
一种含虚拟惯量控制的双馈风电机组降阶仿真系统及方法.pdf

一条****贺6


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种含虚拟惯量控制的双馈风电机组降阶仿真系统及方法.pdf
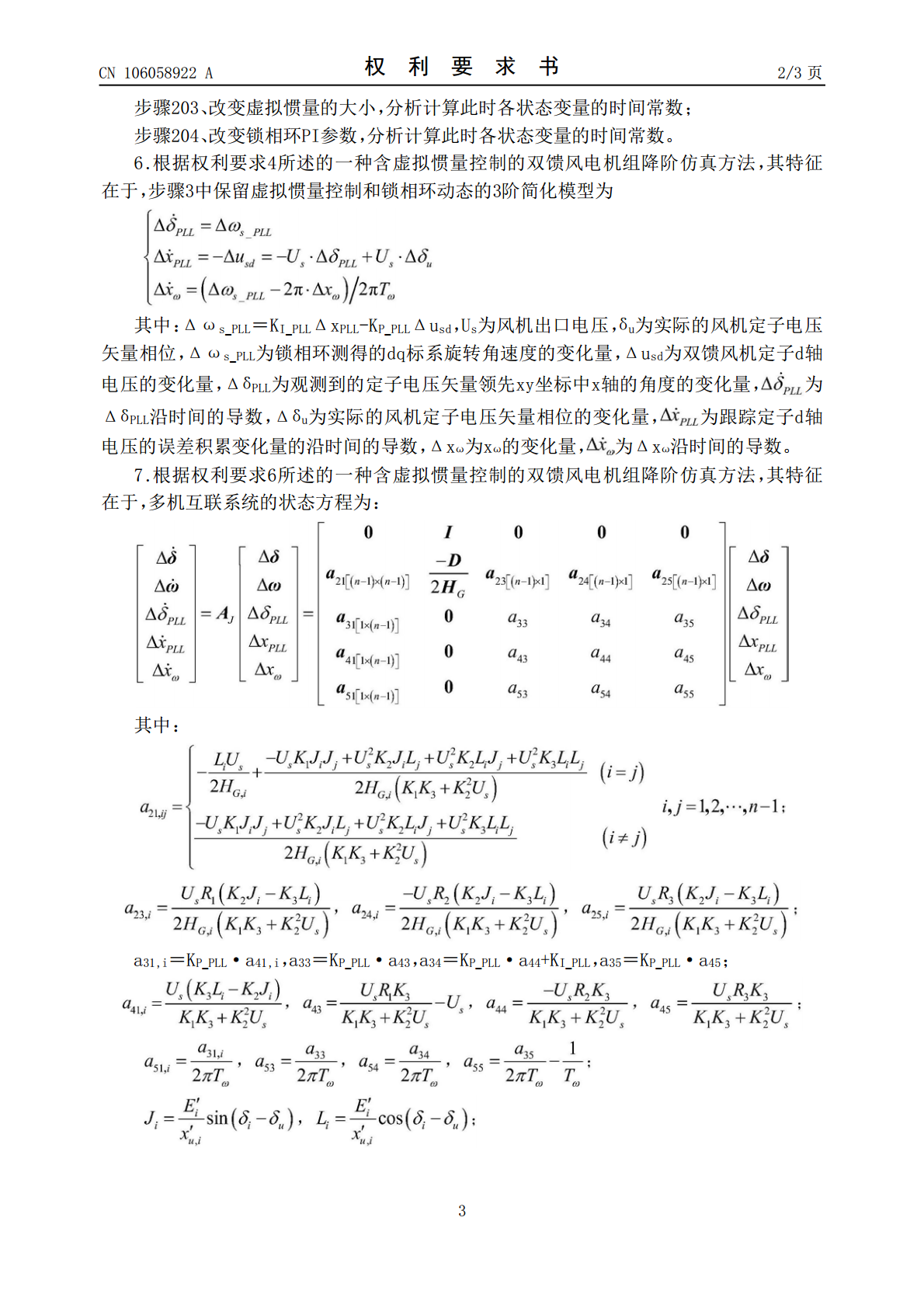
本发明公开了风力发电系统技术领域中一种含虚拟惯量控制的双馈风电机组降阶仿真系统及方法,该降阶仿真系统由数据采集模块、特征根分析模块、时域仿真验证模块以及结果输出模块顺序连接组成。仿真方法首先计算双馈风电机组各状态变量的衰减时间常数,并根据各状态变量的衰减快慢关系,从时间尺度探究双馈风电机组各组成部分的动态特性;然后计及机组机电耦合特性,推导保留虚拟惯量控制和锁相环动态的3阶简化模型;最后构建出降阶模型接入多机互联系统的动态模型。本发明能正确且有效地分析含虚拟惯量控制的双馈风电机组接入对系统小干扰稳定性的影

