
菌落挑选仪自动标定方法.pdf

明钰****甜甜


1/10
2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

菌落挑选仪自动标定方法.pdf
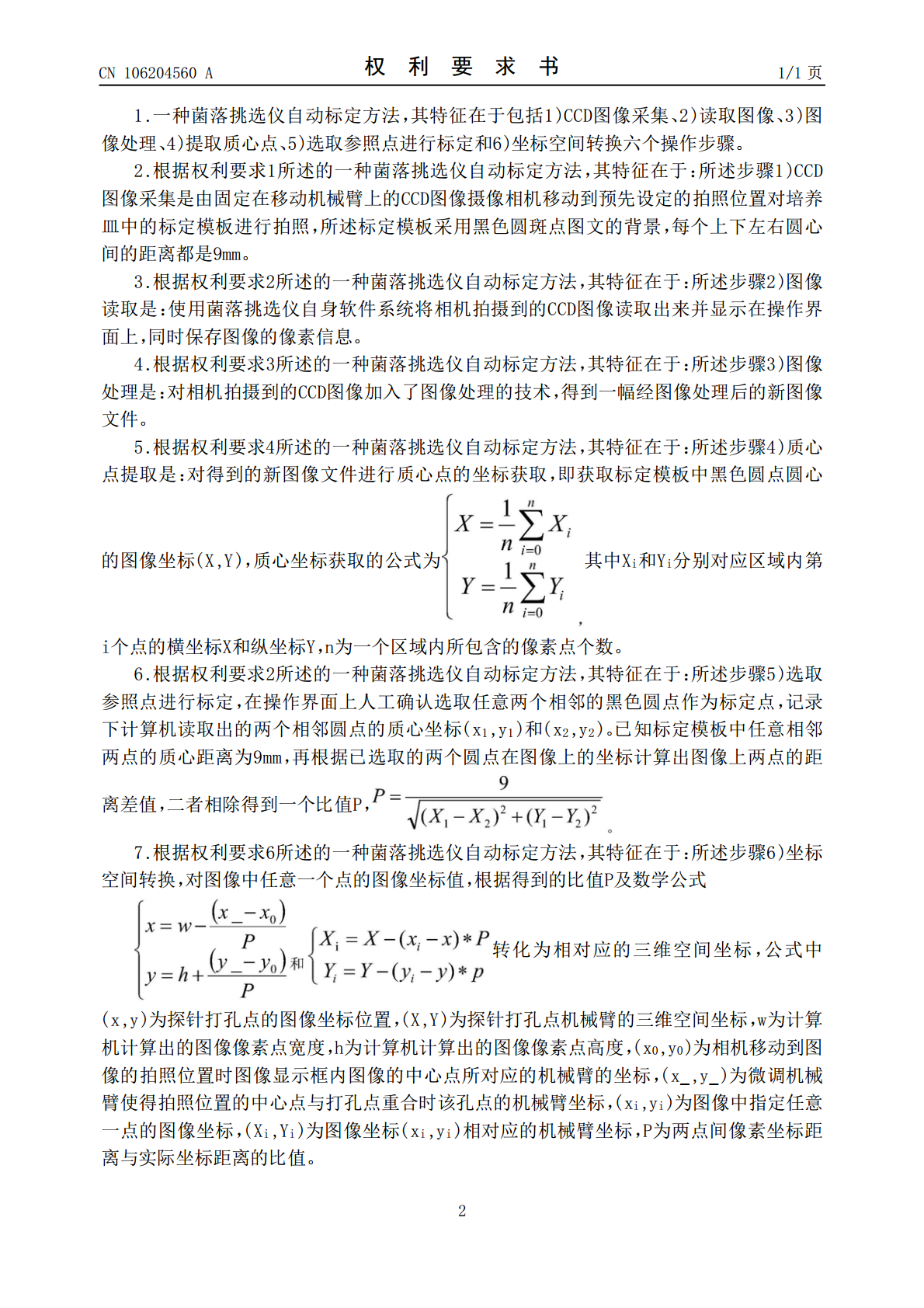
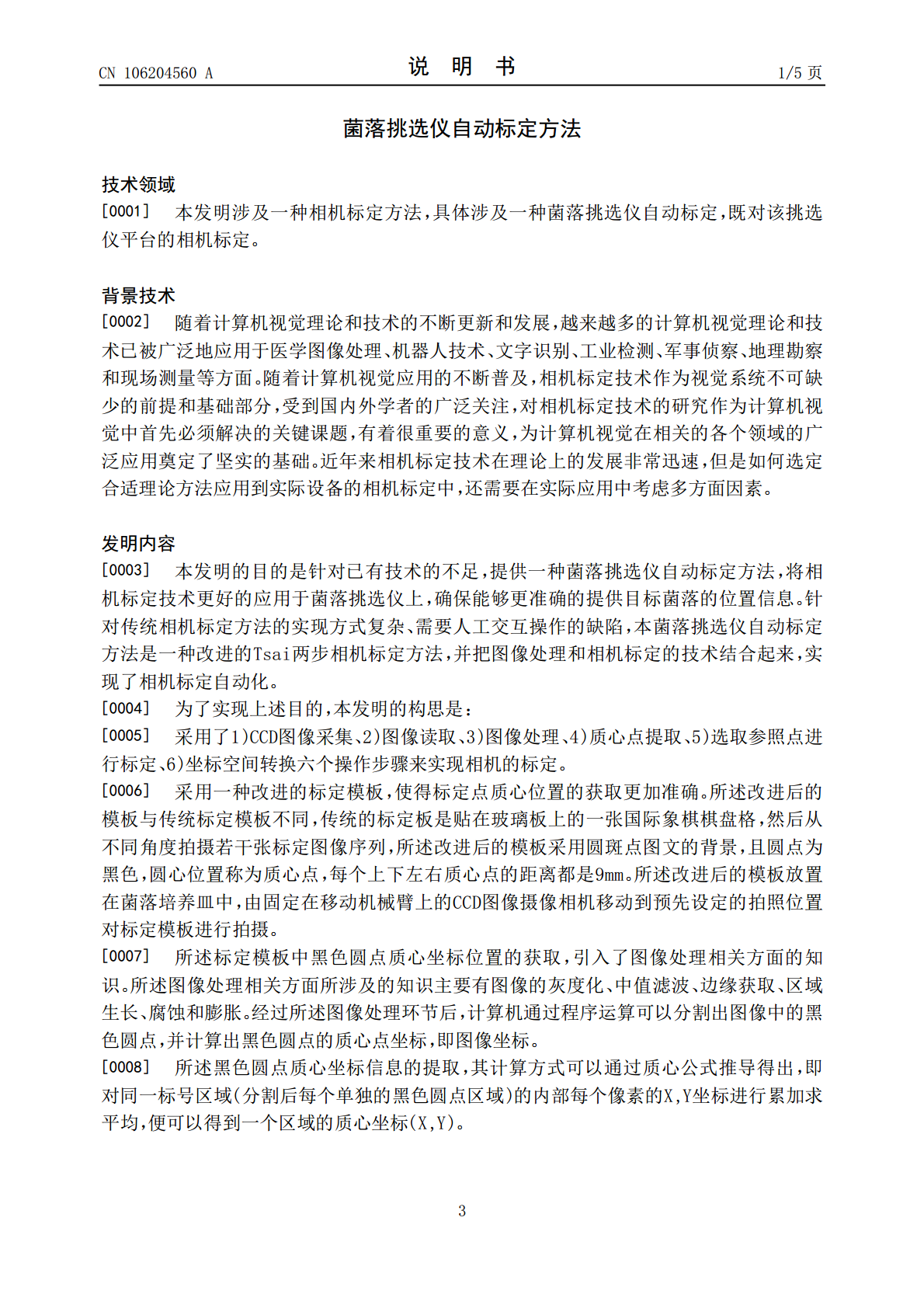
本发明涉及一种菌落挑选仪自动标定方法。本方法菌落挑选仪作为实验平台,建立一套适用于菌落挑选仪的相机标定系统,实现菌落图像坐标同三维空间坐标之间的转换。本发明方法在Tsai两步法的基础上,针对传统相机标定方法的实现方式复杂、需要人工交互操作缺陷,提出了一种改进的相机标定方法,把图像处理和相机标定的技术结合起来,实现了相机标定自动化。并且保留了Tsai两步法的迭代参数较少,求解速度快,精度高的优点。能够较好的应用于菌落挑选仪的相机标定系统,保证了菌落挑选仪能够精确读取目标菌落的三维空间坐标信息,并利用实验数据

