
一种基于深度卷积神经网络的小目标快速检测方法.pdf

雨巷****莺莺


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于深度卷积神经网络的小目标快速检测方法.pdf
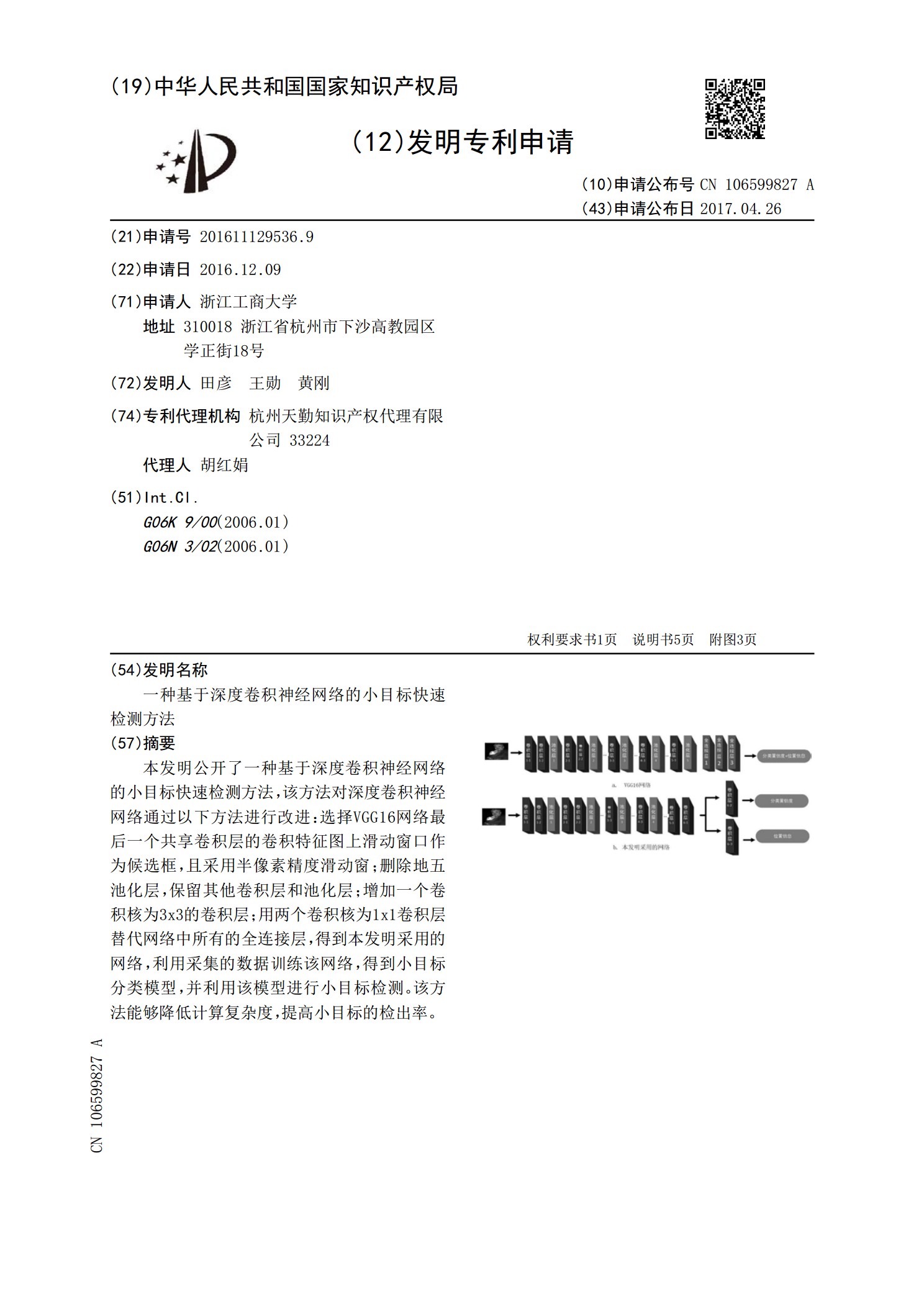
本发明公开了一种基于深度卷积神经网络的小目标快速检测方法,该方法对深度卷积神经网络通过以下方法进行改进:选择VGG16网络最后一个共享卷积层的卷积特征图上滑动窗口作为候选框,且采用半像素精度滑动窗;删除地五池化层,保留其他卷积层和池化层;增加一个卷积核为3x3的卷积层;用两个卷积核为1x1卷积层替代网络中所有的全连接层,得到本发明采用的网络,利用采集的数据训练该网络,得到小目标分类模型,并利用该模型进行小目标检测。该方法能够降低计算复杂度,提高小目标的检出率。

基于深度卷积神经网络的小目标检测的开题报告.docx
基于深度卷积神经网络的小目标检测的开题报告一、选题背景随着计算机视觉技术的不断发展,图像识别、目标检测等应用场景也越来越广泛。在目标检测领域中,针对大目标的检测已经相对成熟,但是对于小目标的检测仍面临一些挑战。首先,小目标存在尺寸小、像素稀疏、多样性等问题,使得传统的目标检测算法难以准确地识别;其次,由于小目标在图像中占用的比例较少,存在极端类别不平衡的问题,这也会影响模型的泛化能力。因此,如何有效地检测小目标是当前的研究热点之一。目前,使用卷积神经网络(ConvolutionalNeuralNetwor

