
未配准多聚焦图像的快速融合方法.pdf

一只****呀淑


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

未配准多聚焦图像的快速融合方法.pdf
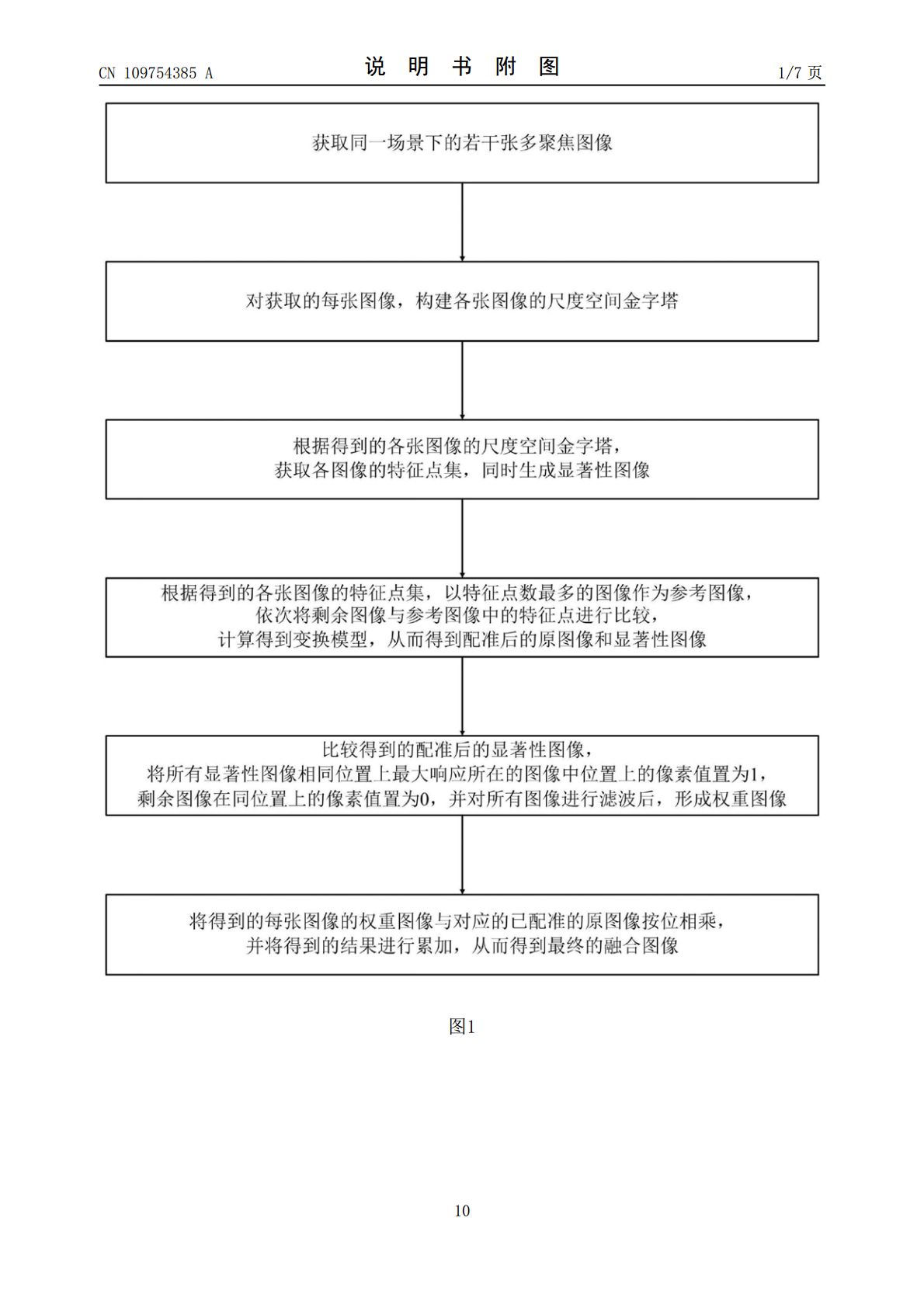
本发明公开了一种未配准多聚焦图像的快速融合方法,包括获取同一场景下的若干多聚焦图像;构建各图像的尺度空间金字塔;获取各图像的特征点集并生成显著性图像;以特征点数最多的图像作为参考图像,计算变换模型得到配准后的原图像和显著性图像;根据配准后的显著性图像形成权重图像;将每张图像的权重图像与对应的已配准的原图像按位相乘并累加,得到最终的融合图像。本发明方法能够降低对输入的待融合多聚焦图像的约束性,并且保证融合后的全局清晰图像能保留不同大小尺度的信息以达到较好的视觉质量,而且本发明方法的计算速度快,可靠性高、融合

一种快速多聚焦图像融合方法.pdf
本发明涉及一种快速多聚焦图像融合算法,首先,对源图像用平滑滤波器进行分解和构建一种多聚焦图像融合的决策图模型;其次,利用多聚焦图像邻域像素之间的相关性,提出一种快速导向滤波优化决策图,计算复杂度也大大降低;然后对两尺度图像进行重构;最后,利用本发明融合方法与其他三重现有融合方法对多聚焦图像进行融合。相对其他三种融合方法,不论在主观视觉和客观评价指标上,可以更好保留多聚焦图像的细节等纹理信息和显著性信息。

