
基于直线边缘特征的目标识别方法、系统.pdf

努力****冰心


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于直线边缘特征的目标识别方法、系统.pdf
本发明提供了一种基于直线边缘特征的目标识别方法,其特征在于,包括获取直线边缘步骤,所述获取直线边缘步骤包括如下步骤:步骤1:根据从摄像机获取到的图像,获取图像垂直边缘和水平边缘进行检测,获取第一直线边缘;步骤2:根据从摄像机获取到的图像,通过比较图像的连通域中的像素数量和预设像素数量,保留第二直线边缘;以及其他步骤。本发明提供的基于直线边缘特征的目标识别方法为了给后续的跟踪识别任务提供足够数量的边缘特征,本发明采用三种边缘检测方法同时进行检测边缘,然后进行融合,去掉重复部分,连接断裂边缘。
基于直线边缘特征的目标跟踪方法、系统.pdf
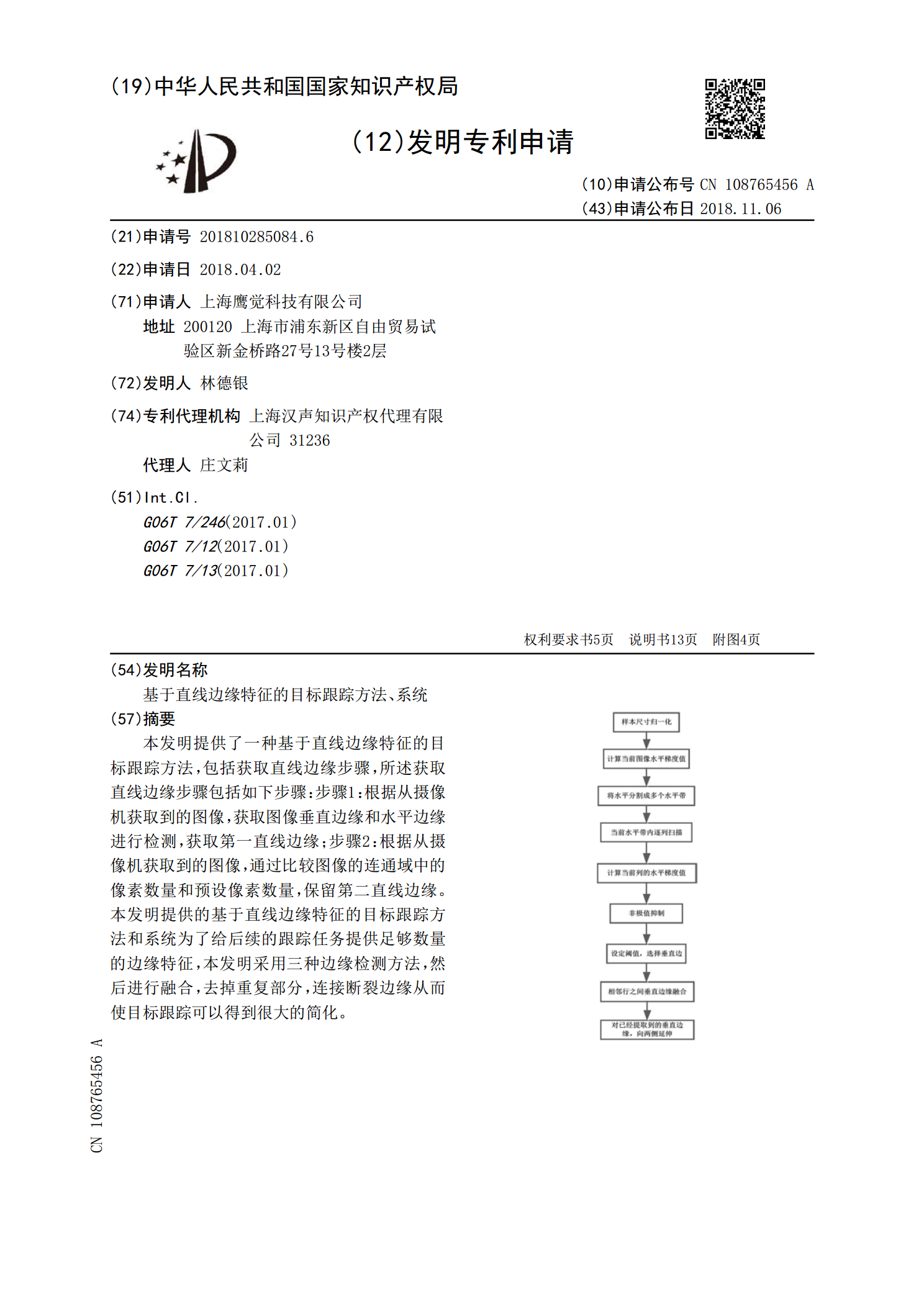
本发明提供了一种基于直线边缘特征的目标跟踪方法,包括获取直线边缘步骤,所述获取直线边缘步骤包括如下步骤:步骤1:根据从摄像机获取到的图像,获取图像垂直边缘和水平边缘进行检测,获取第一直线边缘;步骤2:根据从摄像机获取到的图像,通过比较图像的连通域中的像素数量和预设像素数量,保留第二直线边缘。本发明提供的基于直线边缘特征的目标跟踪方法和系统为了给后续的跟踪任务提供足够数量的边缘特征,本发明采用三种边缘检测方法,然后进行融合,去掉重复部分,连接断裂边缘从而使目标跟踪可以得到很大的简化。