含虚拟惯量的双馈风电机组扭振分析与抑制方法研究的开题报告.docx
含虚拟惯量的双馈风电机组扭振分析与抑制方法研究的开题报告题目:含虚拟惯量的双馈风电机组扭振分析与抑制方法研究的开题报告一、研究背景风力发电作为清洁、可持续的新能源之一,正迅速发展。双馈式风电机组是目前应用最广泛、最成熟的风力发电技术之一。在双馈风电机组中,电动机和风轮间共同传动机构的存在会引起扭振问题,严重影响机组的安全运行和寿命。为了解决这一问题,已有许多关于双馈风电机组扭振分析与抑制方法的研究。然而,在实际应用中,由于风力资源分布不均、风速变化等原因,双馈风电机组的运行状态也是不稳定的,需要更具有鲁棒
一种风电机组模型降阶方法及系统.pdf
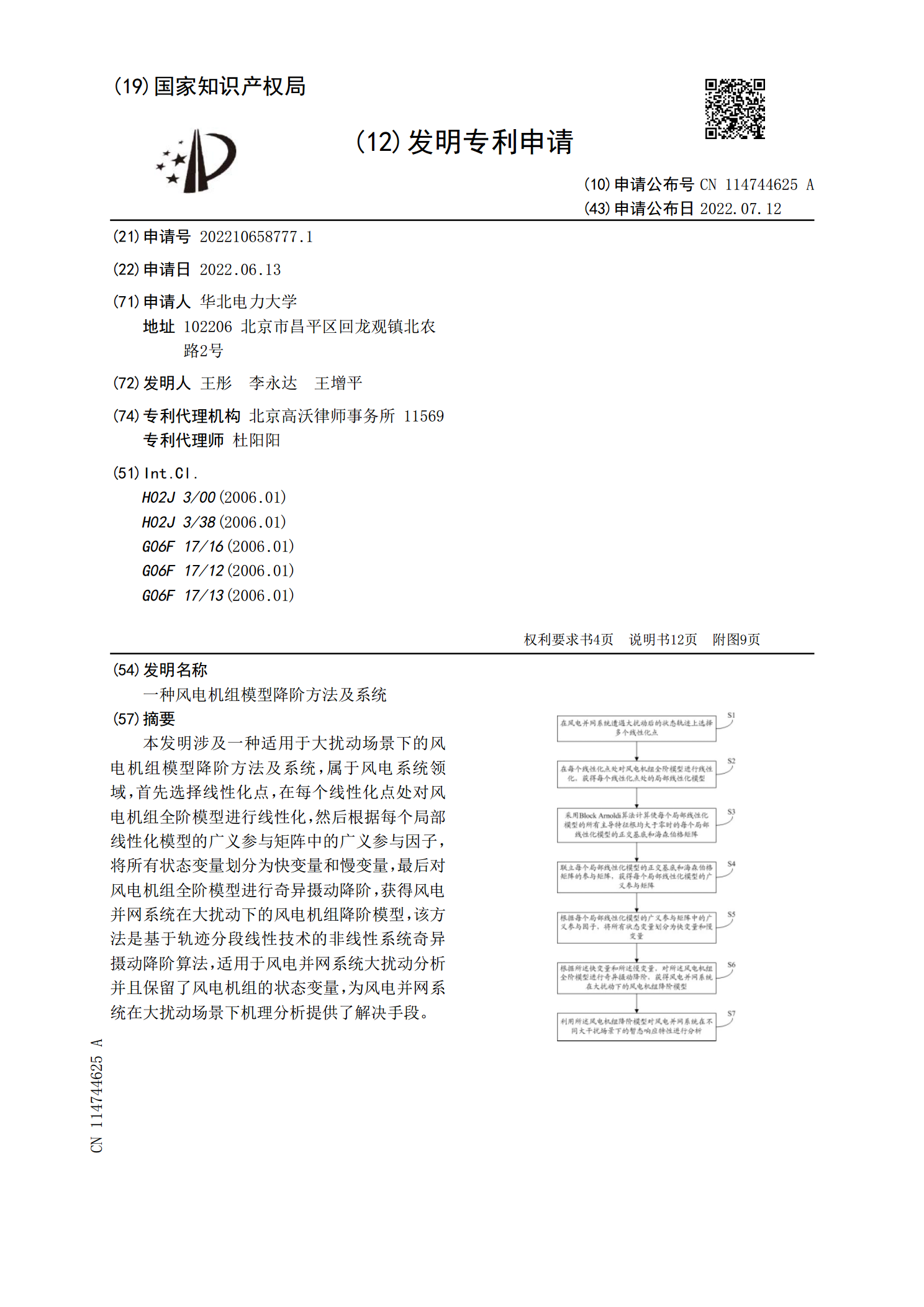
