
视频编码系统中的帧间预测方法和装置.pdf

玉军****la


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共36页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
视频编码系统中的帧间预测方法和装置.pdf
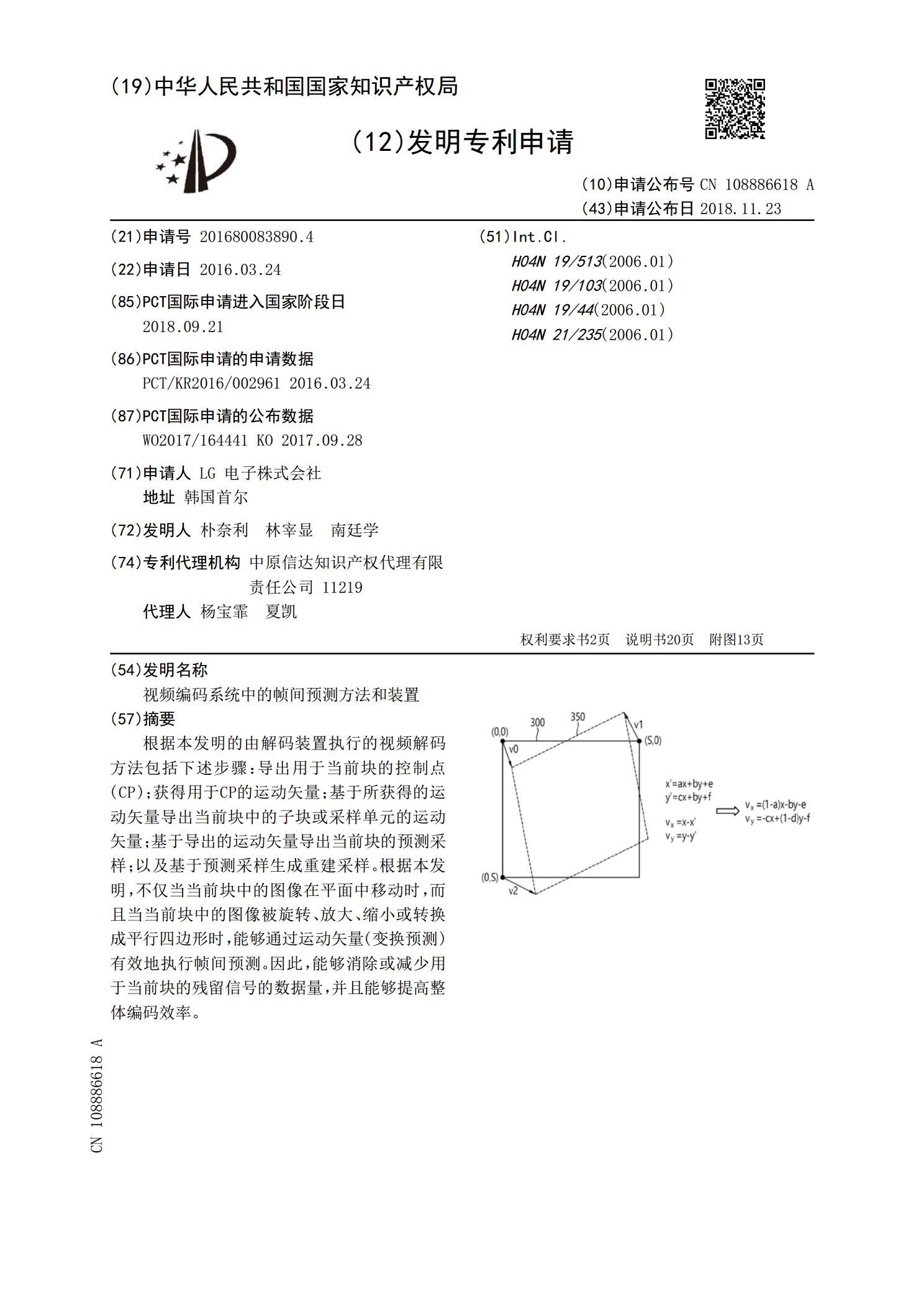
根据本发明的由解码装置执行的视频解码方法包括下述步骤:导出用于当前块的控制点(CP);获得用于CP的运动矢量;基于所获得的运动矢量导出当前块中的子块或采样单元的运动矢量;基于导出的运动矢量导出当前块的预测采样;以及基于预测采样生成重建采样。根据本发明,不仅当当前块中的图像在平面中移动时,而且当当前块中的图像被旋转、放大、缩小或转换成平行四边形时,能够通过运动矢量(变换预测)有效地执行帧间预测。因此,能够消除或减少用于当前块的残留信号的数据量,并且能够提高整体编码效率。
用于利用帧间预测来编码和解码视频的方法和装置.pdf
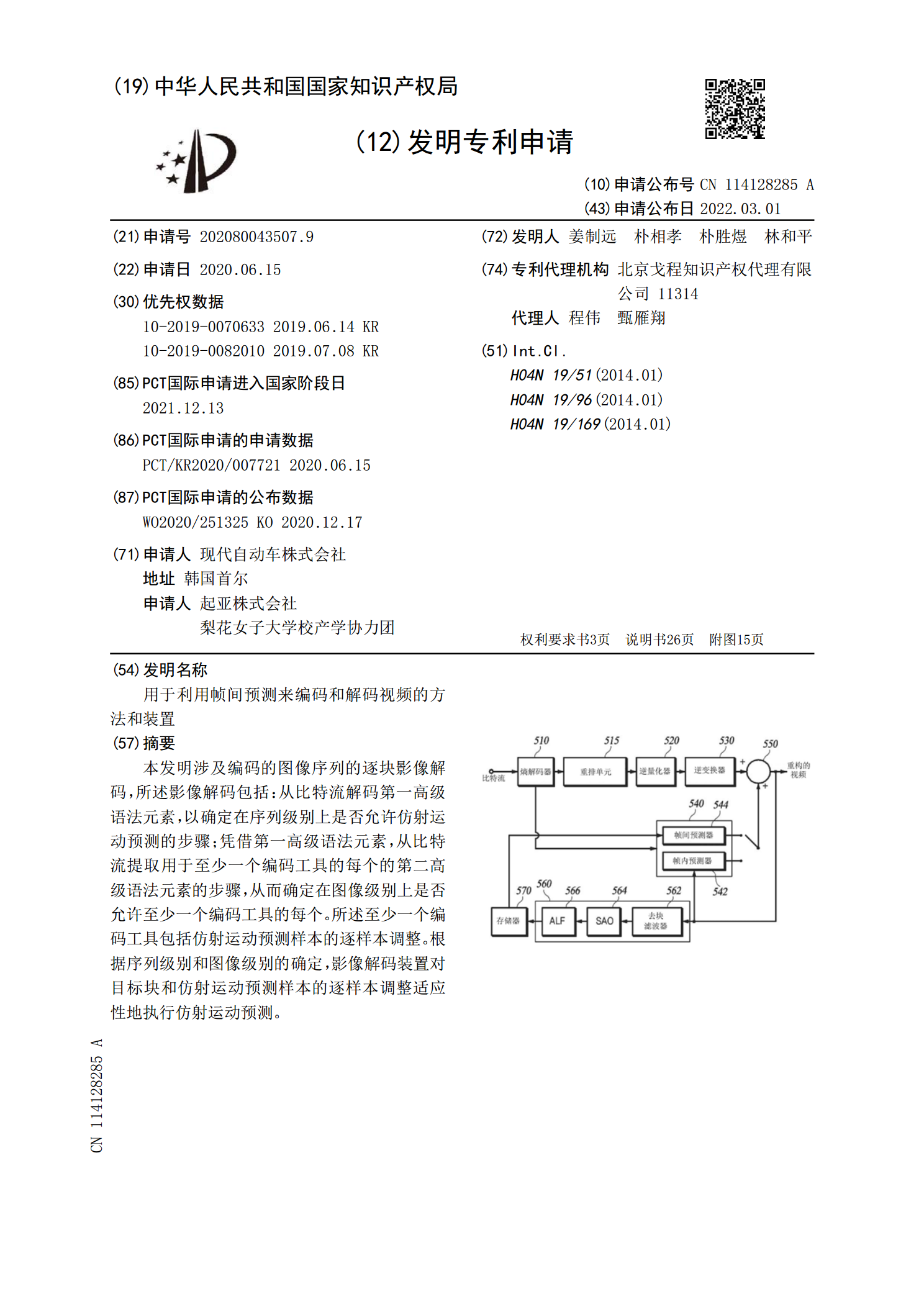
