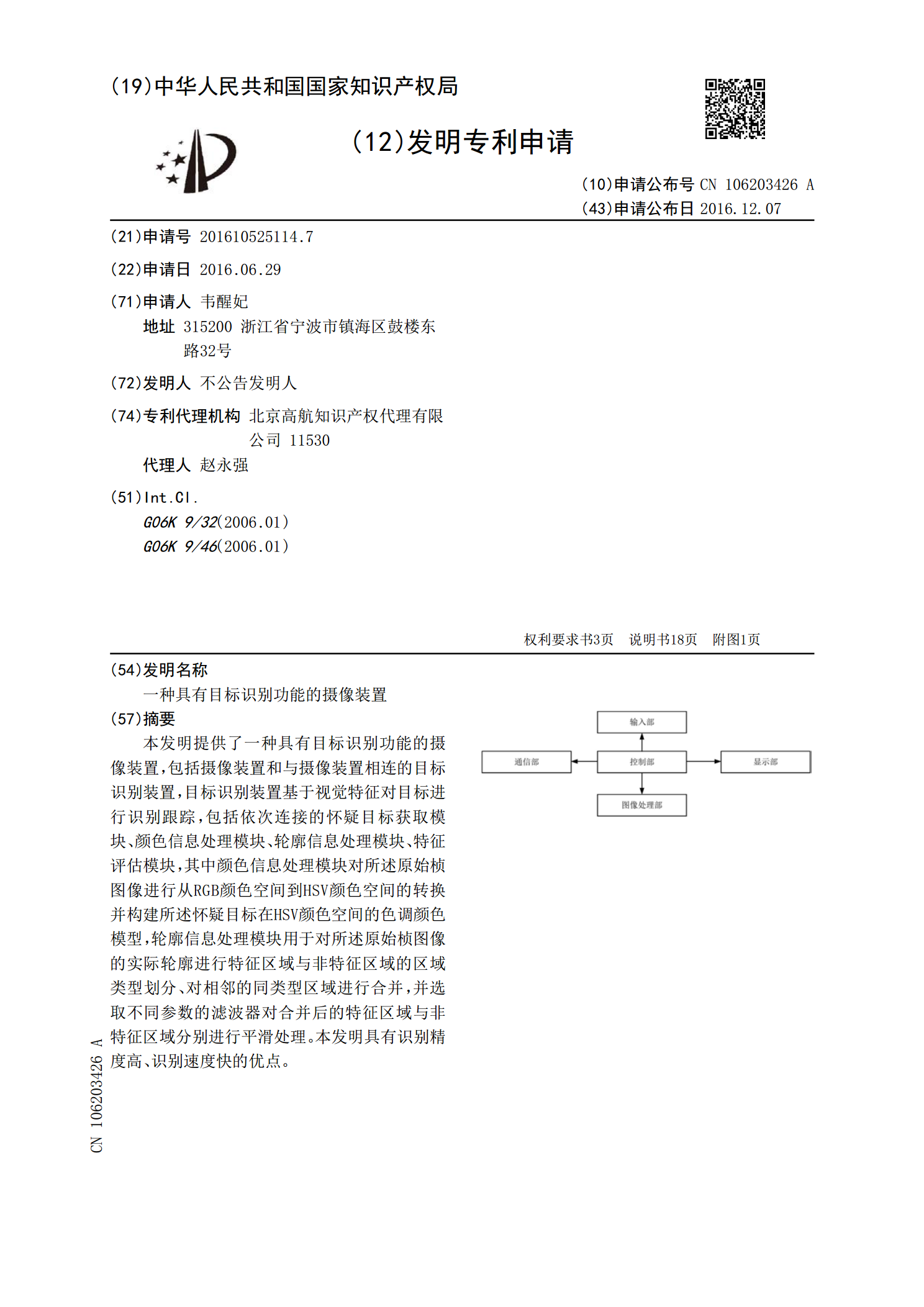
本发明提供了一种具有目标识别功能的摄像装置,包括摄像装置和与摄像装置相连的目标识别装置,目标识别装置基于视觉特征对目标进行识别跟踪,包括依次连接的怀疑目标获取模块、颜色信息处理模块、轮廓信息处理模块、特征评估模块,其中颜色信息处理模块对所述原始桢图像进行从RGB颜色空间到HSV颜色空间的转换并构建所述怀疑目标在HSV颜色空间的色调颜色模型,轮廓信息处理模块用于对所述原始桢图像的实际轮廓进行特征区域与非特征区域的区域类型划分、对相邻的同类型区域进行合并,并选取不同参数的滤波器对合并后的特征区域与非特征区域分

一种具有人脸识别功能的考勤装置.pdf
本发明涉及一种具有人脸识别功能的考勤装置,包括主体和键盘,还包括升降机构和扫描机构,所述扫描机构包括第一驱动组件、支撑套管、两个移动套管、两个传动杆、两个支撑杆和两个采集组件,所述升降机构包括第二驱动组件、升降基座、两个导轨和两个安装板,所述第一驱动组件包括第二电机、转盘和两个连接线,所述采集组件包括连接套管、转动轴、驱动单元和第二摄像头,该具有人脸识别功能的考勤装置中,通过扫描机构驱动两个第二摄像头移动,从而通过两个第二摄像头分别从两侧对用户人脸信息进行采集,从而提高了考勤机人脸识别的精确度,通过升降机
