
定位轨迹三角垂距抽稀方法.pdf

雨巷****碧易


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

定位轨迹三角垂距抽稀方法.pdf
本发明提供了一种定位轨迹三角垂距抽稀方法,其中设定阀值为D,并判断如下步骤包括:A.根据定位点顺序建立包括:首定位点,中间定位点,尾定位点的三角模并获取三角垂距d;判断三角垂距d与阈值D值大小;B.当d<D值时,首定位点不变,抽除中间定位点,并递进后顺序定位点重新确定中间定位点及尾定位点后;重复步骤A和B直到d>D值时,保留当前三角模的所有定位点,并设当前三角模的尾定位点为新首定位点并重复步骤A和B。从而实现能在较好保持原有定位轨迹一致性的情况下,对定位点进行合理抽稀,以稀释定位数据,便于该定位数据的传输

一种定位轨迹纠正抽稀的方法及系统.pdf
本发明属于路径检测领域,涉及到一种定位轨迹纠正抽稀的方法及系统。包括多个客户端与一服务端,还包括一第一过程:步骤A1,生成一位置数据集;步骤A2,预设时间长度的滑动窗口;步骤A3,判断当前的所述滑动窗口内的最后一个所述位置数据的时间节点和所述滑动窗口外的下一个所述位置数据的时间节点之间的时间间;步骤A4,判断位置信息;步骤A5,返回所述步骤A1,直至所述滑动窗口内的最后一个数据为所述位置数据集的最后一个数据时,将当前的所述位置数据集作为第一定位轨迹输出,随后结束。上述技术方案的有益效果是:提升位置数据的准