本发明涉及编码的图像序列的逐块影像解码,所述影像解码包括:从比特流解码第一高级语法元素,以确定在序列级别上是否允许仿射运动预测的步骤;凭借第一高级语法元素,从比特流提取用于至少一个编码工具的每个的第二高级语法元素的步骤,从而确定在图像级别上是否允许至少一个编码工具的每个。所述至少一个编码工具包括仿射运动预测样本的逐样本调整。根据序列级别和图像级别的确定,影像解码装置对目标块和仿射运动预测样本的逐样本调整适应性地执行仿射运动预测。
一种帧间预测方法、视频编码方法及装置.pdf
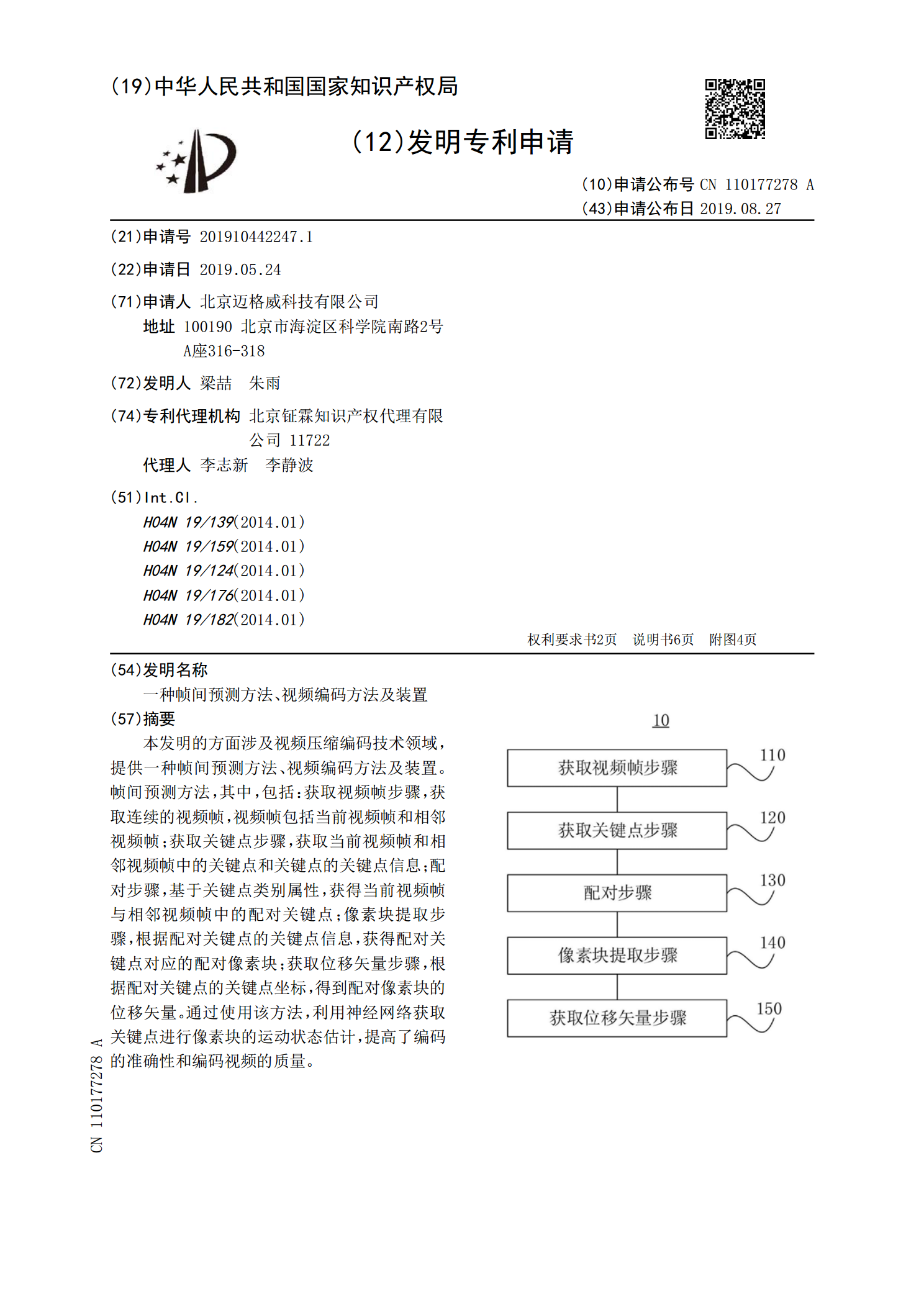
本发明的方面涉及视频压缩编码技术领域,提供一种帧间预测方法、视频编码方法及装置。帧间预测方法,其中,包括:获取视频帧步骤,获取连续的视频帧,视频帧包括当前视频帧和相邻视频帧;获取关键点步骤,获取当前视频帧和相邻视频帧中的关键点和关键点的关键点信息;配对步骤,基于关键点类别属性,获得当前视频帧与相邻视频帧中的配对关键点;像素块提取步骤,根据配对关键点的关键点信息,获得配对关键点对应的配对像素块;获取位移矢量步骤,根据配对关键点的关键点坐标,得到配对像素块的位移矢量。通过使用该方法,利用神经网络获取关键点进行

视频编码中变换和帧间预测算法研究与改进.docx
视频编码中变换和帧间预测算法研究与改进随着数字视频技术的不断发展,视频编码技术作为其中的一项重要技术逐步成熟,并成为数字视频传输和存储的关键技术之一。在视频编码中,变换和帧间预测是其中重要的两个环节,能够有效提高视频编码的压缩率,进而提高视频传输和存储的效率。本文将就视频编码中的变换和帧间预测算法进行研究和改进探讨。1.变换算法的研究和改进在视频编码中,变换算法是其中重要的一环,能够有效提高视频信号的压缩率和抗误能力。在目前的视频编码标准中,DCT和变换都是常用的变换算法。但是现有的变换算法还有一些问题存

视频编码帧选择方法及装置.pdf
本发明实施例提供一种视频编码帧选择方法及装置,所述方法包括:确定长期参考帧;针对任一帧图像帧,计算与所述长期参考帧的图像差异值;在所述图像差异值小于预设值时,确定所述任一帧图像帧作为B帧进行编码;在所述图像差异值大于所述预设值时,确定所述任一帧图像帧作为P帧进行编码。本发明实施例节省了码流,避免了资源浪费。