一种基于深度级联卷积神经网络的快速人脸检测方法.pdf
本发明公开的是一种基于深度级联卷积神经网络的快速人脸检测方法,包括创建人脸数据集、组建深度级联卷积神经网络、测试网络模型,使用正负样本组成训练集和验证集,以训练所述深度级联卷积神经网络进行深度学习,在所述深度学习过程中加入性别分类辅助任务,同时采取微调训练;同时对训练方法和网络结构进行优化;本发明基于深度级联卷积神经网络,通过对卷积层的优化改进增加网络深度,并且改进级联网络的级联方式,从而大大降低了网络的计算量,提高了检测速度,同时引入辅助任务训练和微调训练阶段的在线难负样本挖掘方法,提高了网络的分类准确
基于卷积神经网络的目标检测方法.pdf
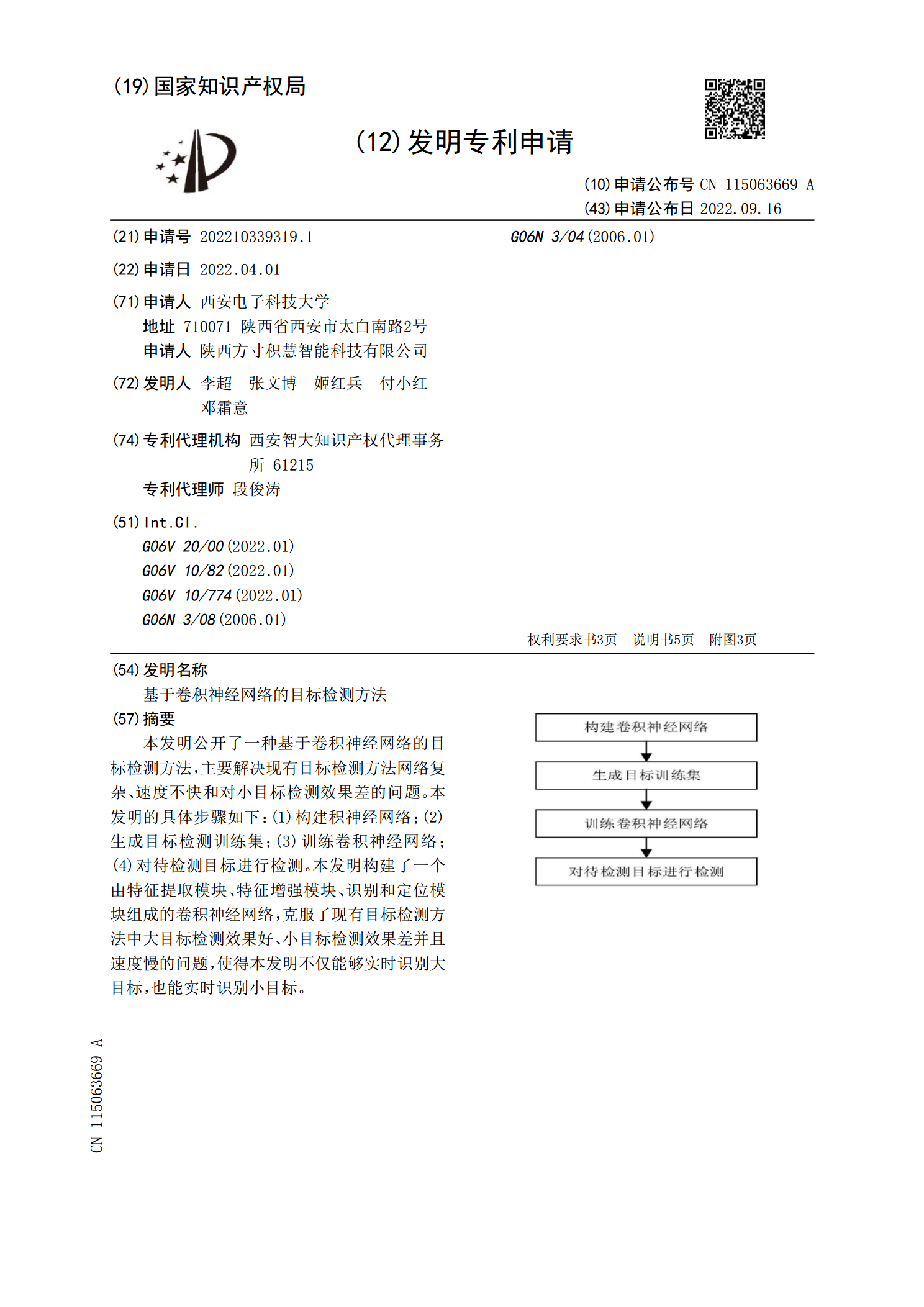
本发明公开了一种基于卷积神经网络的目标检测方法,主要解决现有目标检测方法网络复杂、速度不快和对小目标检测效果差的问题。本发明的具体步骤如下:(1)构建积神经网络;(2)生成目标检测训练集;(3)训练卷积神经网络;(4)对待检测目标进行检测。本发明构建了一个由特征提取模块、特征增强模块、识别和定位模块组成的卷积神经网络,克服了现有目标检测方法中大目标检测效果好、小目标检测效果差并且速度慢的问题,使得本发明不仅能够实时识别大目标,也能实时识别小目标。

一种基于深度帧差卷积神经网络的运动目标检测方法.pdf
本发明公开了一种基于深度帧差卷积神经网络的运动目标检测方法,属于计算机视觉领域,一种基于深度帧差卷积神经网络的运动目标检测方法,本发明的DifferenceNet具有孪生Encoder‑Decoder结构,通过输入两帧图像与对应的监督标签,可以学习两帧图像之间的时序信息与差异特征;AppearanceNet具有Encoder‑Decoder结构,通过主干提取t帧图像的表观信息,然后通过时‑空信息融合,对t+1帧图像中的运动目标进行预测;AppearanceNet还通过多尺度特征图融合和逐步上采样来保留多尺