多聚焦图像融合方法综述.doc
多聚焦图像融合方法综述摘要:本文概括了多聚焦图像融合的一些基本概念和相关知识。然后从空域和频域两方面将多聚焦图像融合方法分为两大块,并对这两块所包含的方法进行了简单介绍并对其中小波变换化法进行了详细地阐述。最后提出了一些图像融合方法的评价方法。关键词:多聚焦图像融合;空域;频域;小波变换法;评价方法引言按数据融合的处理体系,数据融合可分为:信号级融合、像素级融合、特征级融合和符号级融合。图像融合是数据融合的一个重要分支,是20世纪70年代后期提出的概念。该技术综合了传感器、图像处理、信号处理、计算机和人工
多模式医学图像的融合和配准技术.pdf
图像配准方法和图像配准装置.pdf
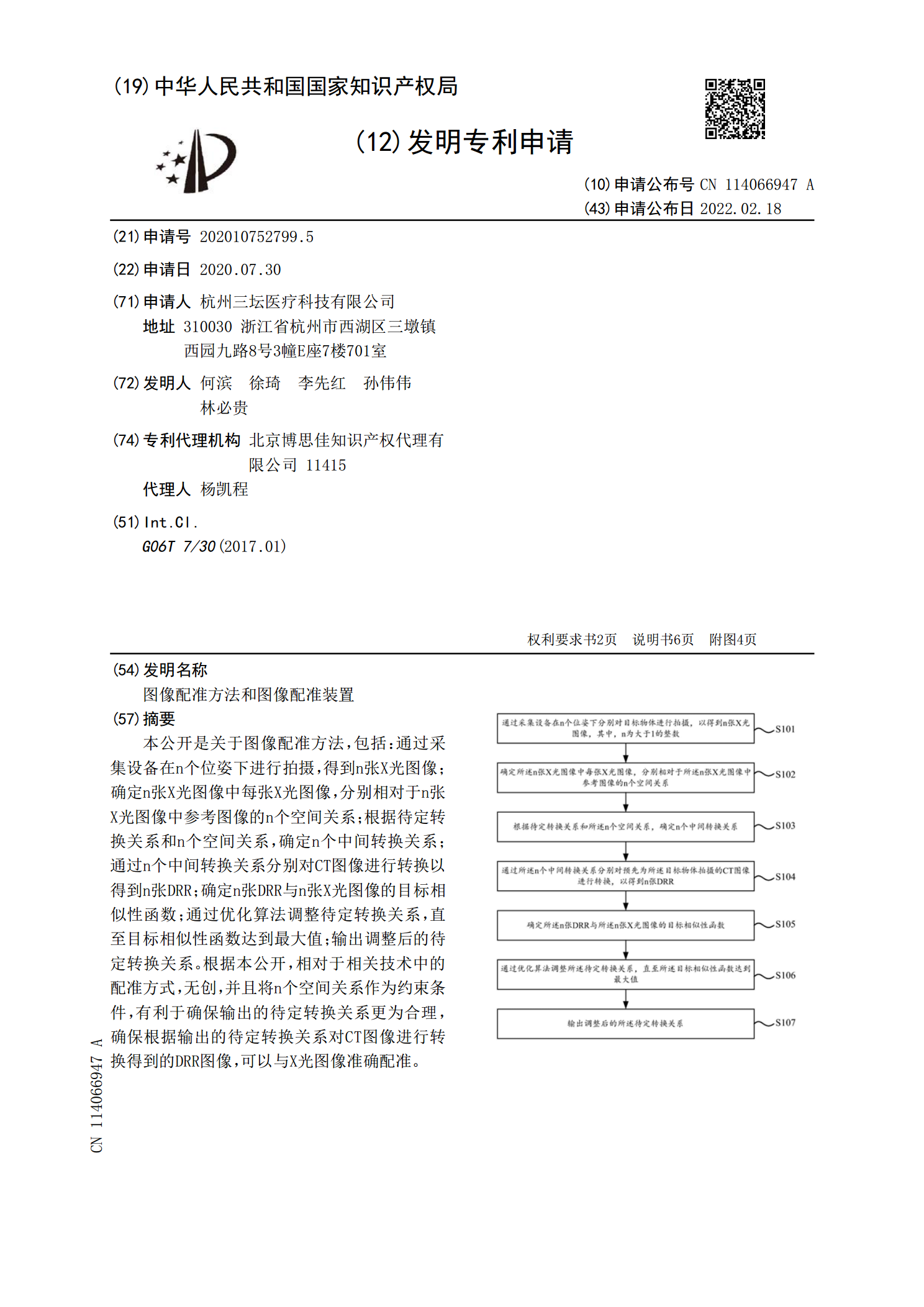
本公开是关于图像配准方法,包括:通过采集设备在n个位姿下进行拍摄,得到n张X光图像;确定n张X光图像中每张X光图像,分别相对于n张X光图像中参考图像的n个空间关系;根据待定转换关系和n个空间关系,确定n个中间转换关系;通过n个中间转换关系分别对CT图像进行转换以得到n张DRR;确定n张DRR与n张X光图像的目标相似性函数;通过优化算法调整待定转换关系,直至目标相似性函数达到最大值;输出调整后的待定转换关系。根据本公开,相对于相关技术中的配准方式,无创,并且将n个空间关系作为约束条件,有利于确保输出的待定转