
一种光场相机的合成孔径去遮挡方法.pdf

瀚玥****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种光场相机的合成孔径去遮挡方法.pdf
本发明公开了一种光场相机的合成孔径去遮挡方法,包括:根据输入的光场信息,得到所有子孔径图像;检测所有子孔径图像的特征点;在中心视角图像上选择一块区域,保留所选区域内的特征点,舍弃所选区域外的特征点,其中所选区域内包含有遮挡物和被遮挡的目标平面上的物体;对前一步骤得到的特征点和其余视角图像的特征点进行匹配,筛选得到特征点对;通过筛选出的特征点对来计算中心视角图像和其余视角图像的单映性变换矩阵;通过单映性变换矩阵对其余视角图像进行映射;对所有映射后的子孔径图像取平均,得到最终的子孔径合成图像。本发明能够去除镜

基于微透镜阵列合成孔径的光场相机去遮挡系统和方法.pdf
本发明提供了基于微透镜阵列合成孔径的光场相机去遮挡系统和方法,采用微透镜阵列和合成孔径技术,提高了图像的角分辨率和光通量,通过目标场景内遮挡物进行数字对焦,对遮挡物的数据进行了高精度的识别和去除,实现了对目标场景中被遮挡物体的还原显现,从而提高了图像的信噪比和图像清晰度;在保证遮挡物识别高准确度的前提下,实现了提高目标图像的图像质量和系统的可靠性的功能。本发明提供了高对比度和高信噪比的去除遮挡物信息的三维场景信息光场图像,并可根据需要将该系统视频化进一步处理,通过三维测量进行数字化改造,在医疗检测信息化、

光场相机阵列遮挡目标成像与跟踪研究的开题报告.docx
光场相机阵列遮挡目标成像与跟踪研究的开题报告一、研究背景随着现代科技的不断发展,光学成像技术也在不断地发展和完善。传统的基于透镜的成像方式可以获得高质量的图像,但受限于物理学的尺寸限制,当成像物体的尺寸或距离较大时,透镜成像方式的成像分辨率会受到较大的限制。为了解决这种限制,光场相机应运而生。光场相机是一种基于微透镜阵列的成像系统。其采用微透镜阵列对光场进行采样,通过后续的数字信号处理,可以实现对三维物体的全息成像和后处理。与传统的相机不同,在同样成像条件下,光场相机采集到的图像包含更多的信息,可以实现后
一种光场相机重聚焦方法.pdf
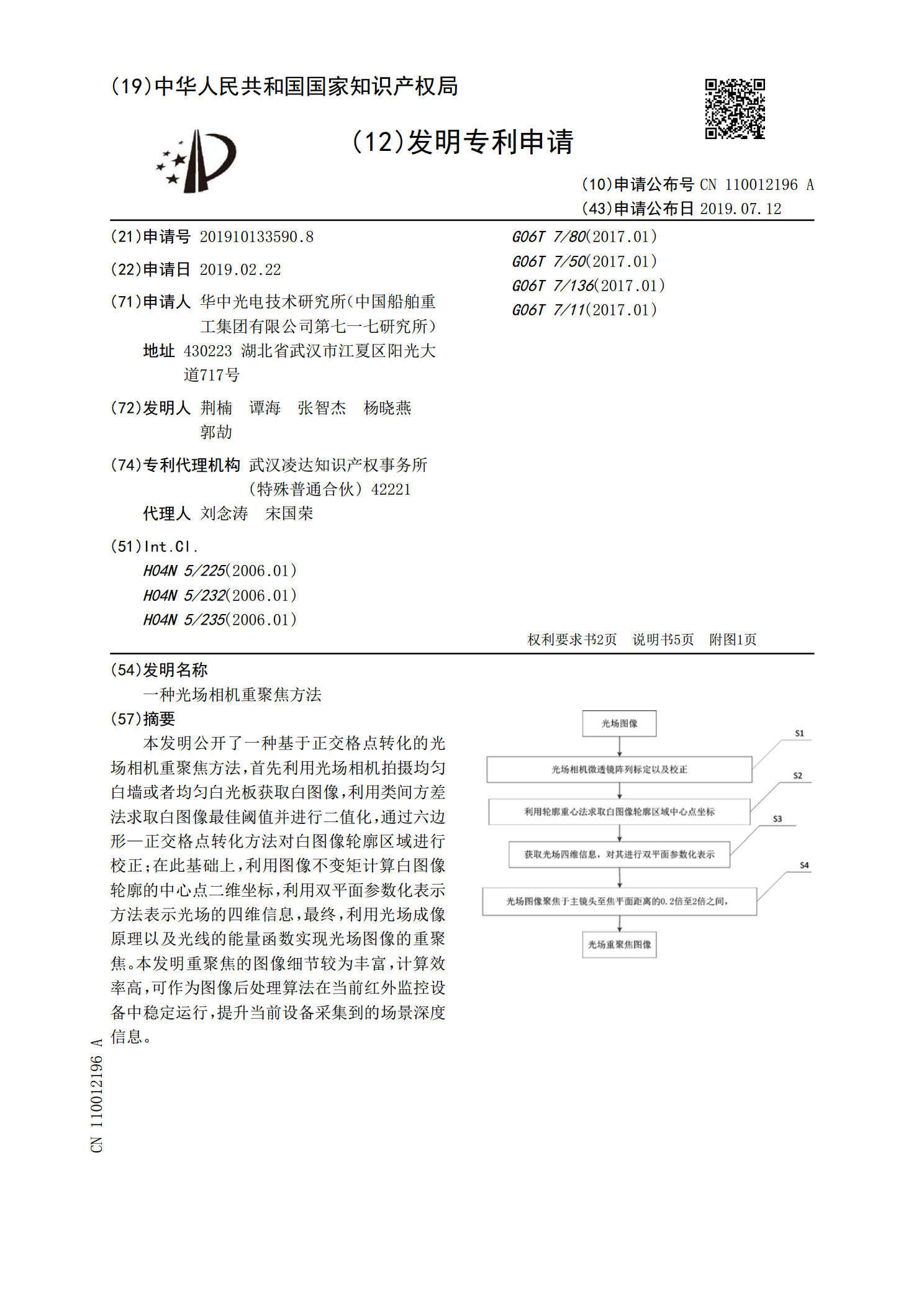
本发明公开了一种基于正交格点转化的光场相机重聚焦方法,首先利用光场相机拍摄均匀白墙或者均匀白光板获取白图像,利用类间方差法求取白图像最佳阈值并进行二值化,通过六边形—正交格点转化方法对白图像轮廓区域进行校正;在此基础上,利用图像不变矩计算白图像轮廓的中心点二维坐标,利用双平面参数化表示方法表示光场的四维信息,最终,利用光场成像原理以及光线的能量函数实现光场图像的重聚焦。本发明重聚焦的图像细节较为丰富,计算效率高,可作为图像后处理算法在当前红外监控设备中稳定运行,提升当前设备采集到的场景深度信息。

一种光场相机的盲标定方法.pdf
本发明公开了一种光场相机的盲标定方法,包括:在主透镜与传感器之间插入微透镜阵列以搭建初始的光场相机2.0结构,并分别测量主透镜和微透镜阵列分别与测量起始面的初始距离;固定传感器以及微透镜阵列的位置,向远离微透镜阵列的方向移动主透镜,并实时记录传感器采集的图像;测量依照光场相机1.0结构清晰成像时主透镜与测量起始面之间的距离;根据主透镜和微透镜阵列分别与测量起始面的初始距离、以及依照光场相机1.0结构清晰成像时主透镜与测量起始面之间的距离,建立光场相机2.0结构的盲标定模型,计算得到微透镜阵列的结构参数,并