
一种图像自动坏点校正装置及方法.pdf

是笛****加盟

1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种图像自动坏点校正装置及方法.pdf
本发明公开了一种图像自动坏点校正装置及方法,该方法包括:以当前像素为中心的邻域进行计算,分别在四个方向对当前位置的像素值进行插值估计,得到四个方向的插值估计值;分别在四个方向计算其方向权值;计算当前像素点为坏点的概率;根据计算得到的四个方向的插值估计值以及四个方向的方向权值,拟合得到当前像素的估计值;根据计算得到的坏点概率、当前像素估计值以及当前像素值,计算得到当前像素校正值,本发明能有效的检测及校正坏点,同时较好地保留图像的边缘及细节。
一种图像传感器坏点检测校正装置及方法.pdf
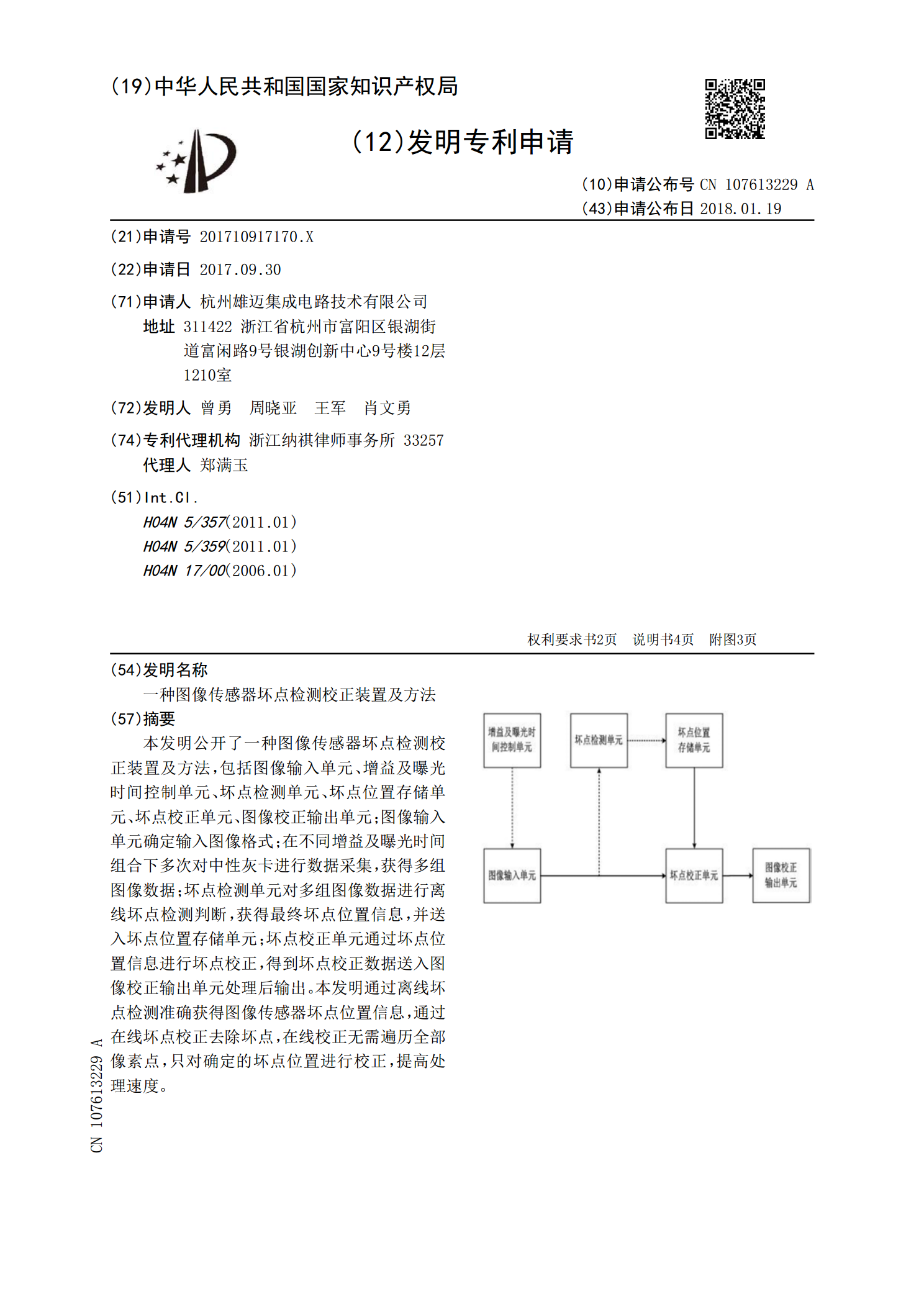
本发明公开了一种图像传感器坏点检测校正装置及方法,包括图像输入单元、增益及曝光时间控制单元、坏点检测单元、坏点位置存储单元、坏点校正单元、图像校正输出单元;图像输入单元确定输入图像格式;在不同增益及曝光时间组合下多次对中性灰卡进行数据采集,获得多组图像数据;坏点检测单元对多组图像数据进行离线坏点检测判断,获得最终坏点位置信息,并送入坏点位置存储单元;坏点校正单元通过坏点位置信息进行坏点校正,得到坏点校正数据送入图像校正输出单元处理后输出。本发明通过离线坏点检测准确获得图像传感器坏点位置信息,通过在线坏点校

一种轨道图像自动校正方法.pdf
本发明公开了一种轨道图像自动校正方法。将标定板置于轨检小车前端。标定板是一块标准矩形的平面板,平面板上的中心为一个白色矩形,除此白色区域外均为黑色,在标定板后放置一个相机,相机与轨面成角度θ,对轨道进行拍摄,确保标定板在所拍摄的图像中。从拍摄图像中截取标定板中心区域(含完整白色矩形区域),对截取图像进行轮廓提取,对轮廓进行直线检测得到四条直线,求得四个直线交点坐标,然后,可求得四个交点在原图像中的坐标,通过这四个交点坐标求取校正矩阵,将校正矩阵应用在原图像上,即可实现轨道图像的自动校正。