本发明涉及一种适用于大扰动场景下的风电机组模型降阶方法及系统,属于风电系统领域,首先选择线性化点,在每个线性化点处对风电机组全阶模型进行线性化,然后根据每个局部线性化模型的广义参与矩阵中的广义参与因子,将所有状态变量划分为快变量和慢变量,最后对风电机组全阶模型进行奇异摄动降阶,获得风电并网系统在大扰动下的风电机组降阶模型,该方法是基于轨迹分段线性技术的非线性系统奇异摄动降阶算法,适用于风电并网系统大扰动分析并且保留了风电机组的状态变量,为风电并网系统在大扰动场景下机理分析提供了解决手段。
一种双馈风电虚拟同步机转速恢复方法、装置及系统.pdf
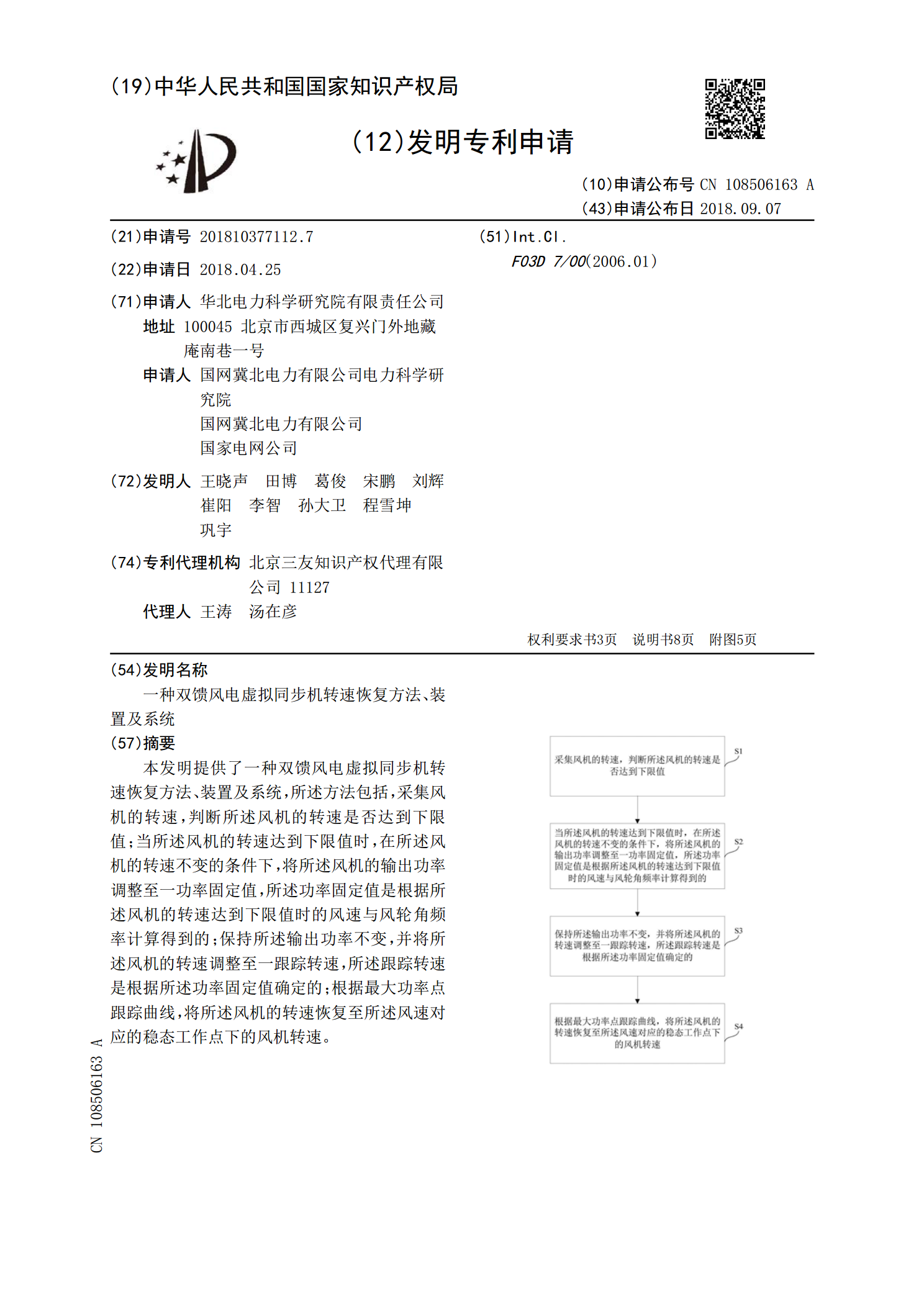
本发明提供了一种双馈风电虚拟同步机转速恢复方法、装置及系统,所述方法包括,采集风机的转速,判断所述风机的转速是否达到下限值;当所述风机的转速达到下限值时,在所述风机的转速不变的条件下,将所述风机的输出功率调整至一功率固定值,所述功率固定值是根据所述风机的转速达到下限值时的风速与风轮角频率计算得到的;保持所述输出功率不变,并将所述风机的转速调整至一跟踪转速,所述跟踪转速是根据所述功率固定值确定的;根据最大功率点跟踪曲线,将所述风机的转速恢复至所述风速对应的稳态工作点下的风机转速。

双馈风电机组变频器的FPGA仿真与控制的中期报告.docx
双馈风电机组变频器的FPGA仿真与控制的中期报告双馈风电机组变频器的FPGA仿真与控制的中期报告一、文献综述目前,双馈发电机组是国内外各大风电公司广泛使用的一种风力发电机组。它的优点是风能的利用效率高,维护简单等特点,因而在风力发电系统中广泛应用。双馈风电机组具有变频器的控制问题,在双馈风电机组变频器的控制系统中,变频器是整个系统中至关重要的部件,对于整个系统的工作稳定性有着非常重要的影响。目前,变频器控制系统一般采用数字信号处理器(DSP)或现场可编程门组合(FPGA)来解决。在这些方法中,FPGA采用