
一种多波束测深离散点云数据的并行抽稀方法.pdf

明钰****甜甜


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多波束测深离散点云数据的并行抽稀方法.pdf
本发明涉及一种多波束测深离散点云数据的并行抽稀方法。目的是提供的方法应能在保留特征数据、确保成图质量的前提下,去除粗差数据,合理降低冗余量,将海量数据处理成轻量级数据。技术方案是:一种多波束测深离散点云数据的并行抽稀方法,按照以下步骤依次进行:1)对点云数据按平面坐标划分格网,以格网为单位作为并行计算的单元;2)计算单个格网中的多波束测深点云数据的正态分布、确定置信区间,删除粗差点数据;3)按照固定差值将单个格网中所有测深点数据的水深数据进行分层,并对每层的测深点随机抽样至少一个,实现单个格网测深数据的抽

一种改进的基于TIN的多波束测深数据抽稀算法.docx
一种改进的基于TIN的多波束测深数据抽稀算法标题:基于TIN的改进多波束测深数据抽稀算法摘要:多波束测深技术在海洋勘测和海底地形研究中起着至关重要的作用。然而,多波束测深数据通常具有大量的冗余信息,且数据量庞大,给数据处理和存储带来了巨大的负担。因此,本文提出了一种改进的基于三角不规则网格(TIN)的多波束测深数据抽稀算法,旨在减少冗余数据,同时保持数据的精度和准确性。关键词:多波束测深,TIN,数据抽稀,冗余数据1.引言多波束测深技术是目前海洋科研和工程勘测中广泛使用的一种技术手段。它通过同一时间内对海

一种基于距离阈值的并行点云抽稀方法.pdf
本发明提供一种基于距离阈值的并行点云抽稀方法,包括以下步骤:S1、并行统计原始点云空间范围,根据原始点云空间范围划分立方体,构建立方体链表;S2、并行把原始点云放入立方体链表中,确定所有点云在立方体链表中的位置;S3、计算每一个立方体的左下角坐标以及每一个立方体中包含的点云数量,合并所有立方体的链表;S4、根据距离阈值并行迭代每个立方体中的点云,在立方体链表中标记包含至少一个点云的体素,输出被标记体素中的一个点云到抽稀点云集合。本发明可以解决在对点云进行抽稀时,不能保留点云的几何特征,同时抽稀效率较低的技

一种多波束测深数据化简方法及装置.pdf
本发明涉及一种多波束测深数据化简方法及装置,属于海底地形综合技术领域。本发明采用稳定性更高的格网分割法实现测深数据点集的分组,避免了出现因聚类结果不正确而导致的点化简效果较差的情况,提高了化简效果;同时采用复杂度越高的子区域化简后保留点的个数越多的化简策略进行化简,保证了化简后数据表达地形的准确性,使得化简结果不仅满足航海图制图应用,还可用于构建海底地形模型和进行地形分析。
一种多波束探头校正方法和多波束测深数据校正方法.pdf
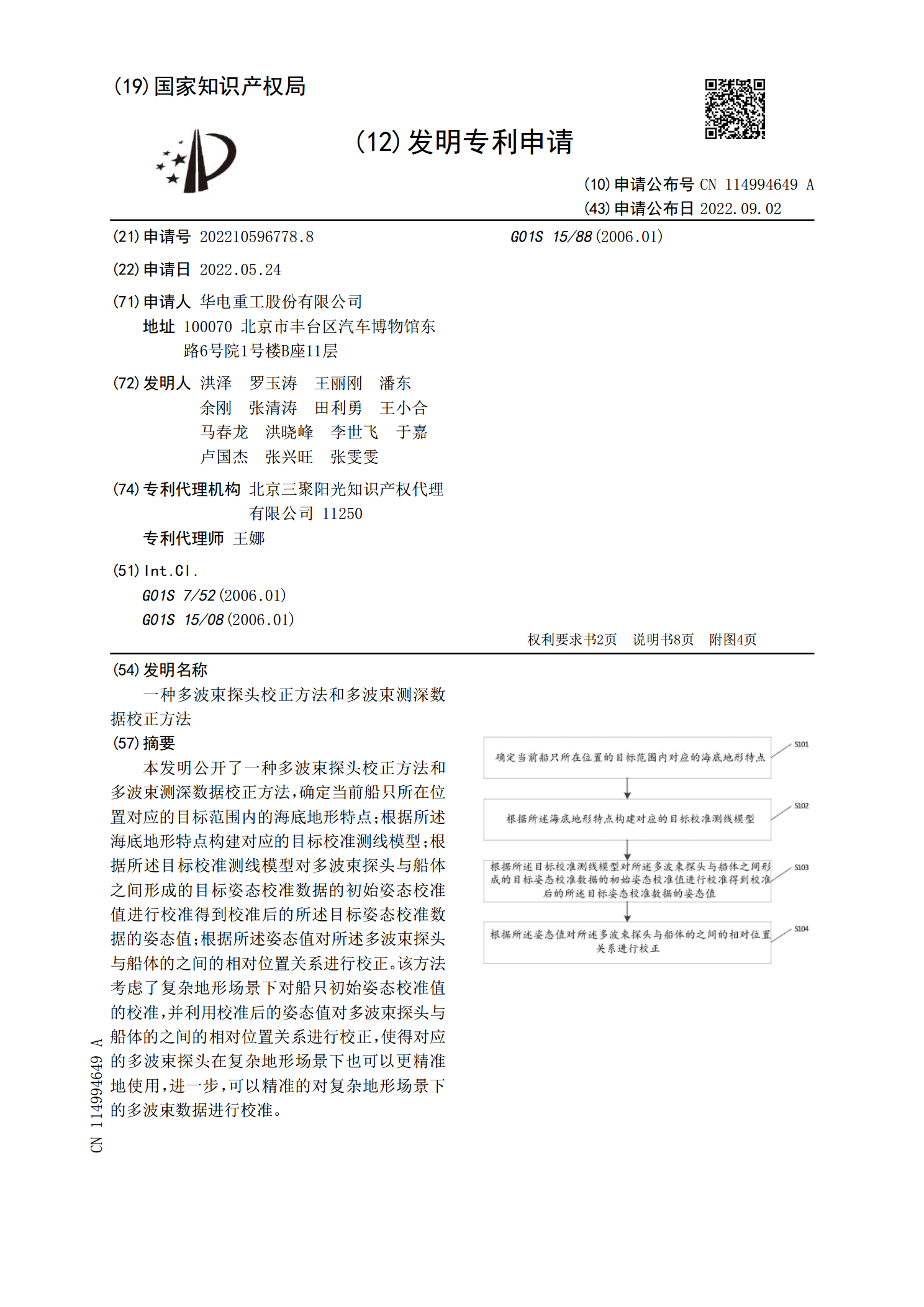
本发明公开了一种多波束探头校正方法和多波束测深数据校正方法,确定当前船只所在位置对应的目标范围内的海底地形特点;根据所述海底地形特点构建对应的目标校准测线模型;根据所述目标校准测线模型对多波束探头与船体之间形成的目标姿态校准数据的初始姿态校准值进行校准得到校准后的所述目标姿态校准数据的姿态值;根据所述姿态值对所述多波束探头与船体的之间的相对位置关系进行校正。该方法考虑了复杂地形场景下对船只初始姿态校准值的校准,并利用校准后的姿态值对多波束探头与船体的之间的相对位置关系进行校正,使得对应的多波束探头在复杂地