基于改进梯度边缘特征的早期火焰识别方法.docx
基于改进梯度边缘特征的早期火焰识别方法基于改进梯度边缘特征的早期火焰识别方法摘要:火灾是一种常见而严重的灾害事件,准确快速的火焰识别对于防范火灾风险和保障人们的安全至关重要。本论文提出了一种基于改进梯度边缘特征的早期火焰识别方法。首先,通过图像处理技术对火焰图像进行预处理,包括灰度化、高斯滤波和边缘检测等。然后,提取改进梯度边缘特征,结合梯度直方图和边缘直方图来描述火焰的形态和纹理信息。最后,利用支持向量机(SVM)对特征向量进行分类和判别,实现对火焰的识别和预警。实验证明,该方法在火焰识别准确性和实时性

一种基于时频域特征的雷达目标识别方法及系统.pdf
本发明公开了一种基于时频域特征的雷达目标识别方法及系统,包括:计算并获取目标的特征信息;根据判定准则对所述特征信息进行目标识别,判定目标是真实目标还是干扰,并给出识别结果。本发明系统包括:特征计算模块和判决识别模块。特征计算模块对时频域聚类得到的目标计算得到构成点数、多普勒维长度、距离维长度、稀疏度和聚集度特征,并输出给判决识别模块;判决识别模块根据判定准则,根据特征进行目标识别,判定各目标是真实目标还是干扰或是疑似目标,并给出识别结果。实现简单,应用广泛,既能用于弹载雷达的目标识别,也能用于地面、机载雷
基于卷积神经网络融合特征的雷达目标识别方法及系统.pdf
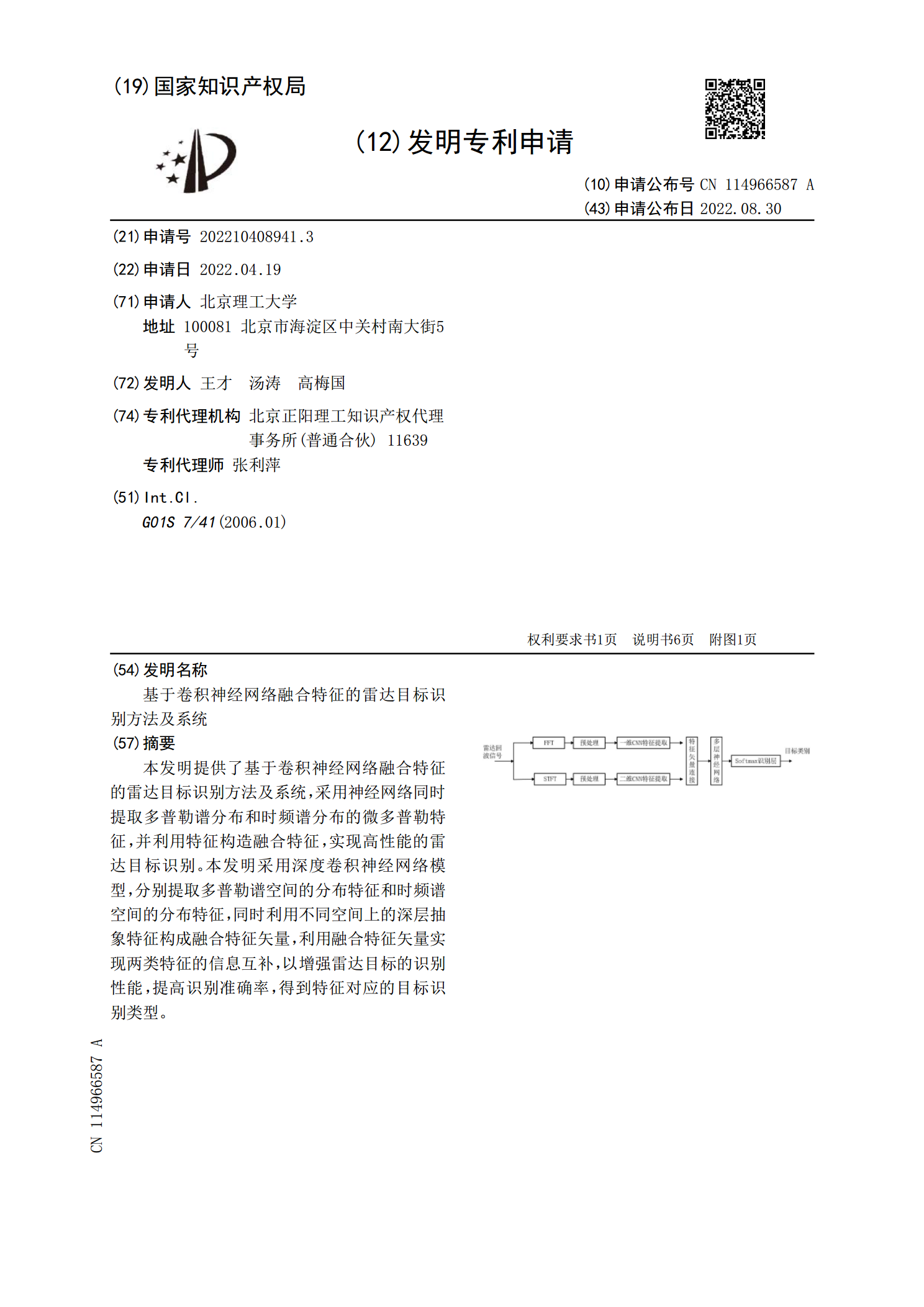
本发明提供了基于卷积神经网络融合特征的雷达目标识别方法及系统,采用神经网络同时提取多普勒谱分布和时频谱分布的微多普勒特征,并利用特征构造融合特征,实现高性能的雷达目标识别。本发明采用深度卷积神经网络模型,分别提取多普勒谱空间的分布特征和时频谱空间的分布特征,同时利用不同空间上的深层抽象特征构成融合特征矢量,利用融合特征矢量实现两类特征的信息互补,以增强雷达目标的识别性能,提高识别准确率,得到特征对应的目标识别类型。