
全自动T3绕线设备及绕线方法.pdf

盼易****君a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

全自动T3绕线设备及绕线方法.pdf
本发明旨在提供一种工作效率高、人工成本低且质量好的全自动T3绕线设备及绕线方法。本发明包括机座,所述机座上设置有依次连接的第一运输机构、分线机构、第二运输机构以及绕线机构,所述第一运输机构将留有线端的磁环夹紧移动至所述分线机构中,所述分线机构将需要绕入磁环的线分出,所述第二运输机构将线夹紧运输至所述绕线机构处,所述绕线机构将原磁环上伸出的线绕置在新磁环上。本发明应用于磁环组绕线的技术领域。

飞盘式全自动绕线机及其绕线方法.pdf
本发明公开了一种飞盘式全自动绕线机,包括台面平板,台面平板上固定设置有机头座,机头座上设置有至少一个旋转式飞盘,飞盘通过传送带连接主动轮;主动轮通过主电机实现驱动,带动飞盘旋转;主电机带动飞盘旋转;飞盘的固定内齿圈带动过桥齿轮及传动齿轮旋转,传动齿轮通过中间齿轮带动中心齿轮旋转;中心齿轮与飞盘同步旋转的同时,中心轴不转,中心轴上的绕线模具也不转。本发明能够对大电流电机采用多股并绕,使线经飞盘的飞叉杆飞入槽内,在绕线时多股线相互不交叉,线包排列整齐,端面紧凑清晰,质量可靠,既省时,又省力,还省成本,提高了经

绕线装置、绕线模具及绕线方法.pdf
本发明涉及一种绕线装置、绕线模具及绕线方法。一种绕线装置,用于在铁芯单体上绕设线圈,所述绕线装置包括机台、治具机构和绕线机构。一种绕线模具,所述绕线模具上设置有内孔,所述内孔外周间隔设置有若干用于安装铁芯单体的安装卡槽,多个所述铁芯单体安装在所述安装卡槽时,相邻所述铁芯单体之间具有间隙。一种绕线方法,包括以下步骤:将铁芯单体在周向上间隔排布形成轮廓为环形的构造,并将线绕设在所述铁芯单体上形成线圈,所述线相对所述环形的构造至少在四个维度上发生运动。具有自动化程度高,工作效率高的优点。

绕线系统及绕线方法.pdf
本发明涉及一种绕线系统及绕线方法,该系统包括排线机构、绕制机构以及控制机构,所述绕制机构包括电机、绕制轮盘以及固定支架,所述电机与所述绕制轮盘均固定于所述固定支架上,所述电机的传动轴与所述绕制轮盘固定连接,所述排线机构将线材进行整理导向后,传递至所述绕制轮盘,所述控制机构包括变频器以及计算机控制器,所述计算机控制器与所述排线机构以及变频器相连,所述变频器与所述电机相连。本发明利用计算机控制器控制的变频器改变电机的旋转角频率,实现自适应控制,达到电机高速绕制,且该系统换层时间精确,无需触点控制,可靠性更高。
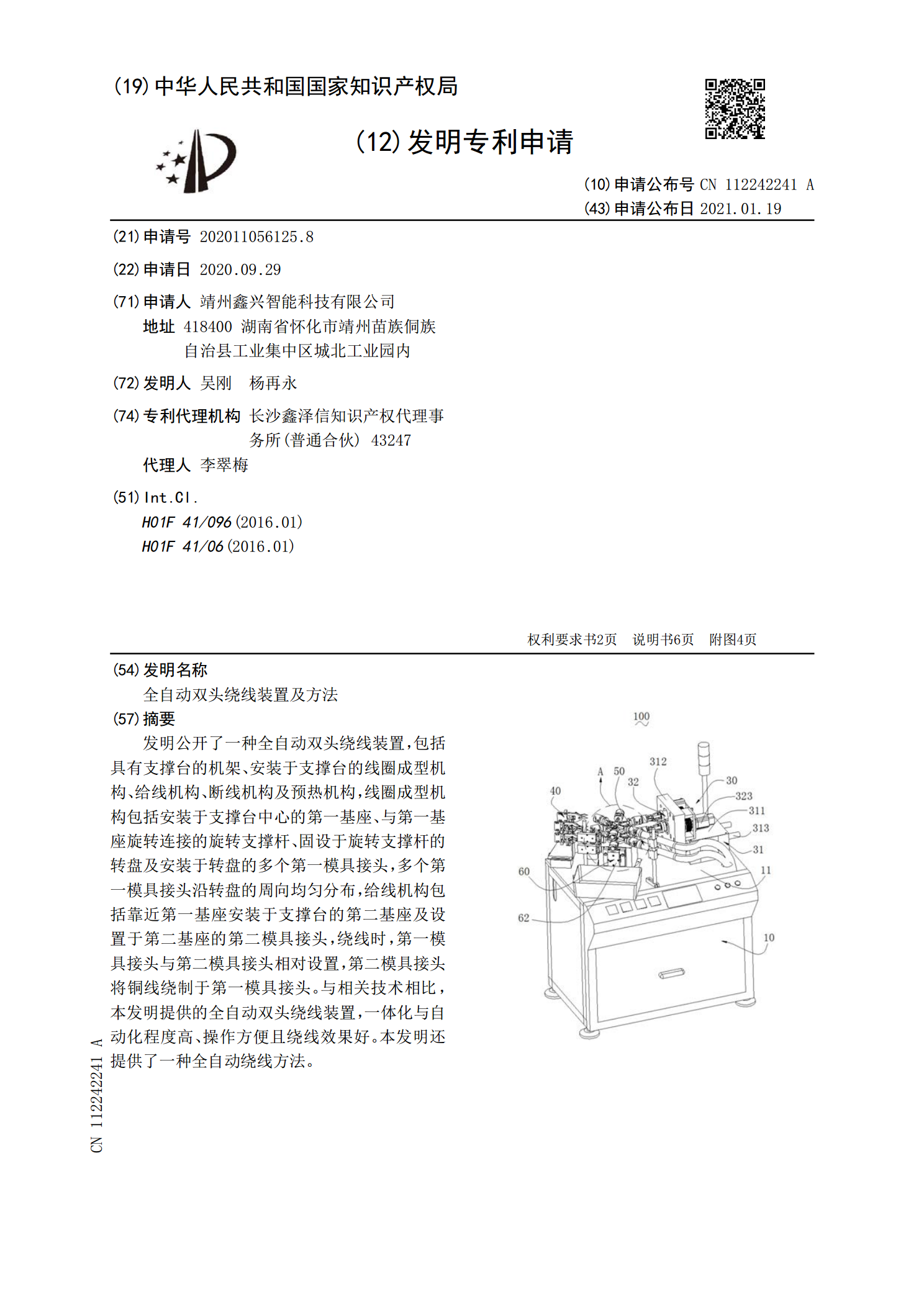
全自动双头绕线装置及方法.pdf
发明公开了一种全自动双头绕线装置,包括具有支撑台的机架、安装于支撑台的线圈成型机构、给线机构、断线机构及预热机构,线圈成型机构包括安装于支撑台中心的第一基座、与第一基座旋转连接的旋转支撑杆、固设于旋转支撑杆的转盘及安装于转盘的多个第一模具接头,多个第一模具接头沿转盘的周向均匀分布,给线机构包括靠近第一基座安装于支撑台的第二基座及设置于第二基座的第二模具接头,绕线时,第一模具接头与第二模具接头相对设置,第二模具接头将铜线绕制于第一模具接头。与相关技术相比,本发明提供的全自动双头绕线装置,一体化与自动化程度高