基于蚁群算法的单克隆菌落挑选仪路径规划.docx
基于蚁群算法的单克隆菌落挑选仪路径规划单克隆菌落挑选仪是现代生物学和药物研发领域中不可缺少的分析工具。然而,对于大规模菌落筛选的任务,其操作效率仍存在待提高的问题。在此背景下,本文提出一种基于蚁群算法的单克隆菌落挑选仪路径规划方法,以提高操作效率及节省时间和成本。蚁群算法是一种仿生智能算法,模仿蚂蚁在觅食时的行为规律,通过各个蚂蚁之间的信息交流和合作,找到一条优秀的路径。在本文中,蚁群算法被应用于寻找单克隆菌落挑选仪的最优路径。首先,利用该算法模拟大量的蚂蚁在一个迷宫中寻找出口的过程。在每一步中,每只蚂蚁
一种伽马仪自动标定装置及标定方法.pdf
本发明涉及测井技术领域。目的在于提供一种自动化程度高、工作效率高、准确性强、人体危害小的伽马仪自动标定装置及标定方法。本发明所采用的技术方案是:一种伽马仪自动标定装置,包括两个轨道支撑架和一个仪器支撑架,两个轨道支撑架之间设置导轨,并在导轨上适配有用于悬挂标准源的滑动平台。导轨的两端分别设置有一个同步齿轮,同步齿轮通过轴承连接在导轨上。两个同步齿轮通过同步带联动,且滑动平台通过连接夹与同步带连接。同步齿轮中的一个由驱动机构驱动。本发明自动化程度高、工作效率高、准确性强、人体危害小。

VS型垂直摆倾斜仪标定自动计算方法.docx
VS型垂直摆倾斜仪标定自动计算方法标题:VS型垂直摆倾斜仪标定自动计算方法摘要:垂直摆倾斜仪具有在土木工程、航空航天、测绘以及工业制造等领域中广泛应用的重要性。正确标定垂直摆倾斜仪的精确度对于保证测量结果的准确性和可靠性具有关键意义。本文针对VS型垂直摆倾斜仪,通过自动计算方法进行标定,即通过利用计算机软件实现标定过程的自动化,既提高了标定过程的效率,又降低了人为操作的影响。本文主要介绍了VS型垂直摆倾斜仪的原理、标定流程及自动计算方法,并对该方法的精度和可靠性进行了评估。关键词:垂直摆倾斜仪;标定;自动

自动菌落计数仪在乳品检测中的应用研究.pptx
汇报人:/目录0102工作原理技术特点适用范围03乳品安全标准乳品中微生物的种类和危害乳品检测的常规方法04应用范围检测流程优势与局限性05实验准备实验过程结果分析06技术创新方向应用前景展望对乳品检测行业的影响汇报人: