
一种旋转相控阵雷达电子波束指向实时控制方法.pdf

玄静****写意


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种旋转相控阵雷达电子波束指向实时控制方法.pdf
本发明涉及一种旋转相控阵雷达电子波束指向实时控制方法,旋转相控阵雷达天线在方位上作机械360度旋转,电子波束能够在天线法向正负一定范围内和仰角一定范围内进行二维电描,恶劣天气以及平台摇摆时会造成天线机械旋转的转速不均匀,雷达任务执行时长与天线的波束驻留时长不匹配,经一段时间后,电子波束的指向与天线机械法向方位会相差过大,造成波束的不可达。本发明解决的方法是:通过计算上个调度时间内,所有电子波束执行时与天线机械法向方位的偏差的平均值,得出电子波束超前还是落后于天线机械法向方位,将此角度差换算成时间,将偏差时

一种基于双时间指针的实时相控阵雷达波束驻留调度方法.pdf
本发明属于雷达系统资源管理领域,特别涉及一种新型的相控阵雷达实时自适应驻留调度方法。本发明首先在调度间隔内设置分离点,在分离点左右两侧执行任务时分别采用基于时间指针的波束驻留调度方法,构成了基于双时间指针调度方式。随后,在综合优先级设计中,利用任务工作方式优先级分别与截止期或最早可执行时刻相结合构建一级综合优先级,再和期望执行时刻与实际执行时刻的偏差共同构建二级综合优先级。最终,在不同分离点情况下获得的波束驻留调度序列中,选择代价最小的任务调度序列作为最终调度结果。仿真结果表明,与现有方法相比,此方法兼顾

一种基于序贯处理的实时相控阵雷达波束驻留调度方法.pdf
本发明属于雷达系统资源管理领域,特别涉及一种基于序贯处理的实时相控阵雷达波束驻留调度方法。本发明首先利用基于时间指针的波束驻留调度算法获得实际执行任务集合、延迟任务集合和删除任务集合,在此基础上对实际执行任务集合进行序贯处理,调整其实际调度执行时刻,从而在保证调度优先级和截止期的同时兼顾了期望执行时间准则。在序贯处理中,本发明通过遍历实际执行任务的全部可能执行顺序,获得了在启发式规则下具有最低的时间偏移率的实际执行任务队列,其中引入分支界定的思想降低了计算复杂度,从而保证了本调度方法的实时性。

一种基于启发式回溯的实时相控阵雷达波束驻留调度方法.pdf
本发明属于雷达系统资源管理领域,特别涉及一种新型的相控阵雷达实时自适应驻留调度方法。本发明首先通过时间指针确定了本调度间隔内实际执行任务队列、延迟任务队列和删除任务队列,保证了波束驻留调度中的重要性与紧迫性准则,随后本发明对实际执行任务队列中任务的实际执行时刻以启发式回溯方法进行调整,从而降低了各任务实际执行时刻与其期望执行时刻之间的偏移度,保证了波束驻留调度中的期望执行时间准则。此外,通过将实际执行任务队列进行分块后再进行回溯处理,本方法计算复杂度得以大幅度降低,本方法的实时性得以保证。
一种多面相控阵雷达通信定向波束组网方法.pdf
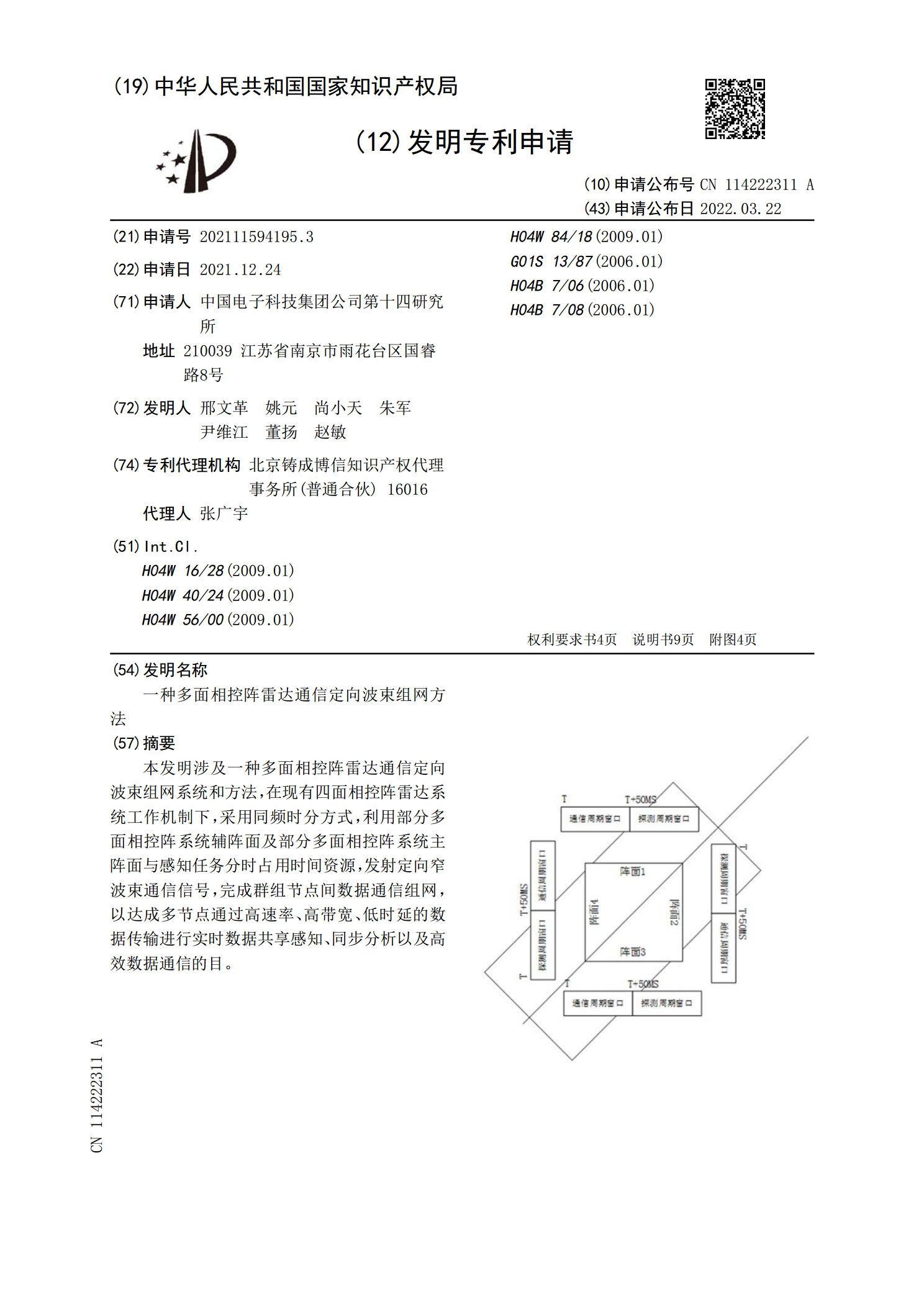
本发明涉及一种多面相控阵雷达通信定向波束组网系统和方法,在现有四面相控阵雷达系统工作机制下,采用同频时分方式,利用部分多面相控阵系统辅阵面及部分多面相控阵系统主阵面与感知任务分时占用时间资源,发射定向窄波束通信信号,完成群组节点间数据通信组网,以达成多节点通过高速率、高带宽、低时延的数据传输进行实时数据共享感知、同步分析以及高效数据通信的目。