一种车辆轨迹抽稀方法及系统.pdf
本发明提供一种车辆轨迹抽稀方法及系统,涉及数据处理领域,其中,所述方法包括,获取车辆行驶的第一轨迹信息,所述第一轨迹信息包括多个轨迹点以及所述多个轨迹点的行驶方向;计算每一轨迹点的行驶方向与预设方向的夹角,获取第一轨迹点与第二轨迹点的夹角的第一变化量,所述第一轨迹点和所述第二轨迹点为相邻轨迹点,且在该车辆行驶的第一轨迹信息中,该车辆先经过第一轨迹点后经过第二轨迹点;将所述第一变化量与预设变化量进行比较,判断是否将所述第二轨迹点进行删除。上述方法删除了车辆行驶过程中类似直线运行的轨迹点信息,保留了特征轨迹点
曲线抽稀方法及装置.pdf
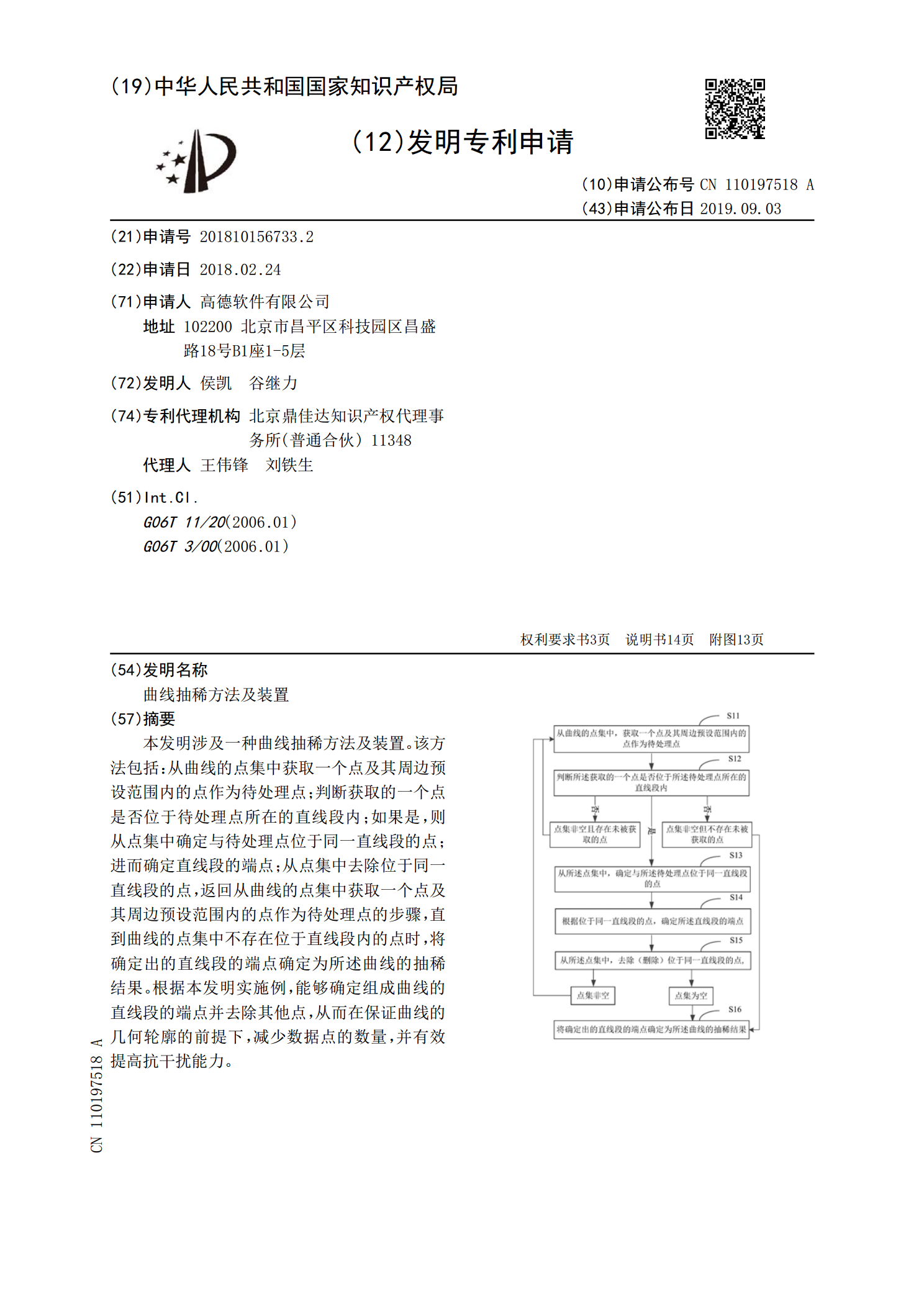
本发明涉及一种曲线抽稀方法及装置。该方法包括:从曲线的点集中获取一个点及其周边预设范围内的点作为待处理点;判断获取的一个点是否位于待处理点所在的直线段内;如果是,则从点集中确定与待处理点位于同一直线段的点;进而确定直线段的端点;从点集中去除位于同一直线段的点,返回从曲线的点集中获取一个点及其周边预设范围内的点作为待处理点的步骤,直到曲线的点集中不存在位于直线段内的点时,将确定出的直线段的端点确定为所述曲线的抽稀结果。根据本发明实施例,能够确定组成曲线的直线段的端点并去除其他点,从而在保证曲线的几何轮廓的前

解算点线垂距方法的改进.docx
解算点线垂距方法的改进标题:改进的点线垂距计算方法摘要:点线垂距是几何学中一项重要的计算方法,它被广泛应用于测量、建模和计算机图形学等领域。本论文旨在研究和探讨改进的点线垂距计算方法,通过分析传统的点线垂距计算方法存在的问题和局限性,提出了一种新的改进方法,并通过实验和比较验证了其有效性和准确性。关键词:点线垂距,计算方法,改进,几何学,测量,建模,计算机图形学1.引言点线垂距是指从给定的点到直线的最短距离。它在几何学中有着广泛的应用,如测量地图上某一点到道路的距离、计算建筑物的高度等。传统的点线垂距计算