一种投影图像校正的方法及装置.pdf
本发明公开了一种投影图像校正的方法,包括步骤:S1,获取矩形四个顶点坐标、投影倾斜角和投影距离;S2,根据倾斜角对坐标畸变;S3,从不规则四边形中选取最大矩形;S4,对矩形进行坐标反变换;以及一种投影图像校正的装置,包括:测量模块,用于获取矩形四个顶点坐标、投影倾斜角和投影距;计算模块,用于根据倾斜角对坐标畸变,并对最大矩形进行坐标反变换。本发明利用投影的光学模型以及几何图形的特点,将投影倾斜角度转换成对应的坐标变换,从而实现图像畸变,克服了现有技术中存在的无法很好校正水平梯形的问题,实现了投影图像的垂直
一种图像校正方法、系统以及图像处理装置.pdf
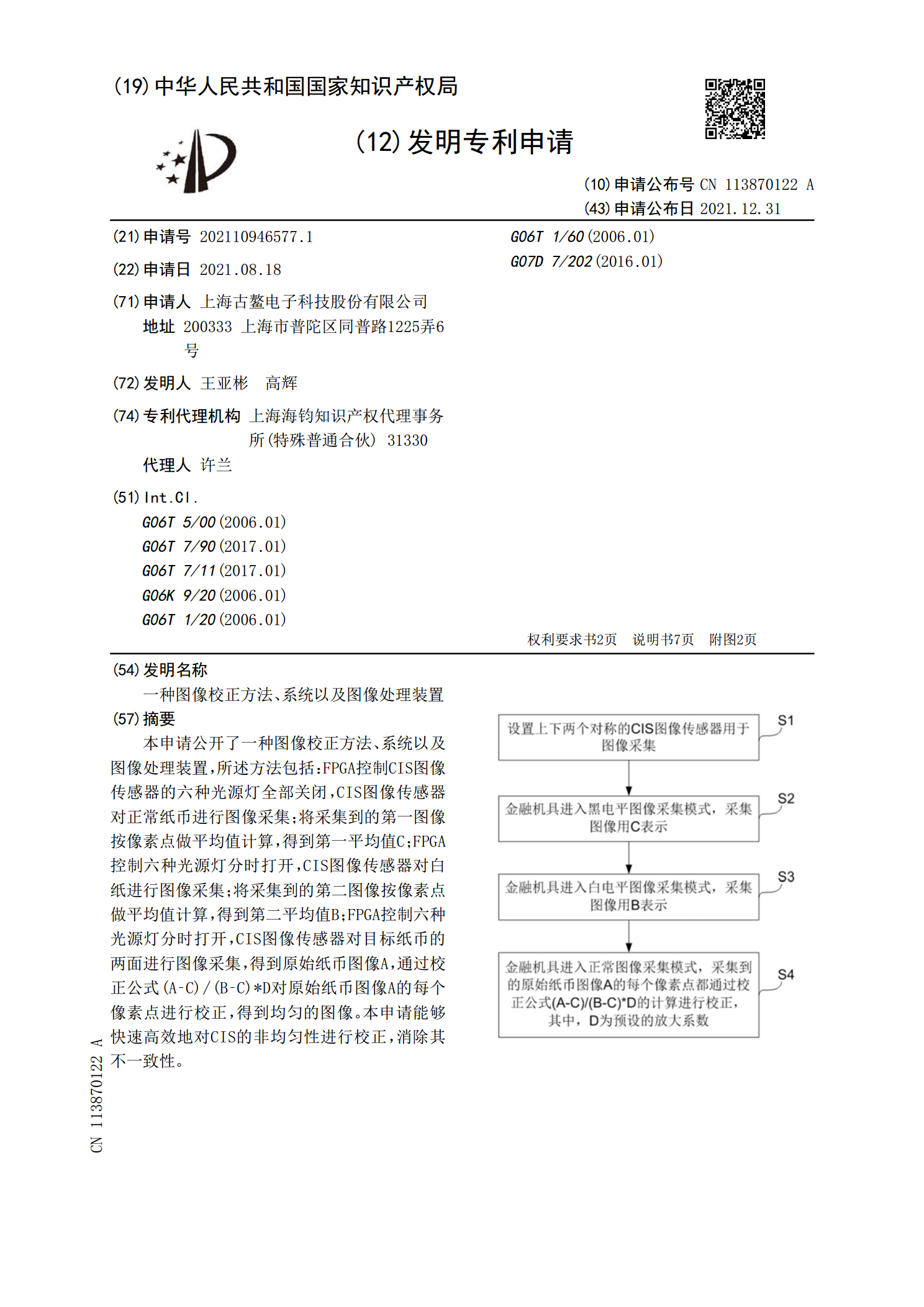
本申请公开了一种图像校正方法、系统以及图像处理装置,所述方法包括:FPGA控制CIS图像传感器的六种光源灯全部关闭,CIS图像传感器对正常纸币进行图像采集;将采集到的第一图像按像素点做平均值计算,得到第一平均值C;FPGA控制六种光源灯分时打开,CIS图像传感器对白纸进行图像采集;将采集到的第二图像按像素点做平均值计算,得到第二平均值B;FPGA控制六种光源灯分时打开,CIS图像传感器对目标纸币的两面进行图像采集,得到原始纸币图像A,通过校正公式(A‑C)/(B‑C)*D对原始纸币图像A的每个像素点进行校