
滤波磁编码器设计简述.docx

是你****盟主


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

滤波磁编码器设计简述.docx
滤波磁编码器设计简述作者:吴正平王璐单位:三峡大学理学院A/D转换器及控制电路A/D转换器将传感器输出的两路模拟信号转变为数字信号A/D采样器的精度直接决定信号处理部分的解码精度而A/D采样器的采样速度则决定磁栅转一圈最大能输出的脉冲数.经过选型最终确定的A/D转换器是AD9226芯片.AD9226芯片是具有12位精度、65Msps的高速模数转换器实验证明该芯片完全可以满足编码器设计要求.对AD9226的控制是通过FPGA芯片实现的通过对40MHz时钟
滤波磁编码器设计简述.docx
滤波磁编码器设计简述作者:吴正平王璐单位:三峡大学理学院A/D转换器及控制电路A/D转换器将传感器输出的两路模拟信号转变为数字信号A/D采样器的精度直接决定信号处理部分的解码精度而A/D采样器的采样速度则决定磁栅转一圈最大能输出的脉冲数.经过选型最终确定的A/D转换器是AD9226芯片.AD9226芯片是具有12位精度、65Msps的高速模数转换器实验证明该芯片完全可以满足编码器设计要求.对AD9226的控制是通过FPGA芯片实现的通过对40MHz时钟
磁编码器.pdf
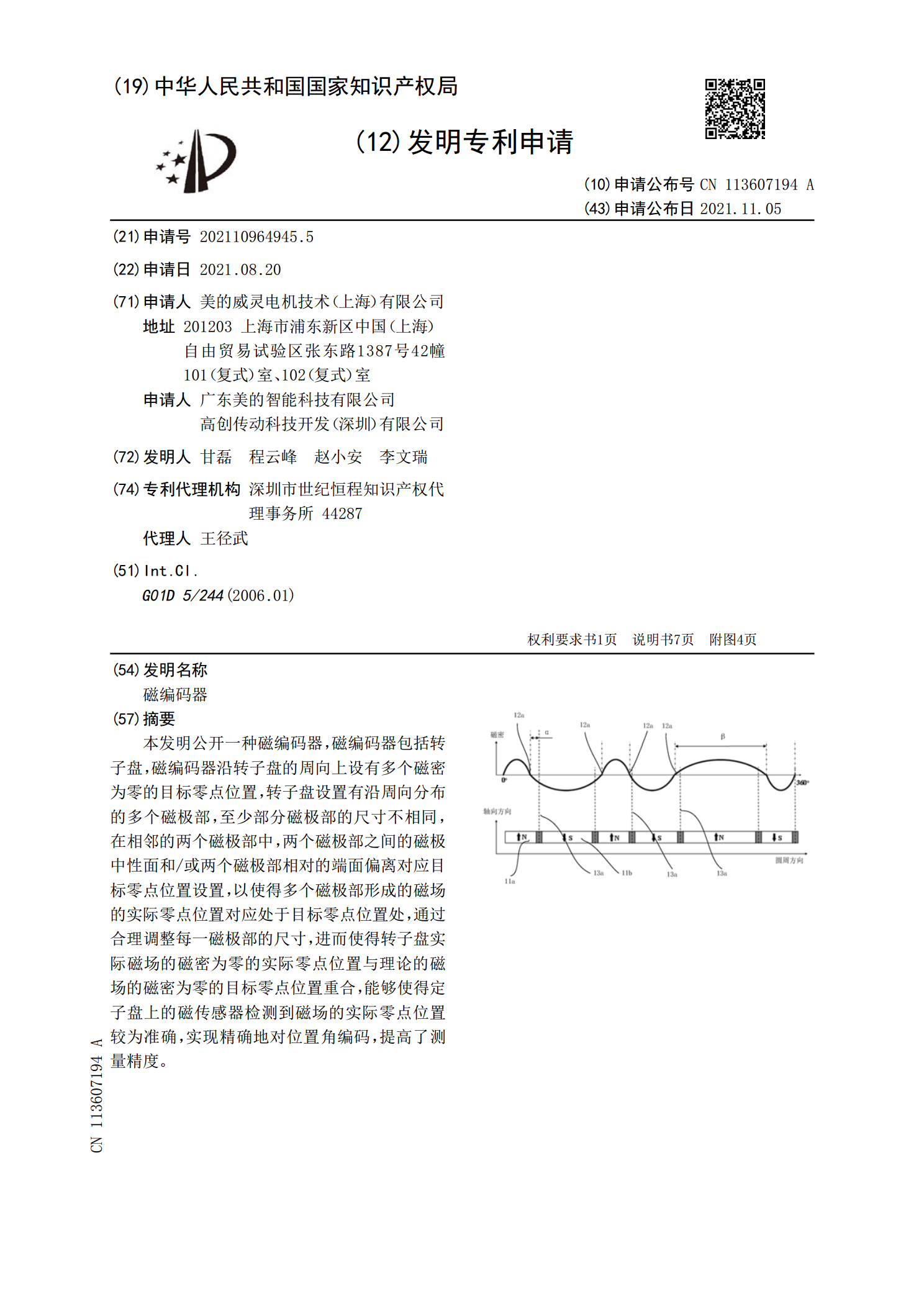