一种具有调节功能的识别能力强的指静脉识别装置.pdf
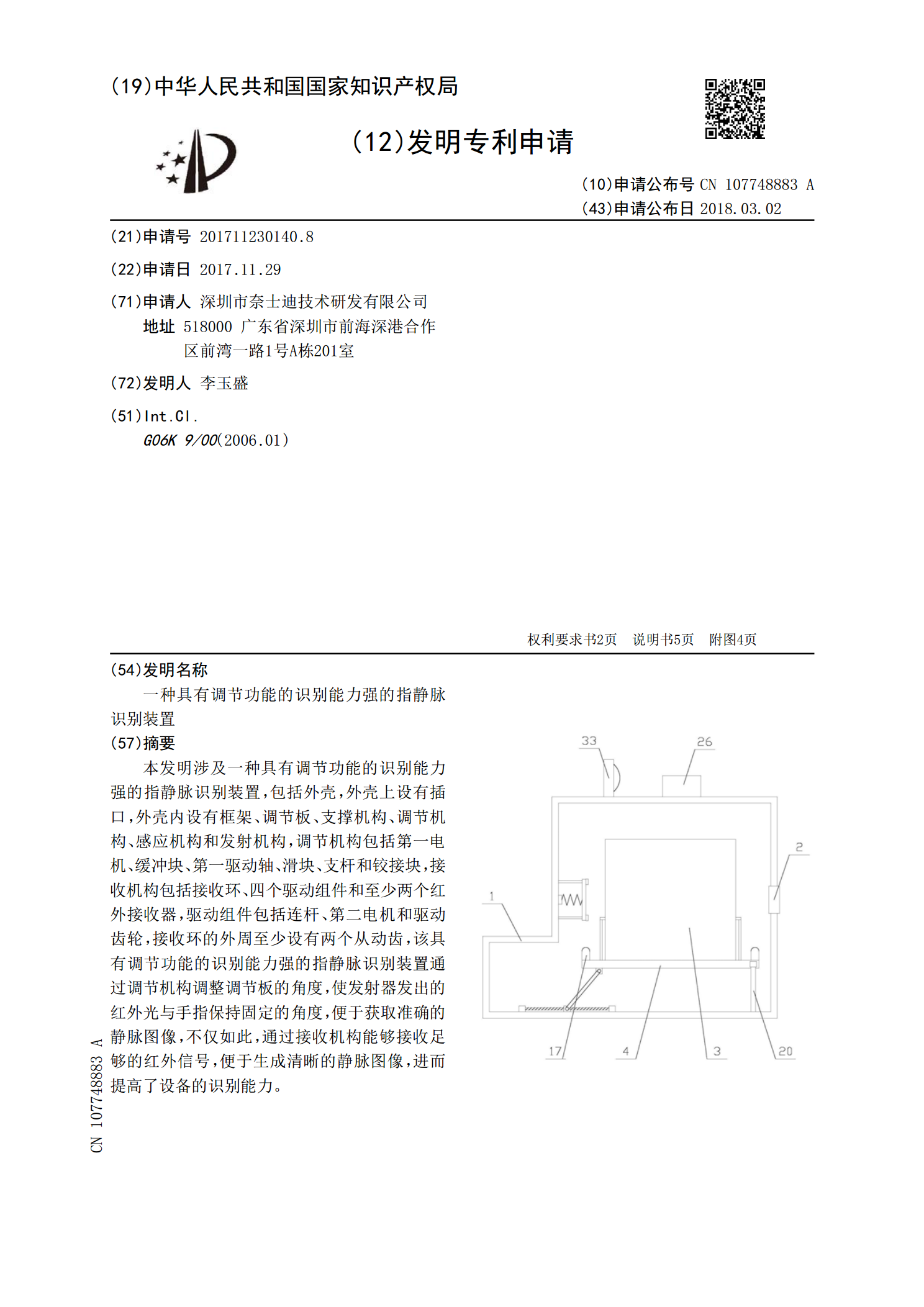
本发明涉及一种具有调节功能的识别能力强的指静脉识别装置,包括外壳,外壳上设有插口,外壳内设有框架、调节板、支撑机构、调节机构、感应机构和发射机构,调节机构包括第一电机、缓冲块、第一驱动轴、滑块、支杆和铰接块,接收机构包括接收环、四个驱动组件和至少两个红外接收器,驱动组件包括连杆、第二电机和驱动齿轮,接收环的外周至少设有两个从动齿,该具有调节功能的识别能力强的指静脉识别装置通过调节机构调整调节板的角度,使发射器发出的红外光与手指保持固定的角度,便于获取准确的静脉图像,不仅如此,通过接收机构能够接收足够的红外

具有哭声识别功能的冲泡装置.pdf
本发明公开了具有哭声识别功能的冲泡装置,包括:冲泡装置主体和设置在冲泡装置内的哭声识别装置;所述哭声识别装置包括:依次连接的语音信息采集模块、语音信息处理模块和哭声识别模块;所述冲泡装置还包括控制器,所述控制器与哭声识别模块电连接。本发明所述的具有哭声识别功能的冲泡装置能够通过实时监测并与预存的婴儿哭声信息进行比较,从而判断婴儿是否哭闹,以此进行奶粉冲泡,大大节约了给婴儿喂奶的时间,具有良好的实用价值。