本发明公开一种磁编码器,磁编码器包括转子盘,磁编码器沿转子盘的周向上设有多个磁密为零的目标零点位置,转子盘设置有沿周向分布的多个磁极部,至少部分磁极部的尺寸不相同,在相邻的两个磁极部中,两个磁极部之间的磁极中性面和/或两个磁极部相对的端面偏离对应目标零点位置设置,以使得多个磁极部形成的磁场的实际零点位置对应处于目标零点位置处,通过合理调整每一磁极部的尺寸,进而使得转子盘实际磁场的磁密为零的实际零点位置与理论的磁场的磁密为零的目标零点位置重合,能够使得定子盘上的磁传感器检测到磁场的实际零点位置较为准确,实现
磁编码器.pdf
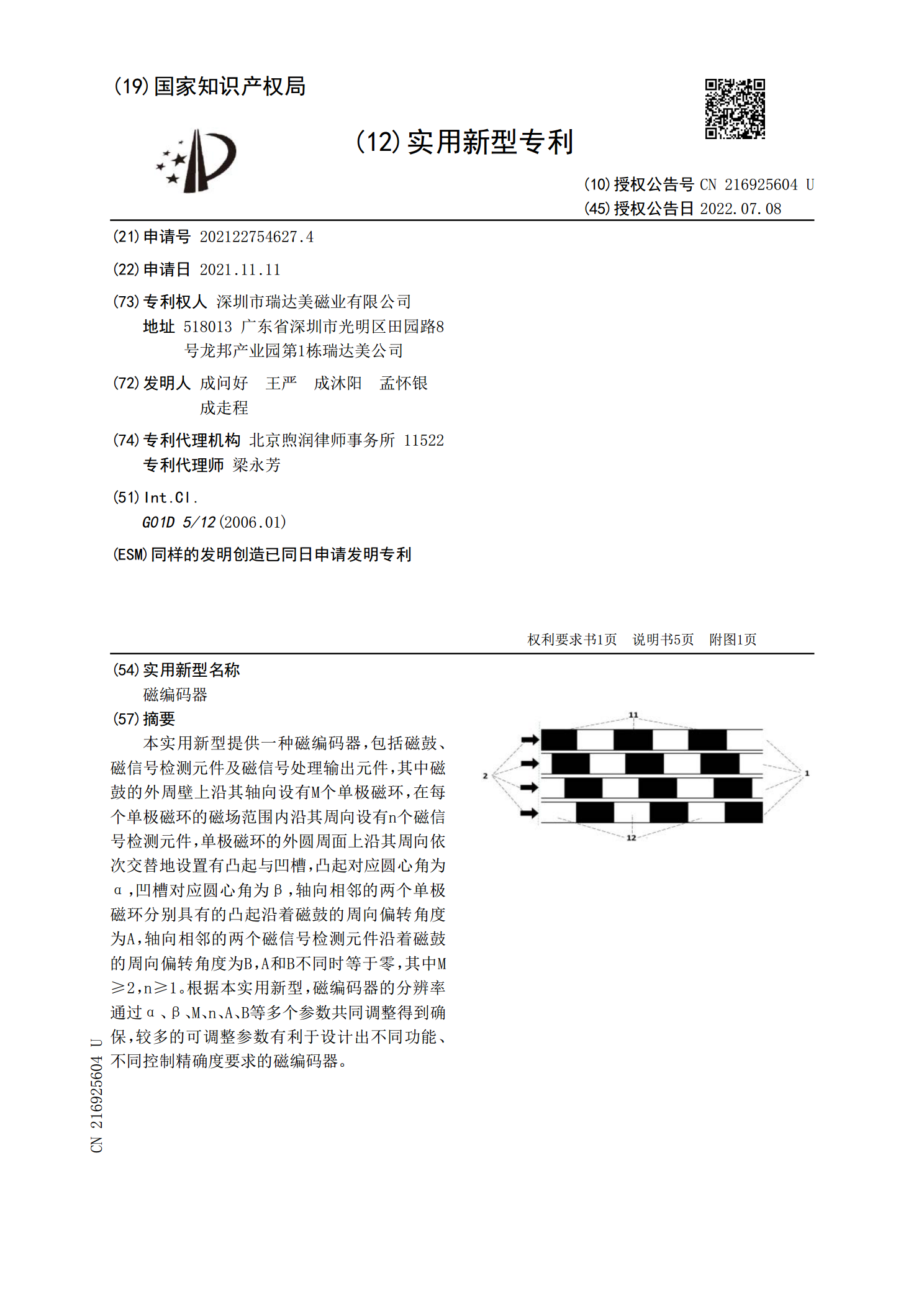
本实用新型提供一种磁编码器,包括磁鼓、磁信号检测元件及磁信号处理输出元件,其中磁鼓的外周壁上沿其轴向设有M个单极磁环,在每个单极磁环的磁场范围内沿其周向设有n个磁信号检测元件,单极磁环的外圆周面上沿其周向依次交替地设置有凸起与凹槽,凸起对应圆心角为α,凹槽对应圆心角为β,轴向相邻的两个单极磁环分别具有的凸起沿着磁鼓的周向偏转角度为A,轴向相邻的两个磁信号检测元件沿着磁鼓的周向偏转角度为B,A和B不同时等于零,其中M≥2,n≥1。根据本实用新型,磁编码器的分辨率通过α、β、M、n、A、B等多个参数共同调整得

基于磁编码器反馈的伺服系统设计.docx
基于磁编码器反馈的伺服系统设计基于磁编码器反馈的伺服系统设计摘要:伺服系统是一种常见的控制系统,在许多工业和自动化应用中广泛使用。本论文旨在研究并设计一种基于磁编码器反馈的伺服系统。首先,介绍了伺服系统的基本原理及其在工业应用中的重要性。然后,介绍了磁编码器的原理和优势。接下来,详细讨论了伺服系统设计的各个步骤,包括系统建模、控制器设计和参数调整等。最后,通过仿真和实验验证了所设计的伺服系统的性能和稳定性。本论文提供了一种基于磁编码器反馈的伺服系统设计方法,为伺服系统的实际应用提供了参考。关键词:伺服系统